一种基于双轴舵机控制的仿生机器鱼装置
本技术涉及仿生机械,特别是涉及一种基于双轴舵机控制的仿生机器鱼装置。
背景技术:
1、随着科技的发展,机器人应用越来越广泛。仿生机器鱼作为机器人家族中的重要成员,具有高度灵活性和柔性,在水质检测、水下搜救、监测鱼类的生活状况以及在军事方面都起到了重要作用。
2、仿生机器鱼形似鲤鱼,身上装备有探测传感器,可以发现水中的多种污染物,如轮船泄漏的燃油或其他化学物等,并利用gps装置将数据适时传给研究人员。之后科学家再用这些数据绘制实时的水污染3d图,好让环保部门采取最好办法来清除这里的污染物。
3、目前的仿生机器鱼主要是由摆动模块、控制模块、以及机械拉杆结构组成,通过设置在仿生机器鱼内的机械拉杆结构,带动仿生机器鱼的尾部或者胸鳍部位等摆动部件摆动从而实现仿生机器鱼在水中实现游动后再利用控制模块控制仿生机器鱼的方向。
4、但是,现有的仿生机器鱼中主要都是通过驱动仿生机器鱼的胸鳍来提供动力再通过手动控制仿生机器鱼头的转向进而实现仿生机器鱼在游动中能够避障的目的,而利用胸鳍摆动提供动力和手动控制仿生机器鱼的游动方位具有较多缺点,如推进效率低、机动性差、控制方式单一难以实现下潜上浮功能,手动控制人力成本高、无法实现自主避障等。
技术实现思路
1、本实用新型针对上述技术问题,克服现有技术的缺点,提供一种基于双轴舵机控制的仿生机器鱼装置。
2、为了解决以上技术问题,本实用新型提供一种基于双轴舵机控制的仿生机器鱼装置。
3、技术效果:解决了现今的仿生机器鱼利用胸鳍摆动时导致动力不足,推进效率低,机动性能差,耗能高,推进作用弱导致仿生机器鱼在进行转向运动时会降低其游动灵活性,机动性,不利于仿生机器鱼的运动协调,同时难以控制仿生鱼的转向以及难以自主避障的问题,还降低了人力成本,增大了控制范围。
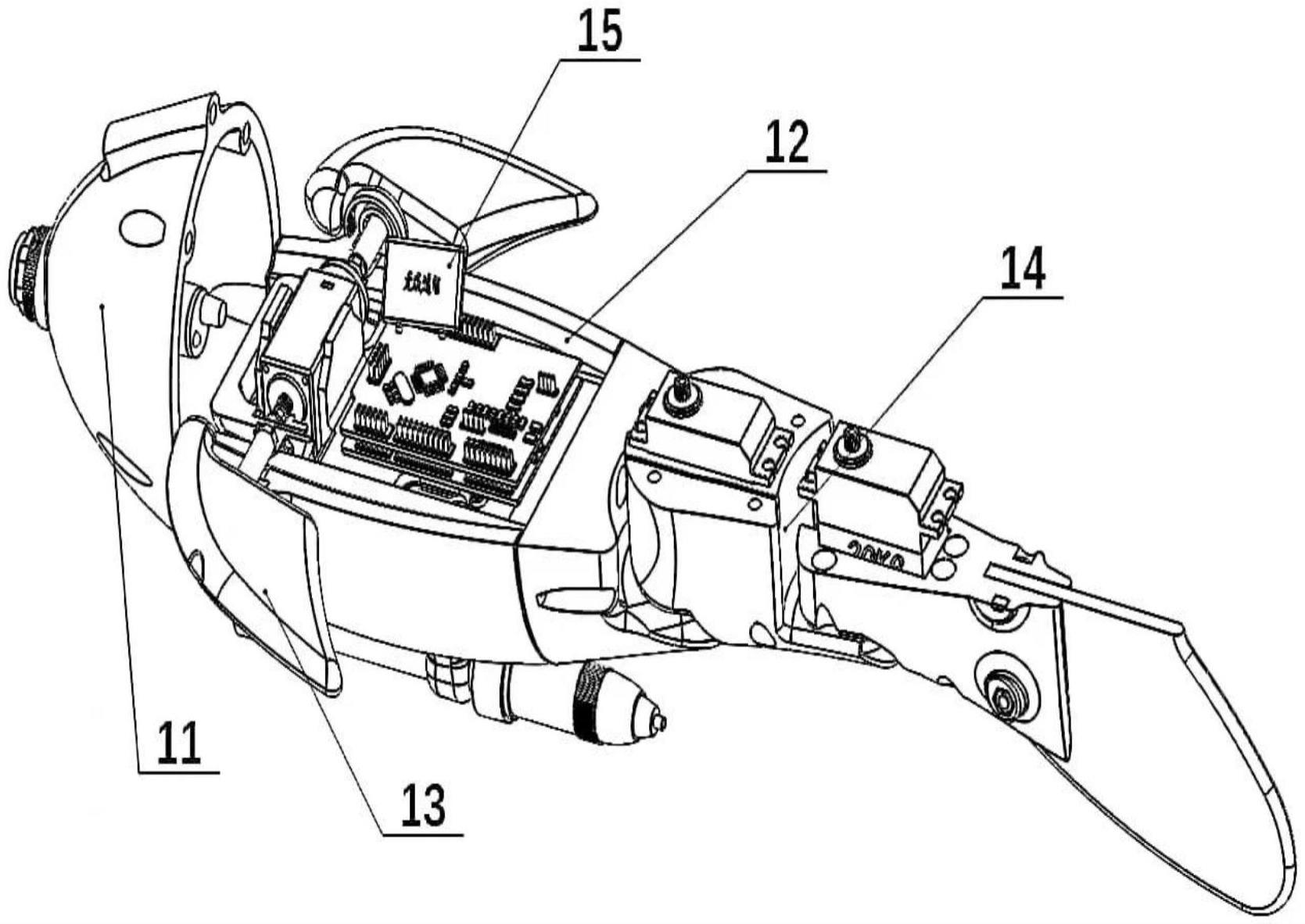
4、本实用新型进一步限定的技术方案是:一种基于双轴舵机控制的仿生机器鱼装置,包括相互连接的鱼头部件、鱼身部件以及可相对于鱼身部件摆动以驱动前进的鱼尾部件,鱼身部件中安置有
5、无线通信模块,包括无线蓝牙模块和wifi连接模块,用于传输和接收无限信号;
6、配重块,用于控制重心位置以实现下潜或上浮;
7、固定板,其上安装有arduino模块、arduino扩展板和电池,用于处理无线信号、控制仿生机器鱼各部件工作并提供电力支持;
8、鱼身部件外靠近鱼头部件位置安装有双轴舵机,双轴舵机两侧均连接有随之同步转动的胸鳍部件,用以控制仿生机器鱼游动时的角度;
9、鱼头部件内原理鱼身部件的一端设有与无线通信模块电连接的防水红外线传感器,用于探测障碍物以实现自动仿生机器鱼的避障。
10、进一步的,鱼身部件中设有沿鱼身部件长度方向分布的轨道,固定板两侧凸起形成边缘并嵌设于轨道中;双轴舵机安装于固定板前端位置,固定板后端位置则安装无线通信模块、arduino模块和arduino扩展板块,上述模块均通过螺丝于固定板固定连接;固定板底部形成有o型空腔,电池置于o型空腔内,配重块置于固定板底部与鱼身部件内底面之间。
11、前所述的一种基于双轴舵机控制的仿生机器鱼装置,胸鳍部件通过螺纹固定轴与双轴舵机连接,并通过螺丝固定;胸鳍部件与鱼身部件之间的间隙通过防水橡胶圈密封,双轴舵机两侧的胸鳍部件关于鱼身部件对称设置。
12、前所述的一种基于双轴舵机控制的仿生机器鱼装置,鱼头部件与鱼身部件之间的缝隙通过密封防水垫密封,鱼头部件、鱼身部件与鱼尾部件之间均通过m2螺丝固定连接;鱼头部件前端开孔以放置防水红外线传感器,并设有红外前盖与防水胶圈,以实现固定密封防水。
13、前所述的一种基于双轴舵机控制的仿生机器鱼装置,鱼尾部件包括依次连接的前尾鳍、中尾鳍和后尾鳍,前尾鳍包括上下两部分,并与中尾鳍镶嵌式连接,前尾鳍内通过螺丝固定有力传动圆盘,中尾鳍内设有单轴舵机,用于实现中尾鳍相对于前尾鳍的自由转动。
14、前所述的一种基于双轴舵机控制的仿生机器鱼装置,前尾鳍与鱼身部件之间间隙中设有防水垫,鱼身部件与前尾鳍之间通过螺丝固定。
15、前所述的一种基于双轴舵机控制的仿生机器鱼装置,后尾鳍和中尾鳍之间的连接结构与中尾鳍与前尾鳍之间的连接结构相同,中尾鳍后端设有与前尾鳍中相同的力传动圆盘,后尾鳍前端设有与中尾鳍内相同的单轴舵机。
16、前所述的一种基于双轴舵机控制的仿生机器鱼装置,后尾鳍上通过螺丝固定由鱼尾拨板,用于增强仿生机器鱼的整体浮力和推进作用,鱼尾部件通过组合摆动的中尾鳍和后尾鳍形成前进、后退、左转或右转的动作组。
17、前所述的一种基于双轴舵机控制的仿生机器鱼装置,鱼头部件、鱼身部件和鱼尾部件均通过3d打印机以pla防水材料3d打印制得拼接,并通过m2螺丝连接固定。
18、前所述的一种基于双轴舵机控制的仿生机器鱼装置,arduino模块、arduino扩展板块、双轴舵机、两个单轴舵机以及若干条用于连接上述模块的杜邦线组成arduino控制系统,用于分别控制胸鳍部件和鱼尾部件的摆动。
19、本实用新型的有益效果是:
20、(1)本实用新型中,通过鱼尾部件摆动,胸鳍部件调整方向,模仿鱼类游动,提高了推进效率,增强了推进作用,提升了机动性,减小了与水的接触面积,降低了能耗;
21、(2)本实用新型中,避免由于胸鳍摆动防水不到位且尾部不平衡产生的空穴现象,降低了水的阻力,以便于实现下潜和上浮的功能;
22、(3)本实用新型中,鱼尾部件呈角度设置和摆动,由中尾鳍与后尾鳍形成组合摆动,可形成前进、后退、左转、右转等动作组,提升仿生机器鱼在水中的灵活性;
23、(4)本实用新型中,通过无线控制代替手动控制,提升了控制范围,同时能够对仿生机器鱼进行实施控制,减少了人力物力的耗费,降低了成本,同时设置的防水红外线传感器能够实现仿生机器鱼的自主避障;
24、(5)本实用新型中,通过设置鱼头、鱼身、胸鳍以及鱼尾组合可构成一完整的仿生鱼,并将其进行硬件安装、部件拼接以及不断的对尺寸大小进行调配;
25、鱼身采用流线型鱼体,并且通过配重块和胸鳍部分实现平衡,而尾鳍摆动产生的尾流和胸鳍的摆动能够实现推动作用;
26、同时,利用双轴舵机,红外传感器,无线wifi传输模块,arduino板以及arduino扩展板使仿生鱼总共具有五个方面管理层,分别是:运动控制管理层、远程数据管理层、无线数据传输层、现场数据处理层;
27、利用手机和电脑通过无线蓝牙模块连接仿生机器鱼后,再通过wifi连接模块向仿生机器鱼的发送目标位置,仿生机器鱼进行目标位置与自身位置比对后借助胸鳍和尾鳍的摆动提供动力,在游动的过程中其通过无线蓝牙模块以及wifi连接模块来控制仿生机器鱼中的arduino板,实现变速游动,而仿生机器鱼会通过防水红外线传感器自主避障,达到目标位置。
技术特征:
1.一种基于双轴舵机控制的仿生机器鱼装置,包括相互连接的鱼头部件(11)、鱼身部件(12)以及可相对于所述鱼身部件(12)摆动以驱动前进的鱼尾部件(14),其特征在于:所述鱼身部件(12)中安置有
2.根据权利要求1所述的一种基于双轴舵机控制的仿生机器鱼装置,其特征在于:所述鱼身部件(12)中设有沿鱼身部件(12)长度方向分布的轨道(21),所述固定板(18)两侧凸起形成边缘并嵌设于轨道(21)中;所述双轴舵机(19)安装于所述固定板(18)前端位置,所述固定板(18)后端位置则安装所述无线通信模块(15)、所述arduino模块(16)和所述arduino扩展板块,上述模块均通过螺丝于固定板(18)固定连接;所述固定板(18)底部形成有o型空腔,所述电池(9)置于o型空腔内,所述配重块(17)置于所述固定板(18)底部与鱼身部件(12)内底面之间。
3.根据权利要求1所述的一种基于双轴舵机控制的仿生机器鱼装置,其特征在于:所述胸鳍部件(13)通过螺纹固定轴与所述双轴舵机(19)连接,并通过螺丝固定;所述胸鳍部件(13)与所述鱼身部件(12)之间的间隙通过防水橡胶圈密封,所述双轴舵机(19)两侧的胸鳍部件(13)关于所述鱼身部件(12)对称设置。
4.根据权利要求1所述的一种基于双轴舵机控制的仿生机器鱼装置,其特征在于:所述鱼头部件(11)与所述鱼身部件(12)之间的缝隙通过密封防水垫(20)密封,所述鱼头部件(11)、所述鱼身部件(12)与所述鱼尾部件(14)之间均通过m2螺丝固定连接;所述鱼头部件(11)前端开孔以放置所述防水红外线传感器(1),并设有红外前盖(10)与防水胶圈,以实现固定密封防水。
5.根据权利要求1所述的一种基于双轴舵机控制的仿生机器鱼装置,其特征在于:所述鱼尾部件(14)包括依次连接的前尾鳍(22)、中尾鳍(23)和后尾鳍(24),所述前尾鳍(22)包括上下两部分,并与所述中尾鳍(23)镶嵌式连接,所述前尾鳍(22)内通过螺丝固定有力传动圆盘(31),所述中尾鳍(23)内设有单轴舵机(6),用于实现所述中尾鳍(23)相对于所述前尾鳍(22)的自由转动。
6.根据权利要求5所述的一种基于双轴舵机控制的仿生机器鱼装置,其特征在于:所述前尾鳍(22)与所述鱼身部件(12)之间间隙中设有防水垫,所述鱼身部件(12)与所述前尾鳍(22)之间通过螺丝固定。
7.根据权利要求6所述的一种基于双轴舵机控制的仿生机器鱼装置,其特征在于:所述后尾鳍(24)和所述中尾鳍(23)之间的连接结构与所述中尾鳍(23)与所述前尾鳍(22)之间的连接结构相同,所述中尾鳍(23)后端设有与所述前尾鳍(22)中相同的力传动圆盘(31),所述后尾鳍(24)前端设有与所述中尾鳍(23)内相同的中尾鳍(23)单轴舵机(6)。
8.根据权利要求6所述的一种基于双轴舵机控制的仿生机器鱼装置,其特征在于:所述后尾鳍(24)上通过螺丝固定由鱼尾拨板,用于增强仿生机器鱼的整体浮力和推进作用,所述鱼尾部件(14)通过组合摆动的中尾鳍(23)和后尾鳍(24)形成前进、后退、左转或右转的动作组。
9.根据权利要求1所述的一种基于双轴舵机控制的仿生机器鱼装置,其特征在于:所述鱼头部件(11)、所述鱼身部件(12)和所述鱼尾部件(14)均通过3d打印机以pla防水材料3d打印制得拼接,并通过m2螺丝连接固定。
10.根据权利要求5所述的一种基于双轴舵机控制的仿生机器鱼装置,其特征在于:所述arduino模块(16)、所述arduino扩展板块、所述双轴舵机(19)、两个所述单轴舵机(6)以及若干条用于连接上述模块的杜邦线组成arduino控制系统,用于分别控制所述胸鳍部件(13)和所述鱼尾部件(14)的摆动。
技术总结
本技术公开了一种基于双轴舵机控制的仿生机器鱼装置,涉及仿生机械技术领域,包括鱼头部件、鱼身部件以及鱼尾部件和胸鳍部件;鱼头部分前端内置有红外传感器,当红外传感器探测到障碍物时仿生机器鱼会控制尾部关节摆动从而进行避障;鱼身部件内置有与胸鳍部件相连的双轴舵机,通过改变胸鳍的角度来控制仿生机器鱼的上浮下沉,鱼身内还设有控制摆动组件、无线通信模块,Arduino模块、电池。鱼尾分为前尾鳍、中尾鳍、后尾鳍三部分,前两者中内置有防水舵机,尾鳍与中尾鳍固定连接;通过利用两个防水舵机实现对鱼尾的动作控制,进而实现对尾鳍的摆动方向和摆动频率的控制,最终实现仿生机器鱼的运动及转向,控制更加灵活,控制精度高。
技术研发人员:陈小军,陈召成,李德锦,吴逸生,倪伟森,莫德云,连海山
受保护的技术使用者:岭南师范学院
技术研发日:20221130
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!