一种仿生蝠鲼潜水推进器
1.本发明涉及水下机器人领域,具体涉及一种仿生蝠鲼潜水推进器。
背景技术:
2.近年来,随着海洋资源的开发与利用,水下机器人蓬勃发展。在进阶潜水教学中,开放水域水肺潜水员在“进阶历险”部分的学习中会涉及到“水下推进器”的使用。自发明以来,潜水推进器一直很受欢迎,其好处是显而易见的:它可以使潜水员消耗最少的体力到达最大的深度,耗气量变少,在水里停留时间变长。许多潜水员说使用推进器令他们更能专注于自己的呼吸,同时,它可以帮助你花很少的气就从海岸到达潜点,船潜时也能帮你在规定时间内看到更多景色。目前,被潜水员广泛选择的手持潜水推进器多为鱼雷状,蝠鲼型几乎没有。
3.随着越来越多的科研人员开始研究采用mpf推进模式游动的机器鱼,如美国西北大学的epstein等人研制了仿生带状长鳍推进器,日本的yamamoto等基于扑翼原理模仿双吻前口蝠鲼研制了柔性机器鱼,中国国防科技大学研究了柔性长鳍波动推进的仿生水下机器人和胸鳍摆动模式推进机器鱼以及北京航空航天大学研制了单自由度的仿蝠鲼水下机器鱼等等。以蝠鲼为代表的mpf模式游动的鱼类被发掘运用到水下机器制造中,让仿生蝠鲼潜水推进器的实现有据可依。
4.现有的仿生蝠鲼潜水推进器多为自主式水下航行器,侧重于独立的潜水作业,而脱离了潜水员本身,既不利于提高工作效率,也对潜水员在水下的行进没有帮助。
5.本技术一种仿生蝠鲼潜水推进器,在不妨碍推进器本身具有的辅助设备运行的情况下,能够实现助推潜水员在水下行进。
技术实现要素:
6.为实现上述技术目的,本实用新型公开了一种仿生蝠鲼潜水推进器,以仿生蝠鲼为基础在潜水推进器上安装两个操作杆将潜水员与推进器联系在一起,助推潜水员在水下的游行。
7.本技术是通过以下技术方案实现的:
8.一种仿生蝠鲼潜水推进器,是以仿生蝠鲼为基础,包括电池舱、柔性胸鳍、操纵杆、控制舱和尾鳍,所述控制舱作为核心部件,与电池舱、柔性胸鳍、操纵杆和尾鳍分别相连,所述控制舱用于放置控制系统,所述控制舱设有一锁扣,方面打开和关闭,所述柔性胸鳍包括两个,分别为蝠鲼左鳍、蝠鲼右鳍,所述蝠鲼左鳍、蝠鲼右鳍通过软体材料分别对称浇铸在控制舱背部的两侧,蝠鲼左鳍、蝠鲼右鳍的下面分别设有一个螺旋桨推进器,所述控制舱的左右两侧分别对称设有两对舵机,螺旋桨推进器、舵机分别和控制系统信号连接,所述操纵杆包括两个,分别设置在控制舱的背部靠前位置,所述电池舱设置在控制舱的顶部,所述电池舱用于放置电池,给整个控制系统供电,所述尾鳍设置在控制舱的底部,所述尾鳍内部设置有尾部驱动器支架,该尾部驱动器支架和控制舱内的控制系统信号连接。
9.作为优选实施例,所述潜水推进器的外形整体成扁平形状。
10.作为优选实施例,所述柔性胸鳍设计成三角形,作为潜水推进器的推进结构,柔性胸鳍通过柔性摆动为潜水推进器的游动提供动力,三角形的结构能减小水的阻力。
11.作为优选实施例,当蝠鲼左鳍、蝠鲼右鳍同时摆动时,能实现前进运动,当蝠鲼左鳍摆动时,蝠鲼右鳍静止,能实现转弯运动。
12.作为优选实施例,所述柔性胸鳍包括仿生鳍单元、弹性鳍面,所述仿生鳍单元与乳胶皮材料制成的弹性鳍面之间采用粘接方式连接,仿生鳍单元包括两个,分别设置在柔性胸鳍的前缘处,所述仿生鳍单元能将柔性胸鳍前缘的运动向后传递,以更好地模拟蝠鲼胸鳍的柔性摆动。
13.作为优选实施例,所述仿生鳍单元采用直径为0.2mm的sma丝作为驱动材料,所述仿生鳍单元包括基体、sma丝、硅胶蒙皮和弹性体,弹性体固定在基体上,在弹性体的两侧分别布置sma丝,在sma丝上覆盖硅胶蒙皮。
14.作为优选实施例,所述仿生鳍单元宽9mm,总长80mm,厚3mm,仿生鳍单元采用差动方式工作,当一侧的sma丝收缩,带动仿生鳍单元弯曲,同时拉伸另一侧的sma丝;另一侧sma丝收缩,带动仿生鳍单元向相对侧方向弯曲,同时拉伸相反侧的sma丝,在两根sma丝差动收缩的带动下仿生鳍单元能够实现向上和向下的柔性弯曲摆动运动。sma丝的收缩动作可以很好地模拟蝠鲼胸鳍肌肉的收缩运动,柔性仿生鳍单元在差动运动过程中,聚乙烯材料的弹性体和硅胶蒙皮能够在sma丝收缩时存储弹性能,而在sma丝回复时释放弹性能,提高能量的利用效率。仿生鳍单元弯曲摆动过程中,sma丝紧贴弹性体,整个柔性鳍单元可以实现均匀曲率弯曲。
15.作为优选实施例,所述尾鳍包括两块较薄的片状物,所述尾鳍用于稳定航向,是由表面涂覆硅胶的聚乙烯片构成。
16.作为优选实施例,两个操纵杆,其中一个固定不动,只供手抓握,另一个可通过手动操纵控制潜水推进器的运动方向、速度。
17.作为优选实施例,所述控制系统包括无线发射模块、无线接收模块、控制驱动模块,所述无线发射模块和无线接收模块分别是基于pt2262芯片、sc2272芯片的能提供6路无线控制信号的集成电路模块,控制驱动模块的主控芯片采用pic16f877a单片机,rb0~rb6端口与无线接收模块连接,rd0~rd3与mosfet连接控制4路sma丝的通断电,利用rb0端口的电平跳变中断功能实现对仿生蝠鲼游动状态的实时控制。
18.有益效果:
19.(1)本技术一种仿生蝠鲼潜水推进器在仿生蝠鲼潜水器上增设一个操纵杆结构,巧妙的将人与机器结合,使它不单单是一个潜水器,而是成为潜水员在水下游行的得力助手。
20.(2)本技术的操纵杆设置一对,分别安装于控制舱背部的前方,潜水员可双手紧握两个操纵杆,进行方向的控制。动作信号将变为电信号传达给控制舱内部,再转换为机器的运动信号。本技术通过在仿生蝠鲼潜水推进器上安装两个操作杆将潜水员与推进器有效联系起来,可以有效改善潜水员在水中的行进速度,同时完成一些辅助潜水工作,提高了潜水员的效率。
21.(3)潜水员在水下的运动受到氧气的限制,因此一次下水的时间往往较短。该潜水
推进器能够减少潜水员在水下作业时的运动量从而减少氧气消耗量,让潜水员在水下的时间利用率最大化。另外,两个操纵杆的设计帮助潜水员更好的控制身体与推进器的一致运动。
附图说明
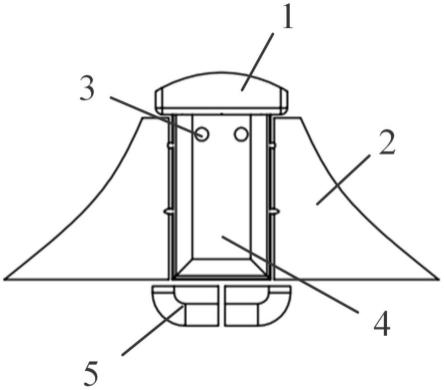
22.图1为本技术一种仿生蝠鲼潜水推进器的整体结构示意图。
23.图2为图1的侧视图。
24.图3为图1的仰视图。
25.图4为本技术一种仿生蝠鲼潜水推进器中控制舱的结构示意图。
26.图5为本技术一种仿生蝠鲼潜水推进器中柔性胸鳍的结构示意图。
27.图6为本技术一种仿生蝠鲼潜水推进器中尾鳍的结构示意图。
28.图7为本技术一种仿生蝠鲼潜水推进器中电池舱的结构示意图。
29.图8为本技术一种仿生蝠鲼潜水推进器中操纵杆的结构示意图。
30.图9为本技术一种仿生蝠鲼潜水推进器中控制系统的模块结构示意图。
31.图10为本技术一种仿生蝠鲼潜水推进器中仿生鳍单元的结构示意图。
具体实施方式
32.下面结合附图对本发明的实施例作详细说明:本实施例在以本发明技术方案为前提下进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
33.实施例:
34.如图1、2、3、4所示,一种仿生蝠鲼潜水推进器,是以仿生蝠鲼为基础,包括电池舱1、柔性胸鳍2、操纵杆3、控制舱4和尾鳍5,控制舱4作为核心部件,与电池舱1、柔性胸鳍2、操纵杆3和尾鳍5分别相连,控制舱4用于放置控制系统,控制舱4设有一锁扣,方面打开和关闭,柔性胸鳍2包括两个,分别为蝠鲼左鳍、蝠鲼右鳍,蝠鲼左鳍、蝠鲼右鳍通过软体材料分别对称浇铸在控制舱4背部的两侧,蝠鲼左鳍、蝠鲼右鳍的下面分别设有一个螺旋桨推进器,控制舱4的左右两侧分别对称设有两对舵机,螺旋桨推进器、舵机分别和控制系统信号连接。四个舵机分别控制潜水推进器的前后左右四个方向的运行。
35.操纵杆3包括两个,分别设置在控制舱4的背部靠前位置,电池舱1设置在控制舱4的顶部,电池舱1用于放置电池,给整个控制系统供电,尾鳍5设置在控制舱4的底部,尾鳍5内部设置有尾部驱动器支架,该尾部驱动器支架和控制舱4内的控制系统信号连接。潜水推进器的外形整体成扁平形状。
36.如图5、6、7、8所示,柔性胸鳍2设计成三角形,作为潜水推进器的推进结构,柔性胸鳍2通过柔性摆动为潜水推进器的游动提供动力,三角形的结构能减小水的阻力。当蝠鲼左鳍、蝠鲼右鳍同时摆动时,能实现前进运动,当蝠鲼左鳍摆动时,蝠鲼右鳍静止,能实现转弯运动。柔性胸鳍2和尾鳍5可以采用的材料包括形状记忆合金(sma)、离子高分子导电薄膜(icpf)、压电陶瓷(pzt),sma相比其它材料具有电阻率高、疲劳寿命高、形变回复量大、形状回复应力大、能量密度高等优点,故本实施例,采用sma丝作为驱动材料。
37.尾鳍5位于控制舱4的底部,尾鳍5包括两块较薄的片状物,尾鳍5用于稳定航向,是
由表面涂覆硅胶的聚乙烯片构成。两个操纵杆分别设置在控制舱4的背部靠前位置,其中一个操纵杆3固定不动,只供手抓握,另一个操纵杆3可通过手动操纵控制潜水推进器的运动方向、速度。
38.如图10所示,柔性胸鳍2包括仿生鳍单元21、弹性鳍面22,仿生鳍单元21与乳胶皮材料制成的弹性鳍面22之间采用粘接方式连接,仿生鳍单元21包括两个,分别设置在柔性胸鳍2的前缘处,仿生鳍单元21能将柔性胸鳍2前缘的运动向后传递,以更好地模拟蝠鲼胸鳍的柔性摆动。仿生鳍单元21采用直径为0.2mm的sma丝作为驱动材料,仿生鳍单元21包括基体211、sma丝212、硅胶蒙皮213和弹性体214,弹性体214固定在基体211上,在弹性体214的两侧分别布置sma丝212,在sma丝212上覆盖硅胶蒙皮213。仿生鳍单元21宽9mm,总长80mm,厚3mm,仿生鳍单元21采用差动方式工作,当一侧的sma丝收缩,带动仿生鳍单元21弯曲,同时拉伸另一侧的sma丝;另一侧sma丝收缩,带动仿生鳍单元21向相对侧方向弯曲,同时拉伸相反侧的sma丝,在两根sma丝差动收缩的带动下仿生鳍单元21能够实现向上和向下的柔性弯曲摆动运动。sma丝的收缩动作可以很好地模拟蝠鲼胸鳍肌肉的收缩运动,柔性仿生鳍单元在差动运动过程中,聚乙烯材料的弹性体和硅胶蒙皮能够在sma丝收缩时存储弹性能,而在sma丝回复时释放弹性能,提高能量的利用效率。仿生鳍单元弯曲摆动过程中,sma丝紧贴弹性体,整个柔性鳍单元可以实现均匀曲率弯曲。
39.如图9所示,控制系统包括无线发射模块、无线接收模块、控制驱动模块,所述无线发射模块和无线接收模块分别是基于pt2262芯片、sc2272芯片的能提供6路无线控制信号的集成电路模块,控制驱动模块的主控芯片采用pic16f877a单片机,rb0~rb6端口与无线接收模块连接,rd0~rd3与mosfet连接控制4路sma丝的通断电,利用rb0端口的电平跳变中断功能实现对仿生蝠鲼游动状态的实时控制。
40.以上显示和描述了本发明的基本原理和主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1