一种基于蛇形机器人的水下桩基巡检系统
本发明涉及机器人控制领域,尤其涉及一种基于蛇形机器人的水下桩基巡检系统。
背景技术:
1、桩基作为桥梁、海上风电系统、钻井平台的重要结构组成部分,长期服役于水下,由于常受到水流冲刷以及船舶撞击,桩基表面容易产生裂缝和变形;此外,桩基因在水下时间过长其表面还容易有生物附着,为了延长桩基的寿命,确保其安全性和稳定性,需要定期对水下桩基表面进行巡检,现阶段通常利用相关检测装置执行巡检动作。
2、中国专利公开号:cn114379748a,公开了用于海上风电场水下桩基腐蚀情况监测的仿生机器鱼,包括仿生机器鱼本体,仿生机器鱼本体内规则布设有动力推进器、浮力调节器、沉浮气囊、空压机、处理器、电源管理器、多波束探测声呐、声速剖面仪,仿生机器鱼本体外设有测量船舶及其配备的主控机房和卫星基准/流动站。本发明设计可以实现原地下潜并自主巡航,减小风浪的影响;通过搭载多波束声呐,可以获取风电场水下的三维影像,准确量取风电场被腐蚀情况,并可快速准确地定制修复方案,降低风电场的运维管理成本。
3、可见,现有技术中还存在以下问题:
4、现有技术中,未考虑对桩基巡检时,机器人本体的稳定性,且现有技术受制于结构本身,不具备改变姿态的功能,不具备在狭小空间转向、调整姿态对桩基进行巡检的应用前景。
技术实现思路
1、为解决上述问题,本发明提供一种基于蛇形机器人的水下桩基巡检系统,其包括:
2、蛇形机器人,其由若干通过关节连接的连杆组成,各所述关节上设置有舵机,以通过舵机控制关节转动使蛇形机器人自由转变姿态,各所述连杆上套设有能自由旋转的套筒,所述套筒的两侧通过活动杆对称设置有侧翼推进器,以使所述侧翼推进器能自由改变推进方向,以通过各所述侧翼推进器带动蛇形机器人游动;
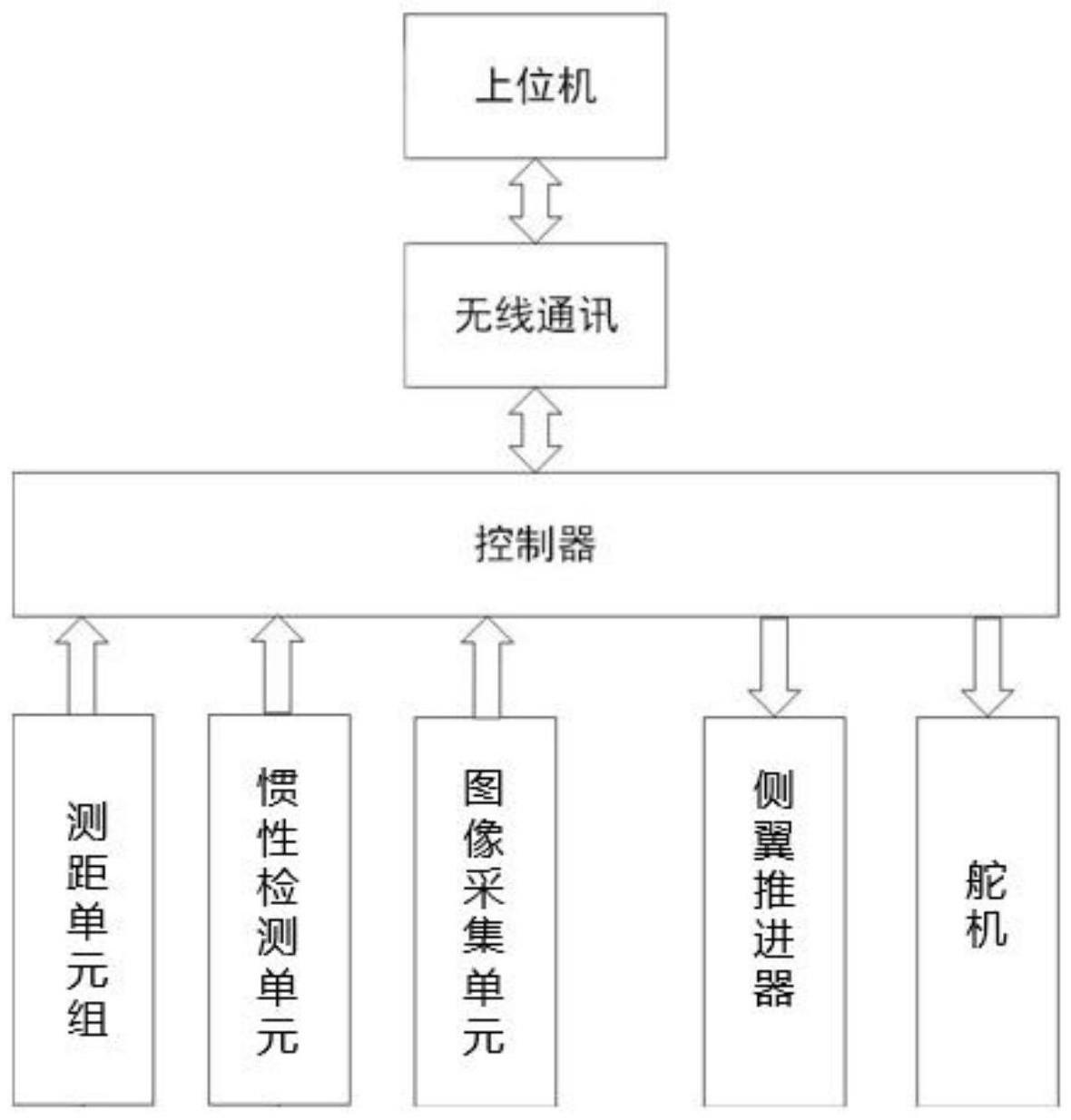
3、数据采集模块,其包括设置于所述蛇形机器人各连杆上的测距单元组、惯性检测单元以及图像采集单元;
4、控制器,其与侧翼推进器、数据采集模块以及舵机连接,用以基于控制指令控制所述侧翼推进器改变推进方向、控制所述舵机执行控制指令以及接收所述数据采集模块所发送的数据;
5、上位机,其与所述控制器连接,包括巡检控制单元、避障控制单元以及抗干扰单元,
6、所述巡检控制单元用以向控制器发送控制指令,控制所述蛇形机器人的各关节转动,使所述蛇形机器人的姿态由直线状转变为环形状,且,控制侧翼推进器改变推进方向,使所述蛇形机器人围绕所述桩基上升,完成巡检动作;
7、所述避障控制单元用以基于处于各连杆的测距单元组所发送的数据判定所述蛇形机器人移动方向上是否出现障碍,在出现障碍时向控制器发送控制指令,控制所述蛇形机器人各关节转动,使所述蛇形机器人改变姿态跨越所述障碍,完成避障动作;
8、所述抗干扰控制单元用以基于测距单元组所发送的数据确定所述蛇形机器人进行巡检动作时各连杆与所述桩基的最小距离,并通过向控制器发送控制指令控制侧翼推进器改变推进方向,使所述蛇形机器人的各连杆与所述桩基的最小距离维持在预设的安全距离区间内。
9、进一步地,所述测距单元组包括第一测距单元以及第二测距单元,所述第一测距单元用以检测连杆与桩基的距离,所述第二检测单元用以检测连杆与障碍的距离。
10、进一步地,所述巡检控制单元向所述控制器发送控制指令,控制所述蛇形机器人各关节转动以改变姿态,并且控制各所述侧翼推进器改变推进方向,使所述蛇形机器人围绕所述桩基上升,其中,
11、所述巡检控制单元使控制器控制所述蛇形机器人的各关节向靠近桩基一侧转动以使得所述蛇形机器人由直线状姿态改变为环形状姿态,并且控制各所述侧翼推进器改变推进方向,以使推进方向与水平面垂直。
12、进一步地,所述避障控制单元获取所述蛇形机器人位于各连杆的第二测距单元所检测的连杆与障碍的距离与预设的距离对比阈值进行对比,并根据对比结果判定所述蛇形机器人在移动方向上是否出现障碍,其中,
13、若存在第二测距单元所检测的距离小于所述距离对比阈值,则所述避障控制单元判定所述蛇形机器人在移动方向上出现障碍。
14、进一步地,所述避障控制单元向所述控制器发送控制指令,控制所述蛇形机器人各关节转动,完成避障动作,其中,
15、所述避障动作包括避障前动作、避障中动作以及避障后动作。
16、进一步地,所述避障控制单元向所述控制器发送控制指令,控制所述蛇形机器人各关节转动以及控制各侧翼推进器改变推进方向完成避障前动作,其中,
17、所述避障控制单元使控制器通过舵机控制各关节向远离所述桩基的一侧进行转动,直至各关节的相对转动角度为0,以使所述蛇形机器人恢复至直线状姿态,并且,控制各侧翼推进器改变推进方向使所述蛇形机器人远离所述桩基。
18、进一步地,所述避障控制单元向所述控制器发送控制指令,控制所述蛇形机器人各关节转动以及控制各侧翼推进器改变推进方向完成避障中动作,其中,
19、所述避障控制单元使控制器通过舵机控制各关节向靠近桩基一侧转动,以使所述蛇形机器人转变为弧形状姿态,并且,控制各所述连杆的侧翼推进器的推进方向与水平面垂直,使所述蛇形机器人以弧形状姿态沿所述桩基上升,直至所述蛇形机器人的形心与所述障碍处于同一水平面后控制所述蛇形机器人的头部的连杆以及尾部的连杆上的侧翼推进器改变推进方向,以使所述蛇形机器人围绕所述障碍旋转一周。
20、进一步地,所述避障控制单元向所述控制器发送控制指令,控制所述蛇形机器人各关节转动以及控制各侧翼推进器改变推进方向完成避障后动作,其中,
21、所述避障控制单元使控制器通过舵机控制各关节向远离桩基一侧转动,以使所述蛇形机器人恢复至直线状姿态后控制各所述连杆上的侧翼推进器转变推进方向,以使所述蛇形机器人继续沿桩基上升,直至所述蛇形机器人越过所述障碍后再次控制各所述连杆上的侧翼推进器转变推进方向,以使所述蛇形机器人靠近桩基后使控制器通过舵机控制各关节向靠近桩基一侧转动,以使所述蛇形机器人围绕所述桩基上升。
22、进一步地,所述抗干扰控制单元向控制器发送控制指令,控制侧翼推进器改变推进方向,使所述蛇形机器人的各连杆与所述桩基的最小距离维持在预设安全距离区间内,其中,
23、所述抗干扰控制单元实时获取各第一测距单元所检测的数据,并确定连杆与所述桩基的最小距离,并将所述最小距离与预设的安全距离区间进行对比,
24、若所述最小距离小于所述安全距离区间的区间下限,则所述抗干扰控制单元通过控制器控制所述连杆上的侧翼推进器改变推进方向,以使所述蛇形机器人远离所述桩基,直至所述连杆与所述桩基的距离处于所述预设安全距离区间。
25、进一步地,各所述连杆内还设置有电源。
26、与现有技术相比,本发明通过设置蛇形机器人、数据采集模块、控制器以及上位机,上位机向控制器发送控制指令,控制蛇形机器人的各关节转动,控制侧翼推进器改变推进方向,使蛇形机器人围绕桩基上升,基于处于各连杆的测距单元组所发送的数据判定蛇形机器人移动方向上是否出现障碍,在出现障碍时控制蛇形机器人各关节转动,使蛇形机器人改变姿态跨越障碍,基于测距单元组所发送的数据确定蛇形机器人进行巡检动作时各连杆与桩基的最小距离,控制侧翼推进器改变推进方向,使蛇形机器人的各连杆与桩基的最小距离维持在预设安全距离区间内,保证蛇形机器人巡检过程的适应性。
27、尤其,本发明中,巡检控制单元使蛇形机器人的姿态由直线状转变为环形状围绕桩基上升,在实际情况中,本技术利用蛇形机器人多自由度、运动灵活的特性,在巡检过程中,控制蛇形机器人成环形状围绕于待检测桩基之上,采用上升的方式围绕桩基进行巡检,由于蛇形机器人可以变换姿态,因此这种巡检方式也适用于桩基表面不平整以及存在障碍物或凸起的情况,并不局限于表面平整的桩基的巡检作业,提高了蛇形机器人巡检过程的适应性。
28、尤其,本发明中,避障控制单元在出现障碍时向控制器发送控制指令,控制蛇形机器人各关节转动,使蛇形机器人改变姿态跨越障碍,完成避障动作,在实际情况中,若障碍是桩基的一部分,蛇形机器人同样需要对障碍进行巡检,因此,本发明在对巡检过程出现障碍时,采取跨越障碍而不是避开障碍的方式,保证了蛇形机器人在有障碍情况时对水下桩基的巡检效果,从而保证巡检作业的完整性。
29、尤其,本发明中,避障控制单元完成避障中动作时首先使蛇形机器人转变为弧形状姿态,并在蛇形机器人的形心与障碍处于同一水平面后控制蛇形机器人围绕障碍旋转一周,在实际情况中,若桩基上出现障碍,蛇形机器人进行巡检时所成环形状的直径变大以使蛇形机器人变成首尾不相接的弧形状,若直接上升进行巡检会导致对部分位置的遗漏,因此在蛇形机器人的形心与障碍处于同一水平面后控制蛇形机器人围绕障碍旋转一周进行巡检,从而保证进行避障时的巡检效果。
30、尤其,本发明中,抗干扰控制单元根据蛇形机器人完成巡检动作时与桩基的最小距离改变侧翼推进器的推进方向,在实际情况中,受洋流冲击等情况的干扰,蛇形机器人在巡检过程中与桩基的距离会增大或减小,离桩基表面过远会影响巡检精度,离桩基表面过近则会与桩基相撞,因此,当蛇形机器人与桩基的距离过大或过小时需要改变侧翼推进器的推进方向,以使蛇形机器人与桩基的距离维持在预设安全距离区间内,保证了蛇形机器人在有干扰情况下对水下桩基进行巡检时的效果。
- 还没有人留言评论。精彩留言会获得点赞!