一种新型无人遥控潜水器推进器的制作方法
本发明涉及无人遥控潜水器,尤其涉及一种新型无人遥控潜水器推进器。
背景技术:
1、遥控无人潜水器,英文名简写为rov,目前主要的应用方向有两种:第一种是搭载各种机械臂、声呐、检测仪器等设备,潜入水下执行检测、抓取任务,此类应用的rov需要多个竖直推进器,来增加其载重能力,并且多个竖直推进器在增加了配件之后可调节姿态(如前后的两个竖直推进器调节俯仰姿态,左右的两个竖直推进器调节横滚姿态);第二种是只搭载摄像头与小型声呐,要求在水中快速移动到指定区域进行搜寻或搜救,此类应用的rov需要大推力或者多个水平推进器来增加水平运动的速度。
2、为了能够充分适用上述两种用途,现有的新型无人遥控潜水器推进器使用了四个水平推进器、两个固定的竖直推进器和两个可转动调节的竖直推进器,通过转动调节将两个竖直推进器调整为水平状态,使得该无人遥控潜水器具有“4+4(四个水平方向和四个竖直方向)”和“6+2(六个水平方向和两个竖直方向)”两种推进器布局模式,但是在使用过程中,推进器需要安装固定在机体上,因此在将其中两个竖直推进器切换为水平状态时,需要先将其拆卸下来,然后换个角度重新安装,无法在不解除安装的情况下进行竖直状态和水平状态之间的切换调整,因此使用起来非常的不方便。
技术实现思路
1、本发明的目的是为了解决现有技术中存在的缺点,如:但是在使用过程中,推进器需要安装固定在机体上,因此在将其中两个竖直推进器切换为水平状态时,需要先将其拆卸下来,然后换个角度重新安装,无法在不解除安装的情况下进行竖直状态和水平状态之间的切换调整,因此使用起来非常的不方便。
2、为了实现上述目的,本发明采用了如下技术方案:
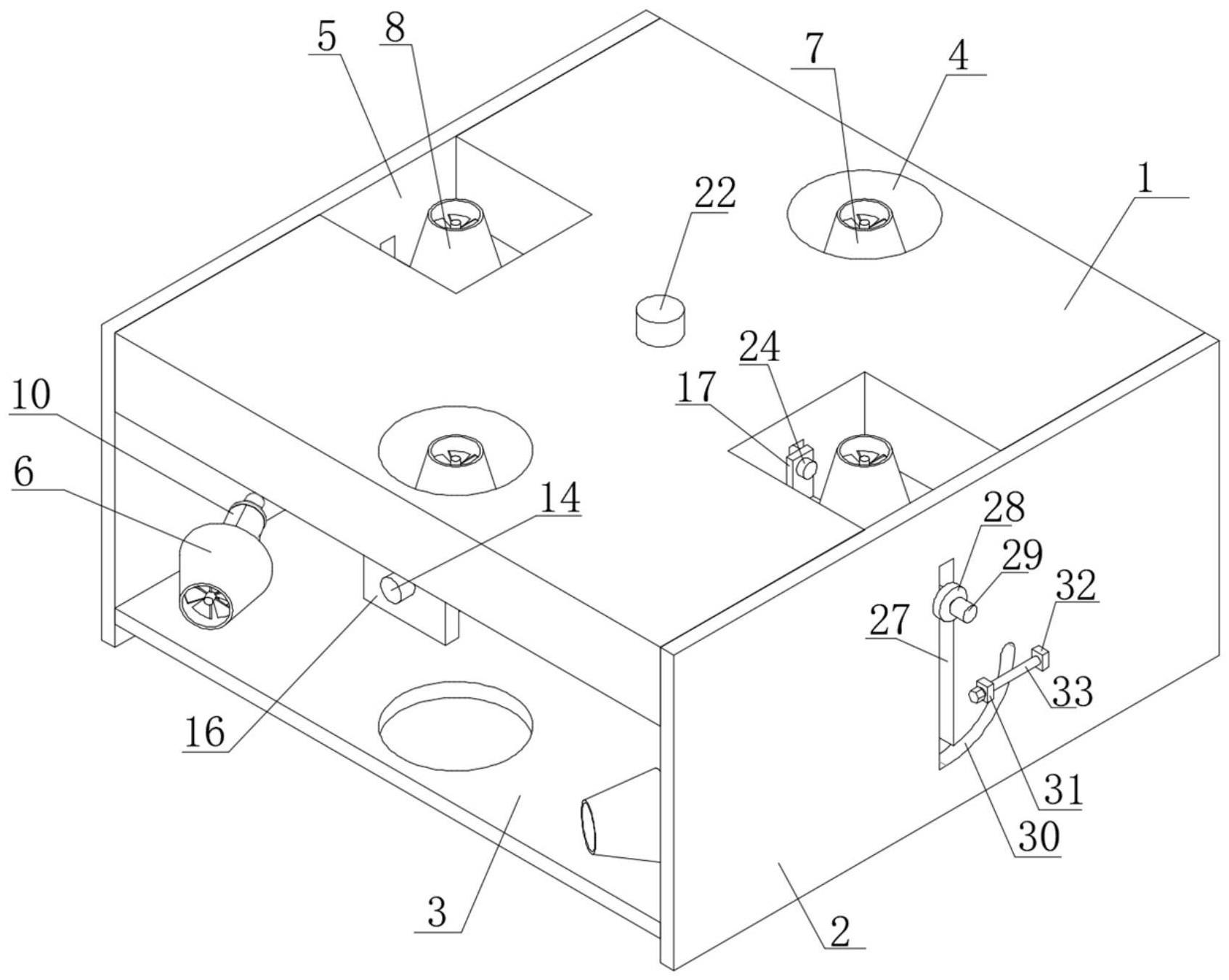
3、一种新型无人遥控潜水器推进器,包括机体,所述机体的外侧壁上对称固定连接有两个挡板,所述机体的底端上安装有底板,所述机体上分别设有两个第一空槽和两个第二空槽,所述底板上安装有四个水平推进器,所述第一空槽内安装有第一竖直推进器,所述第二空槽内安装有第二竖直推进器,所述水平推进器、第一竖直推进器和第二竖直推进器的外侧壁上均设有卡槽,所述水平推进器和第一竖直推进器上均设有固定式安装组件,所述第二竖直推进器上设有切换式安装组件,所述切换式安装组件包括第一卡持板和第二卡持板,所述第一卡持板和第二卡持板均卡接在第二竖直推进器上的卡槽内,所述机体内设有相互连通的空腔和导向槽,所述空腔内设有第二螺纹杆,所述第二螺纹杆的一端贯穿机体且其上固定连接有第二把手;
4、所述第二螺纹杆上螺纹连接有滑块,所述滑块滑动连接在空腔内,所述滑块的外侧壁上固定连接有连接板,所述连接板滑动连接在导向槽内,所述连接板靠近第一卡持板的一端呈圆柱形设置,所述连接板的圆柱端贯穿第一卡持板并与第一卡持板转动连接,所述第二卡持板的外侧壁上固定连接有螺纹管,所述螺纹管的外侧壁上滑动连接有限位管,所述挡板上设有限位槽,所述限位槽内滑动连接有限位板,所述限位板与限位管固定连接,所述限位板内螺纹连接有贯穿限位板和限位管的第三把手,所述第三把手的一端螺纹连接在螺纹管内,所述限位槽上设有弧形槽,所述挡板上设有限位装置。
5、优选的,所述固定式安装组件包括两个卡件,两个所述卡件均卡接在卡槽内,所述卡件上固定连接有压杆,所述压杆上设有安装块,两个所述压杆均滑动连接在安装块内,所述安装块内转动连接有第一螺纹杆,所述第一螺纹杆的一端上固定连接有第一把手,所述安装块内滑动连接有压块,所述压块与第一螺纹杆螺纹连接,所述压杆上设有压槽,所述压槽的一侧壁乘倾斜设置,所述压块靠近压杆的一端与压槽呈匹配设置。
6、优选的,所述机体靠近底板的一侧壁上固定连接有安装板,多个所述安装块分别固定连接在底板和安装板上,所述底板和安装板上均设有安装孔,所述第一螺纹杆转动连接在安装孔内。
7、优选的,所述限位装置包括固定连接在挡板外侧壁上的滑槽和螺纹套,所述滑槽内滑动连接有定位螺栓,所述定位螺栓的一端与螺纹套螺纹连接。
8、优选的,所述水平推进器、第一竖直推进器和第二竖直推进器的一端的外侧壁上通过固定杆固定连接有聚流罩,所述聚流罩呈收束状设置。
9、优选的,所述底板上分别设有两个第一通槽和第二通槽,所述第一通槽正对第一空槽设置,所述第二通槽正对第二空槽设置。
10、本发明的有益效果是:
11、1、先沿限位槽方向将第二竖直推进器移动到最底端,然后沿弧形槽方向拉动第三把手,即可在不解除对第二竖直推进器的安装的前提得下,将第二竖直推进器由竖直状态切换为水平状态,由于两个第二竖直推进器能够方便的在竖直状态和水平状态之间进行切换,因此本发明能够根据使用需要在“4+4模式”和“6+2”模式之间进行切换。
12、2、由于压杆上压槽的一侧壁呈倾斜设置,且压块靠近压槽一端的一侧壁与压槽呈匹配设置,因此在压块对压槽施加压力作用时,借助倾斜侧壁之间的挤压,对两个压杆具有使其相互靠近的压力作用,从而在通过压块对压杆进行压紧的过程中还能通过压杆带动两个卡件紧紧贴合在卡槽内,增强对水平推进器或第一竖直推进器安装固定的效果,固定牢固,且仅需单螺纹连接关系即可完成安装固定,因此操作简单使用方便。
技术特征:
1.一种新型无人遥控潜水器推进器,包括机体(1),其特征在于,所述机体(1)的外侧壁上对称固定连接有两个挡板(2),所述机体(1)的底端上安装有底板(3),所述机体(1)上分别设有两个第一空槽(4)和两个第二空槽(5),所述底板(3)上安装有四个水平推进器(6),所述第一空槽(4)内安装有第一竖直推进器(7),所述第二空槽(5)内安装有第二竖直推进器(8),所述水平推进器(6)、第一竖直推进器(7)和第二竖直推进器(8)的外侧壁上均设有卡槽(9),所述水平推进器(6)和第一竖直推进器(7)上均设有固定式安装组件,所述第二竖直推进器(8)上设有切换式安装组件,所述切换式安装组件包括第一卡持板(17)和第二卡持板(18),所述第一卡持板(17)和第二卡持板(18)均卡接在第二竖直推进器(8)上的卡槽(9)内,所述机体(1)内设有相互连通的空腔(19)和导向槽(20),所述空腔(19)内设有第二螺纹杆(21),所述第二螺纹杆(21)的一端贯穿机体(1)且其上固定连接有第二把手(22);
2.根据权利要求1所述的一种新型无人遥控潜水器推进器,其特征在于,所述固定式安装组件包括两个卡件(10),两个所述卡件(10)均卡接在卡槽(9)内,所述卡件(10)上固定连接有压杆(11),所述压杆(11)上设有安装块(12),两个所述压杆(11)均滑动连接在安装块(12)内,所述安装块(12)内转动连接有第一螺纹杆(13),所述第一螺纹杆(13)的一端上固定连接有第一把手(14),所述安装块(12)内滑动连接有压块(15),所述压块(15)与第一螺纹杆(13)螺纹连接,所述压杆(11)上设有压槽,所述压槽的一侧壁乘倾斜设置,所述压块(15)靠近压杆(11)的一端与压槽呈匹配设置。
3.根据权利要求2所述的一种新型无人遥控潜水器推进器,其特征在于,所述机体(1)靠近底板(3)的一侧壁上固定连接有安装板(16),多个所述安装块(12)分别固定连接在底板(3)和安装板(16)上,所述底板(3)和安装板(16)上均设有安装孔,所述第一螺纹杆(13)转动连接在安装孔内。
4.根据权利要求1所述的一种新型无人遥控潜水器推进器,其特征在于,所述限位装置包括固定连接在挡板(2)外侧壁上的滑槽(31)和螺纹套(32),所述滑槽(31)内滑动连接有定位螺栓(33),所述定位螺栓(33)的一端与螺纹套(32)螺纹连接。
5.根据权利要求1所述的一种新型无人遥控潜水器推进器,其特征在于,所述水平推进器(6)、第一竖直推进器(7)和第二竖直推进器(8)的一端的外侧壁上通过固定杆固定连接有聚流罩,所述聚流罩呈收束状设置。
6.根据权利要求1所述的一种新型无人遥控潜水器推进器,其特征在于,所述底板(3)上分别设有两个第一通槽和第二通槽,所述第一通槽正对第一空槽(4)设置,所述第二通槽正对第二空槽(5)设置。
技术总结
本发明公开了一种新型无人遥控潜水器推进器,包括机体,所述机体的外侧壁上对称固定连接有两个挡板,所述机体的底端上安装有底板,所述机体上分别设有两个第一空槽和两个第二空槽,所述底板上安装有四个水平推进器,所述第一空槽内安装有第一竖直推进器,所述第二空槽内安装有第二竖直推进器。本发明先沿限位槽方向将第二竖直推进器移动到最底端,然后沿弧形槽方向拉动第三把手,即可在不解除对第二竖直推进器的安装的前提得下,将第二竖直推进器由竖直状态切换为水平状态,由于两个第二竖直推进器能够方便的在竖直状态和水平状态之间进行切换,因此本发明能够根据使用需要在“4+4模式”和“6+2”模式之间进行切换。
技术研发人员:蒋得成,李浩怡
受保护的技术使用者:蒋得成
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!