一种船体清理系统的制作方法
本发明涉及自动设备领域,更具体地,涉及一种船体清理系统。
背景技术:
1、大型船舶的水下船体会被海洋生物附着,轻度附着会增加航行油耗15%-20%,重度附着油耗会增加2-3倍,因此,船体附着物的清理作业属于船舶必要的常规保养。
2、船体壁面的海洋附着物以贝类尤其是藤壶等为主,具有附着力强,附着层坚硬,附着形状复杂等特性。传统的清理多为人工持械清理或采用遥控机器人操作,常用清理方式为接触式或射流式,其中接触式为:机器人安装旋转刷头清理附着物。主要表现在:a.清理过程容易损坏壁面涂层;b.方式单一,针对附着物复杂的情况,清理效果和效率难以保障,尤其是对于一些坚硬的贝类来说,清理效果很差。射流式:射流式分为水射流和喷砂(丸)。a,水射流为广泛使用的清洗方式:对壁面损伤小,细微面清洗效果较好,是目前应用广泛的一种清理方式。但由于壁面的附着物情况复杂,附着层对射流具有分流减压作用,尤其水下使用,降压明显,导致清理效果和作业效率低。
3、因此,需要一种新型的船体清理用机器人,能够解决上述问题。
技术实现思路
1、本发明的一个目的是提供一种船体清理的新技术方案。
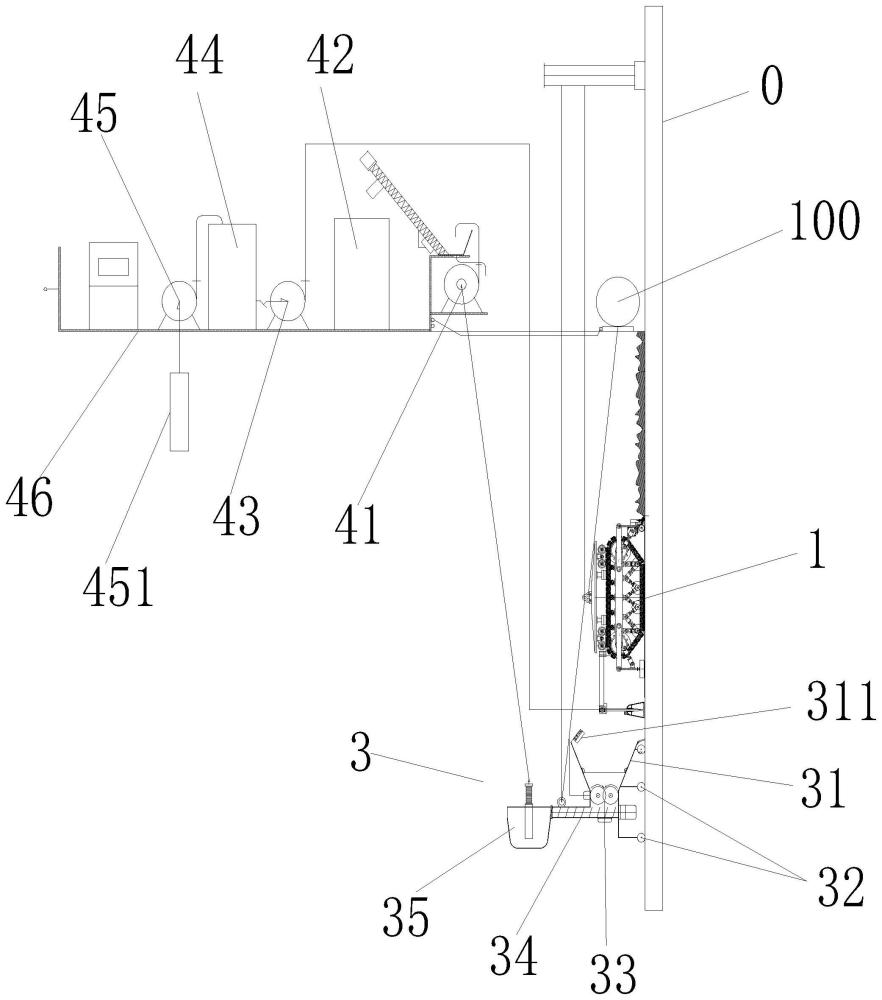
2、根据本发明的第一方面,提供了一种船体清理系统,包括清理机器人、清理物回收装置以及控制装置,所述控制装置控制所述清理机器人对船体外壁进行清理并控制所述清理物回收装置进行清理物的回收,所述清理机器人包括机器人本体以及安装至所述机器人本体上的清理机构,所述清理机构从前至后至少包括剪切机构、超声波清理机构以及射流机构;
3、所述清理物回收装置包括回收料斗、负压吸收器以及清理物处理装置,所述回收料斗设置于所述清理机器人的下方,所述负压吸收器至少设置于所述回收料斗底部,用于将清理物输送至所述清理物处理装置中。
4、通过本方案,清理机器人能够在船体表面行进,带动剪切机构利用机械方式剪切清理较大较厚的附着物,将之减薄,超声波清理机构对减薄以及贴附至船体表面的藻类进行超声清理,射流机构对清理过后的残渣进行冲刷,以进一步提高清理效果,将复杂的附着物分步骤清理成为标准化的壁面,分步骤清除掉附着物;
5、清理物回收装置能够将清理机器人清理下来的清理物进行回收并处理,避免清理物污染周边环境,提高清理效果。
6、优选地,所述机器人本体包括安装架以及行走机构,所述行走机构为双履带结构,所述双履带结构中的履带上设置有若干吸附板,所述吸附板能够贴合吸附至船体表面,所述吸附板中嵌装有吸附材料,所述吸附板以铰链结构对称安装在所述履带上,所述吸附板外包裹有弹性体材料。
7、通过本方案,吸附板能够将清理机器人吸附至船体表面,从而能够在船体底面进行清理,无需采用吊绳等工具吊装,而且能够保证清理机器人能够紧贴船体表面进行清理,提高清理效果;吸附板铰链结构能够贴合船体表面,并通过吸附材料进行吸附,适合平、曲面吸附,有利于履带适应复杂壁面,平衡双履带吸附强度,减少运行误差和转向困难问题。
8、优选地,所述所述剪切机构包括安装在剪切安装架上的剪切器以及剪切驱动装置,所述剪切器包括相互配合的固定刀以及活动刀,所述固定刀固定至所述剪切安装架上,所述活动刀横向滑动连接至所述剪切安装架上并由所述剪切驱动装置驱动左右移动;所述活动刀与所述固定刀的刀刃部均为锯齿形结构。
9、通过本方案,利用剪切器贴近船体表面,对附着物从根部侧面进行剪切清除,相较于钢刷挤压至船体表面的清理,不仅能够保护船体表面涂层,而且不受船体表面附着物的种类影响。
10、优选地,所述剪切安装架的底部设置有滚轮,所述滚轮通过微调机构与所述剪切安装板连接,所述微调机构用于调节所述滚轮的高度。
11、通过本方案,微调机构用于调节剪切刃口与壁面的间隙,可在3-10毫米范围内可调,确保刃口不划伤壁面,剪切后的附着层厚度均匀一致,使履带吸附力均匀,为机器人运行和后续设备提供标准。剪切后薄层在履带和壁面之间具有隔离作用,保护壁面,缓解履带的吸附阻力和转向困难问题,同时,履带运行对薄层附着物产生碾压剥离作用,更方便后续清理。
12、优选地,所述超声波清理机构通过超声调节架安装至所述安装架上,所述超声调节架与所述安装架转动连接,所述超声调节架用于带动所述超声波清理机构到达工作位或非工作位。
13、通过本方案,超声波清理机构能够根据需要转动至清理机器人的顶部,以方便清理机器人的越障移动,或者根据实际清理需求进行调整(如剪切清理或喷砂清理)。
14、优选地,所述射流机构包括高压冲洗枪以及射流保护罩,所述射流保护罩环绕所述高压冲洗枪布置,所述射流保护罩上通过负压回收管连通所述负压吸收器。
15、通过本方案,射流保护罩用于保障射流区域安全和减少射流水域对射流的压力影响,同时对射流区域形成引流集束作用,利于清理物的集中回收。
16、优选地,所述回收料斗包括料斗、破碎装置以及收集罐,所述料斗通过所述破碎装置连接至所述收集罐,至少所述料斗上设置有若干磁力轮,所述料斗通过所述磁力轮吸附至所述清理机器人下方的船体上。
17、通过本方案,料斗能够收集清理机器人清理后掉落的残渣,由破碎装置破碎成小颗粒后输送至收集罐中回收处理;磁力轮能够吸附至船体上,随机器人的移动而移动,保持较佳的收集位置。
18、优选地,所述破碎装置为设置于所述料斗底部的破碎机,所述破碎机通过螺旋送料器连接至所述收集罐,所述收集罐通过柔性连接器与所述负压吸收器连接,所述负压吸收器与工作船上的清理物回收罐连接。
19、通过本方案,螺旋输送器对收集罐和料斗进行刚性的连接,提高回收料斗的整体性,能够同步的随清理机器人进行移动,提高回收效果;负压吸收器通过收集罐至料斗的连通,在料斗部位形成负压区,便于收集清理物残渣,在收集罐中的残渣能够在负压吸收器的作用下传输至工作船上,进行集中回收处理。
20、优选地,所述清理物处理装置包括安装至工作船上的清理物回收罐、储水罐、高压水泵以及抽水泵,所述抽水泵一端通过过滤器延伸至所述工作船的下方,所述抽水泵另一端连通至所述储水罐;所述高压水泵一端连通至所述储水罐,另一端连通至所述射流机构。
21、通过本方案,高压水泵能够向射流机构提供高压水,以进行冲刷处理;抽水泵能够直接吸取工作船下方的海水为储水罐供水,保持不间断的射流冲刷作业用。
22、根据本发明的第二方面,提供一种船体清理方法,采用上述的船体清理系统,包括如下步骤:
23、清理机器人运行至船体表面待清理位置,依次进行剪切清理、超声波清理以及射流冲刷;
24、清理物通过回收料斗以及负压吸收器输送至清理物回收装置对清理物进行处理。
25、根据本公开的一个实施例,利用本系统中的清理机器人,实现剪切清理、超声波清理和射流冲刷,形成三步法组合清理方式。三种清理方式优化组合,优势互补,刚柔相济,能够清理绝大部分附着物,而且,能为机器人平稳运行提供有利条件。同理,机器人平稳运行也为清理作业提供保障。
26、三步法组合清理方式,清理过程不探测和不计算附着物厚度和成分,运行中不损伤壁面,简化检测设备,实用性强。此种组合清理方式体现出本发明机器人可同时携带多种装备实施作业的载体型设备优势。
27、三步法组合清理方式的优势:按照作业条件配备专用设备,以本发明机器人为载体,将复杂的附着物分步骤清理成为标准化的壁面,分步骤清除掉附着物,此方式不但能实现一次性,高效率完成清理作业,而且为实现自动化作业和清理物集中回收创造有利条件。
28、本系统不仅能够完成船体表面海洋生物附着的清理、回收处理;通过在射流机构上安装喷砂枪、喷涂枪后,还能够针对船体表面锈蚀进行处理,或者对船体表面进行重新喷涂作业,大大提高了本系统的应用范围。
29、通过以下参照附图对本发明的示例性实施例的详细描述,本发明的其它特征及其优点将会变得清楚。
- 还没有人留言评论。精彩留言会获得点赞!