一种海洋装备用无人船
本发明涉及海洋装备,具体地说是涉及一种海洋装备用无人船。
背景技术:
1、目前,海洋观测越来越多的以海上无人系统为主。海上无人系统在执行任务前需要安全布放,并且在完成任务返航后需要及时可靠回收。布放与回收都是在母船上完成,现有吊放式与滑道式两种实现方式。
2、吊放式是目前无人系统布放和回收应用最多的形式,采用线缆系留的方式连接到海上无人系统,然后利用母船上安装的起重机械提起或降下海上无人系统。吊放式需要母船停船静止,对海况要求高(恶劣海况很难完成回收),并且需要多人协助、人工解挂钩等操作,自主化程度低,安全性差,不适用于复杂海况下无人系统的布放与回收等。滑道式是在母船的艉部设置较长的斜坡滑道,在回收时,海上无人系统通过实时引导,选择合适的时机,以高于母船的航速冲入艉部滑道,实现回收。滑道式在母船与海上无人系统对接引导过程中,需人工辅助遥控操作以克服尾流和海浪的影响,高海况下母船剧烈运动,艉部升起离开水面,无人系统很难进入滑道,自主性较弱。而且滑道式需在母船艉部设置开口,占用空间,增加了母船设计的难度。
技术实现思路
1、基于上述技术问题,本发明提出一种海洋装备用无人船。
2、本发明所采用的技术解决方案是:
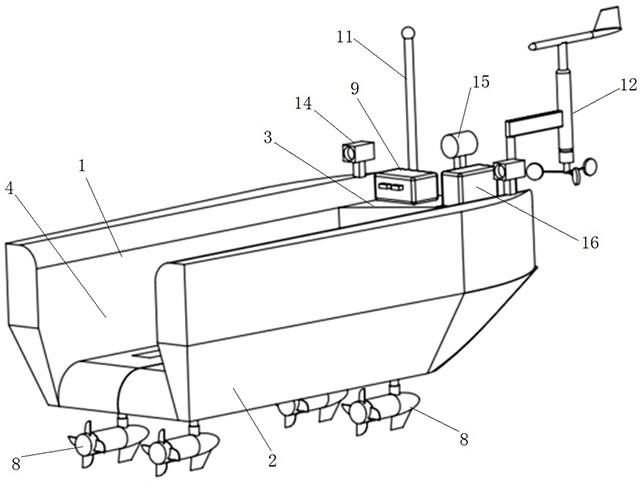
3、一种海洋装备用无人船,包括船体侧舷和压载舱,船体侧舷设置在压载舱的上部,在船体侧舷和压载舱的前端设置有前挡部,船体侧舷、压载舱和前挡部围拢形成用于放置海上无人系统的u型空间,在船体侧舷和压载舱的尾端留设有用于海上无人系统进出u型空间的敞口;
4、该无人船包括两个半船体;相应地,所述压载舱包括第一舱体和第二舱体,所述前挡部包括第一挡块和第二挡块;所述船体侧舷设置两个,其中一个船体侧舷与第一舱体和第一挡块连接形成其中一个半船体,另一个船体侧舷与第二舱体和第二挡块连接形成另一个半船体;
5、在第一舱体和第二舱体之间设置有能够调节第一舱体和第二舱体之间间距的连接件;在第一舱体和第二舱体的底部均设置有用于推动其自主移动的全回转推进器。
6、优选的,在前挡部处设置有定位通信天线和控制系统,定位通信天线和全回转推进器均与控制系统连接。
7、优选的,所述两个半船体呈对称布置;
8、所述第一舱体和第二舱体底部设置的全回转推进器的个数相等,且第一舱体和第二舱体底部的全回转推进器安装位置呈对称分布。
9、优选的,所述全回转推进器包括推进器本体,在推进器本体的尾部设置有桨叶;在推进器本体上还安装有电机,电机的转轴呈竖向布置,在电机的转轴末端连接固定盘,固定盘安装在第一舱体或第二舱体的底部。
10、优选的,所述连接件为连接横梁,连接横梁包括横梁主体,在横梁主体的两端设置有端板,端板的表面积大于横梁主体的截面积;
11、在第一舱体和第二舱体上均设置有竖向贯通的通孔,在第一舱体和第二舱体的相向内侧均设置有穿孔,穿孔与通孔相连通;所述横梁主体从穿孔中穿过,且端板卡入通孔中。
12、优选的,所述前挡部的内侧面设置有磁体,在海上无人系统的头部设置有与磁体相配合的亲磁金属块。
13、优选的,该无人船上还设置有传感器模块,所述传感器模块包括风速传感器和浪流传感器,风速传感器和浪流传感器均与控制系统连接。
14、优选的,在船体侧舷的端部还设置有用于发射激光束的激光雷达,激光雷达与控制系统连接。
15、优选的,该无人船上还设置有用以实现与海上无人系统远距离对接引导的光源。
16、本发明的有益技术效果如下:
17、第一,本发明无人船机动性强、自主化程度高、无需操作人员的介入;第二,本发明无人船具有自主航行接驳能力,可自主实现动力定位,姿态控制稳定,回收海上无人系统快速、效率高;第三,本发明无人船配备有压载舱,可实现沉浮,克服尾流和海浪的影响,提高回收海上无人系统的效率;第四,本发明无人船可以变形,以适应不同大小和结构的海上无人系统应用;第五,本发明无人船还配备有激光雷达和光源等,可实现对海上无人系统的引导及精准对接,回收效率高。
技术特征:
1.一种海洋装备用无人船,其特征在于:包括船体侧舷和压载舱,船体侧舷设置在压载舱的上部,在船体侧舷和压载舱的前端设置有前挡部,船体侧舷、压载舱和前挡部围拢形成用于放置海上无人系统的u型空间,在船体侧舷和压载舱的尾端留设有用于海上无人系统进出u型空间的敞口;
2.根据权利要求1所述的一种海洋装备用无人船,其特征在于:在前挡部处设置有定位通信天线和控制系统,定位通信天线和全回转推进器均与控制系统连接。
3.根据权利要求1所述的一种海洋装备用无人船,其特征在于:所述两个半船体呈对称布置;
4.根据权利要求1所述的一种海洋装备用无人船,其特征在于:所述全回转推进器包括推进器本体,在推进器本体的尾部设置有桨叶;在推进器本体上还安装有电机,电机的转轴呈竖向布置,在电机的转轴末端连接固定盘,固定盘安装在第一舱体或第二舱体的底部。
5.根据权利要求1所述的一种海洋装备用无人船,其特征在于:所述连接件为连接横梁,连接横梁包括横梁主体,在横梁主体的两端设置有端板,端板的表面积大于横梁主体的截面积;
6.根据权利要求1所述的一种海洋装备用无人船,其特征在于:所述前挡部的内侧面设置有磁体,在海上无人系统的头部设置有与磁体相配合的亲磁金属块。
7.根据权利要求2所述的一种海洋装备用无人船,其特征在于:该无人船上还设置有传感器模块,所述传感器模块包括风速传感器和浪流传感器,风速传感器和浪流传感器均与控制系统连接。
8.根据权利要求2所述的一种海洋装备用无人船,其特征在于:在船体侧舷的端部还设置有用于发射激光束的激光雷达,激光雷达与控制系统连接。
9.根据权利要求1所述的一种海洋装备用无人船,其特征在于:该无人船上还设置有用以实现与海上无人系统远距离对接引导的光源。
技术总结
本发明公开一种海洋装备用无人船,属于海洋装备技术领域,该无人船包括船体侧舷和压载舱,船体侧舷设置在压载舱的上部,在船体侧舷和压载舱的前端设置有前挡部,船体侧舷、压载舱和前挡部围拢形成用于放置海上无人系统的U型空间,在船体侧舷和压载舱的尾端留设有用于海上无人系统进出U型空间的敞口;该无人船包括两个半船体;相应地,所述压载舱包括第一舱体和第二舱体;在第一舱体和第二舱体之间设置有连接件;在第一舱体和第二舱体的底部均设置有用于推动其自主移动的全回转推进器。本发明无人船具有自主航行接驳能力,可自主实现动力定位,姿态控制稳定,可快速高效回收海上无人系统,机动性强、自主化程度高、无需操作人员的介入。
技术研发人员:乜云利,周兴华,王胜利,龙淼,姜迁里,刘霞
受保护的技术使用者:山东科技大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!