一种具有垃圾清理功能的无人船的制作方法
1.本实用新型涉及无人船技术领域,尤其涉及一种具有垃圾清理功能的无人船。
背景技术:
2.水环境是自然生态环境的重要组成部分,但伴随着工农业发展与城市化进程的加快,水环境恶化已成为不争的事实,各级政府及其相关职能部门也已经把水环境改善与修复列入了议事日程,并在实践中不断探索改善和修复水环境的良方,平原地区地势低平,水体流动性差,自净能力弱,容易形成死水,长期以往,会对当地的水生态环境、河道通航、居民宜居适应性和工农业发展等造成非常严重的负面影响,马路需要定期清扫、保养和修补,河流、湖泊等水域与马路一样,也需要定期打扫,维护水环境清洁,随着计算机技术和人工智能的发展以及无人机和无人汽车的兴起,无人船也开始受到人们越来越多的关注。
3.现有的具有垃圾清理功能的无人船还有许多问题尚且没有得到解决,例如:对河面垃圾的清理效率普遍较低,从而导致在清理一些比较大的湖泊或一些垃圾较多的湖泊时,往往需要非常长的时间,而且对于湖面的清理的干净程度也普遍较低,因此不具有实用性。
技术实现要素:
4.本实用新型的目的是为了解决现有技术中存在的缺点,而提出的一种具有垃圾清理功能的无人船。
5.为了实现上述目的,本实用新型采用了如下技术方案:一种具有垃圾清理功能的无人船,包括船体,所述船体两侧中间位置均贯穿并设置有通孔,所述船体内壁后端中间位置固定连接有第二电机,所述第二电机输出端贯穿船体并固定连接有支撑杆,所述船体内壁底部中间位置贯穿并设置有入料口,所述船体内壁底部中间位置固定连接有均匀分布的四个支撑腿,四个所述支撑腿顶部之间固定连接有集料箱,所述集料箱底部中间位置贯穿并固定连接有漏斗,所述集料箱后端固定连接有第一电机,所述第一电机输出端贯穿集料箱并固定连接有搅拌轴,所述船体内壁两侧中间靠两端位置均固定连接有支撑板,同一侧两个所述支撑板之间固定连接有传送带。
6.作为上述技术方案的进一步描述:
7.所述漏斗位于入料口顶部。
8.作为上述技术方案的进一步描述:
9.所述支撑杆两侧均固定连接有桨叶。
10.作为上述技术方案的进一步描述:
11.所述搅拌轴两侧均固定连接有均匀分布的三个切割刀片。
12.作为上述技术方案的进一步描述:
13.两个所述传送带外壁均固定连接有捞板。
14.作为上述技术方案的进一步描述:
15.所述传送带经过通孔。
16.作为上述技术方案的进一步描述:
17.所述船体底部固定连接有船舱。
18.本实用新型具有如下有益效果:
19.本实用新型中,首先启动传送带,捞板随着传动带的转动从而进行移动,对水面的垃圾进行打捞,垃圾随着捞板经过通孔移动至传送带顶端时,就会通过自身惯性掉入集料箱中,启动第一电机,促使搅拌轴通过切割刀片进行切割,切割后的垃圾随着漏斗的弧面从入料口落入船舱中进行储藏,通过捞板对船体两侧的垃圾同时进行打捞,极大的提高了无人船的工作效率。
附图说明
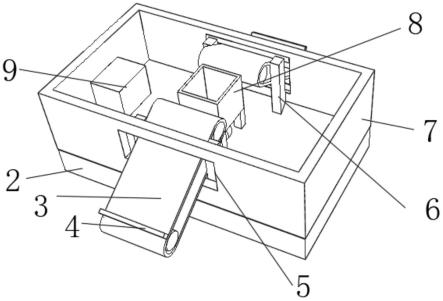
20.图1为本实用新型提出的一种具有垃圾清理功能的无人船的立体图;
21.图2为本实用新型提出的一种具有垃圾清理功能的无人船的剖面图;
22.图3为本实用新型提出的一种具有垃圾清理功能的无人船的俯视图。
23.图例说明:
24.1、第一电机;2、船舱;3、传送带;4、捞板;5、通孔;6、支撑板;7、船体;8、集料箱;9、第二电机;10、入料口;11、漏斗;12、支撑腿;13、支撑杆;14、桨叶;15、切割刀片;16、搅拌轴。
具体实施方式
25.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
26.在本实用新型的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制;术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性,此外,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
27.参照图1-3,本实用新型提供的一种实施例:一种具有垃圾清理功能的无人船,包括船体7,船体7两侧中间位置均贯穿并设置有通孔5,船体7内壁后端中间位置固定连接有第二电机9,第二电机9输出端贯穿船体7并固定连接有支撑杆13,船体7内壁底部中间位置贯穿并设置有入料口10,船体7内壁底部中间位置固定连接有均匀分布的四个支撑腿12,四个支撑腿12顶部之间固定连接有集料箱8,集料箱8底部中间位置贯穿并固定连接有漏斗11,集料箱8后端固定连接有第一电机1,第一电机1输出端贯穿集料箱8并固定连接有搅拌轴16,船体7内壁两侧中间靠两端位置均固定连接有支撑板6,同一侧两个支撑板6之间固定
连接有传送带3,通过支撑板6对传送带3进行支撑,通过支撑腿12对集料箱8进行支撑,启动第二电机9,桨叶14通过支撑杆13在水中转动,从而推动船体7前进,启动传送带3,捞板4随着传动带的转动从而进行移动,对水面的垃圾进行打捞,垃圾随着捞板4经过通孔5移动至传送带3顶端时,就会通过自身惯性掉入集料箱8中,启动第一电机1,促使搅拌轴16通过切割刀片15进行切割,切割后的垃圾随着漏斗11的弧面从入料口10落入船舱2中进行储藏,通过捞板4对船体7两侧的垃圾同时进行打捞,极大的提高了无人船的工作效率。
28.漏斗11位于入料口10顶部,支撑杆13两侧均固定连接有桨叶14,搅拌轴16两侧均固定连接有均匀分布的三个切割刀片15,两个传送带3外壁均固定连接有捞板4,传送带3经过通孔5,船体7底部固定连接有船舱2。
29.工作原理:通过支撑板6对传送带3进行支撑,通过支撑腿12对集料箱8进行支撑,启动第二电机9,桨叶14通过支撑杆13在水中转动,从而推动船体7前进,启动传送带3,捞板4随着传动带的转动从而进行移动,对水面的垃圾进行打捞,垃圾随着捞板4经过通孔5移动至传送带3顶端时,就会通过自身惯性掉入集料箱8中,启动第一电机1,促使搅拌轴16通过切割刀片15进行切割,切割后的垃圾随着漏斗11的弧面从入料口10落入船舱2中进行储藏,通过捞板4对船体7两侧的垃圾同时进行打捞,极大的提高了无人船的工作效率。
30.最后应说明的是:以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1