潜航器搭载集群无人机装置
本发明涉及潜航器分体跨介质领域,更具体地说,涉及一种潜航器搭载集群无人机装置。
背景技术:
1、无人机具有响应速度快、机动能力强,视野广阔、低成本和高效费比的优势。无人驾驶飞机军用可作为侦察机和靶机,民用可应用于航拍、农业、快递运输、灾难救援、监控、测绘、新闻报道、电力巡检、救灾等领域。在目前的海上作业中,无人机的引入不仅保证了工作人员的安全,同样也使得整个作业过程变得更加顺利。由多架无人机组成的无人机集群可以通过感知交互、信息传递实现协同工作,实现低成本完成多任务。同时,针对不同类型的工作目标,无人系统集群可利用混合搭配的异构优势低成本、高效率的完成工作。但目前由于海上作业无人机续航能力严重不足,且无法适应海上复杂环境,一直难以布置在远洋区域,无法为远洋工程提供助力。
2、水下-空中跨介质两栖潜航器是指能够实现水下潜航和空中飞行的两栖航行器,兼有飞行器的速度和潜航器的隐蔽性,可获取空中、水面、水下等信息。水下潜航器可以长时间、高密度地侦察搜集水中情报,多应用于近海石油调查、通信线路检查、军事应用以及深海探测打捞,将跨介质潜航器搭载于海洋装备或作为空、天、海体系中的一员与海洋装备配合,将极大提高海洋装备系统的综合作业能力。
3、现有的跨介质航行器技术大多为水面舰艇搭载舰载机,发展集群化、自主化、智能化的无人机集群是其未来的重要发展方向。相对单个无人机系统,多架无人机协同的方式可以利用无人机通讯,进行信息共享,扩大对环境态势的感知,实现协同任务分配、协同搜索、侦察与攻击,能有效提高无人机的生存能力和整体作战效能。也可利用其规模优势,完成复杂任务,使作战系统更具强生存能力和成本优势。
4、无人机内部构造复杂,传感器较多,导致功耗较高、续航时间较短,在执行海上任务时难以得到保障,难以进行较大范围内作业,飞行距离和飞行时间受到较大限制。在无人机收发过程中,由于海上风浪较大,船体产生晃动,无人机着陆平台面积很小,现有的无人机场对无人机着陆的准确性要求很高。且现有的潜航器无人机存储结构多为单个无人机收发,存放无人机数量少,易造成潜艇内部空间和资源的浪费。在集群存储的要求下,还需要考虑储存舱、压载水、电池仓等基础功能结构的合理分配,远洋作业过程中无人机续航不足、难以应对复杂海况。
技术实现思路
1、本发明要解决的技术问题在于,提供一种潜航器搭载集群无人机装置,其克服了跨介质难点,通过“潜航器+飞行器”的分体结构融合了无人机的集群作业能力和潜航器的隐蔽性,能够为无人机作业提供安全保障和续航保障,使得无人机能够安全应用于远洋作业过程,对于实现远洋作业无人化、智能化,具有较大的现实意义。
2、本发明解决其技术问题所采用的技术方案是:构造一种潜航器搭载集群无人机装置,包括潜航器姿态控制模块、潜航器运动补偿模块、无人机自动收发模块、无人机蜂巢储存模块;所述潜航器姿态控制模块设置在潜航器侧面和中部,所述无人机运动补偿模块设置在潜航器顶部,所述无人机自动收发模块设置在潜航器内部上方,所述无人机蜂巢储存模块设置在潜航器中心和侧面,潜航器姿态控制模块分布于无人机蜂巢储存模块外侧,所述无人机自动收发模块设置在无人机蜂巢储存模块上方;
3、所述潜航器姿态控制模块用于调节潜航器重量,实现潜航器的快速上浮下潜,改变潜航器的重心位置,实现潜航器姿态的相互切换,辅助调整姿态;
4、潜航器运动补偿模块用于进行集成稳性计算,控制潜航器基础稳性;
5、无人机自动收发模块用于向无人机与潜航器同时发出无人机回收指令;
6、无人机蜂巢储存模块用于集群储存无人机,在风浪环境下实现对无人机的保护。
7、按上述方案,所述潜航器姿态控制模块包括压载水舱、压载水泵、双向阀和滑移电池仓;所述压载水舱设置在潜航器底面两侧,所述压载水泵与压载水舱连接,所述双向阀设置在压载水泵上控制压载水泵的开关,所述滑移电池仓设置在潜航器中部。
8、按上述方案,所述潜航器运动补偿模块包括万向螺旋桨,所述万向螺旋桨设置在潜航器顶部,所述万向螺旋桨用于给潜航器提供动力。
9、按上述方案,所述无人机自动收发模块包括无人机悬浮平台、电动滑轨、回收圆盘、电磁基座、锚定钩爪、柔性通道、卷线器、缆绳和锚定小球;所述无人机悬浮平台设置在潜航器顶部,所述无人机悬浮平台用于搭载无人机,所述电动滑轨设置在升降托盘和滑移电池仓之间,所述电磁基座和锚定钩爪设置在无人机悬浮平台,所述柔性通道位于潜航器中心,所述卷线器设置在无人机下方,所述缆绳设置在卷线器上,所述锚定小球设置在缆绳末端。
10、按上述方案,所述无人机蜂巢储存模块包括升降托盘、自由度调节装置、电推斜面、无人机储存舱;所述升降托盘设置在潜航器中心,所述自由度调节装置和电推斜面设置在升降托盘侧边,所述无人机储存舱设置在潜航器侧面。
11、按上述方案,所述柔性通道由非弹性软材料构。
12、实施本发明的潜航器搭载集群无人机装置,具有以下有益效果:
13、1、本发明结合集群存储无人机的功能要求,提出了一种安全高效的无人机回收方式,回收平台采用无人机构型,将无人机采用的多旋翼技术采用到回收平台中,使得无人机回收平台拥有了能在空中运动的能力。形成了相较于单独的升降托盘更大面积的无人机着陆平台,使无人机能够更容易着陆,降低了无人机着陆的要求,提高了准确性。整个回收模块的设计可防止恶劣海况下的海浪影响无人机回收,也能极大地减缓回收过程产生的碰撞;
14、2、本发明基于潜航器的内部空间结构特点,提出了一种可集群储存无人机的结构,通过多层多列无人机储存舱,实现对若干架无人机的存储,通过升降托盘自由度调节装置、转升降托盘、横向推杆等结构配合工作,实现无人机的升起放飞或降落存放;整个装置通过集成多层无人机机舱实现了无人机集群存储,避免了空间和资源的浪费;未来可利用集群无人机间的通信网络实现协同侦察、协同打击、协同干扰等功能,可有效应用于远程突防、战机护航等作战任务;
15、3、本发明综合考虑压载功能和存储功能的共性要求,提出了复杂载荷作用下潜航器水面稳性技术并对压载水舱结构进行优化设计,当无人潜航器在水面进行无人机回收时,可通过控制压载水舱注水量,并结合螺旋桨的方向与转速对潜航器舱体进行运动补偿,增强了潜航器在浮出水面姿态下受到风载和浪载作用时的潜航器稳性,也可有效保证潜航器在回收状态时的水面稳定性。
技术特征:
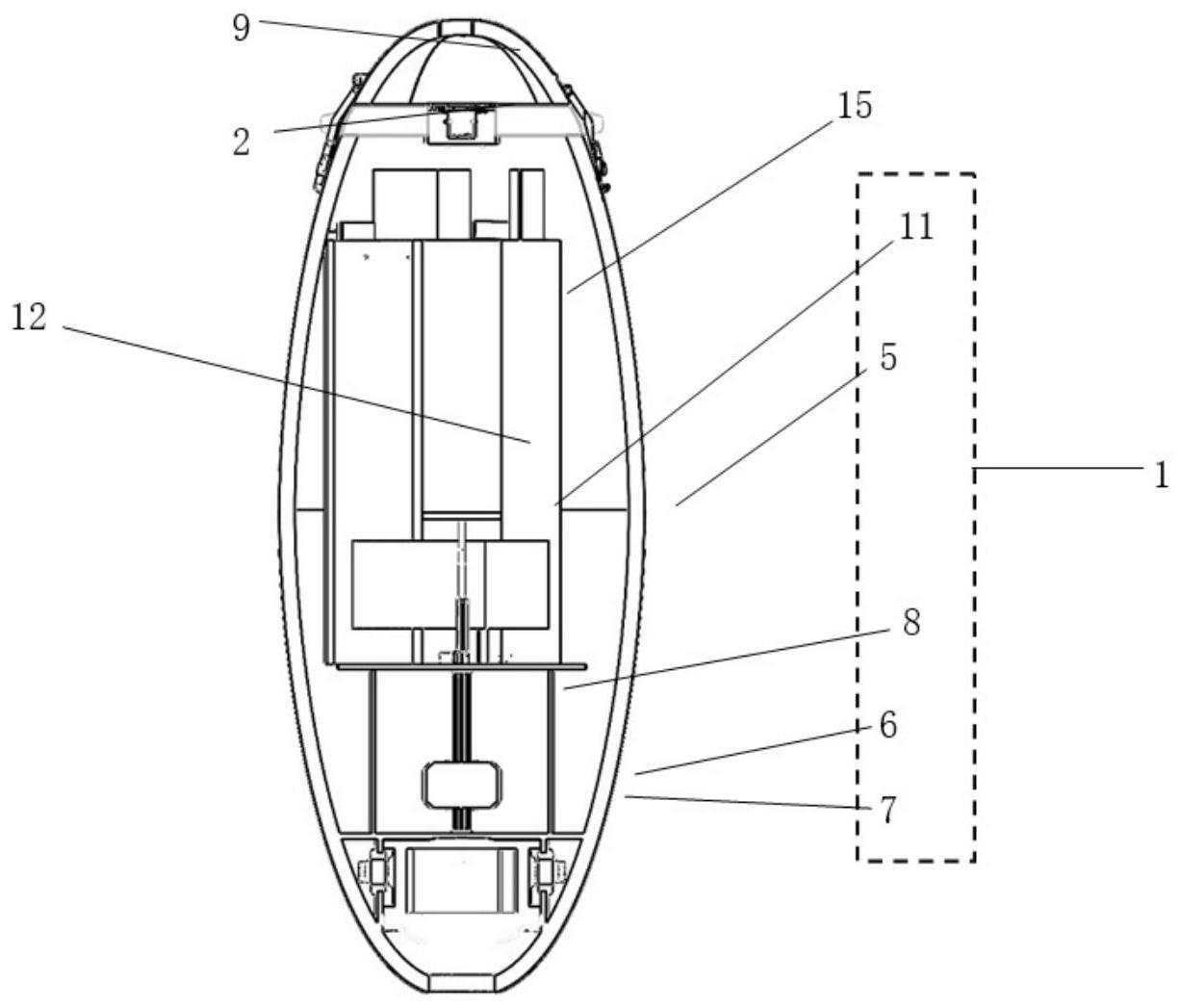
1.一种潜航器搭载集群无人机装置,其特征在于,包括潜航器姿态控制模块(1)、潜航器运动补偿模块(2)、无人机自动收发模块(3)、无人机蜂巢储存模块(4);所述潜航器姿态控制模块(1)设置在潜航器侧面和中部,所述无人机运动补偿模块(2)设置在潜航器顶部,所述无人机自动收发模块(3)设置在潜航器内部上方,所述无人机蜂巢储存模块(4)设置在潜航器中心和侧面,潜航器姿态控制模块(1)分布于无人机蜂巢储存模块(4)外侧,所述无人机自动收发模块(3)设置在无人机蜂巢储存模块(4)上方;
2.根据权利要求1所述的潜航器搭载集群无人机装置,其特征在于,所述潜航器姿态控制模块(1)包括压载水舱(5)、压载水泵(6)、双向阀(7)和滑移电池仓(8);所述压载水舱(5)设置在潜航器底面两侧,所述压载水泵(6)与压载水舱(5)连接,所述双向阀(7)设置在压载水泵(6)上控制压载水泵(6)的开关,所述滑移电池仓(8)设置在潜航器中部。
3.根据权利要求1所述的潜航器搭载集群无人机装置,其特征在于,所述潜航器运动补偿模块(2)包括万向螺旋桨(9),所述万向螺旋桨(9)设置在潜航器顶部,所述万向螺旋桨(9)用于给潜航器提供动力。
4.根据权利要求1所述的潜航器搭载集群无人机装置,其特征在于,所述无人机自动收发模块(3)包括无人机悬浮平台(10)、电动滑轨(11)、回收圆盘(12)、电磁基座(13)、锚定钩爪(14)、柔性通道(15)、卷线器(16)、缆绳(17)和锚定小球(18);所述无人机悬浮平台(10)设置在潜航器顶部,所述无人机悬浮平台(10)用于搭载无人机,所述电动滑轨(11)设置在升降托盘(12)和滑移电池仓(8)之间,所述电磁基座(13)和锚定钩爪(14)设置在无人机悬浮平台,所述柔性通道(15)位于潜航器中心,所述卷线器(16)设置在无人机下方,所述缆绳(17)设置在卷线器(16)上,所述锚定小球(18)设置在缆绳(17)末端。
5.根据权利要求1所述的潜航器搭载集群无人机装置,其特征在于,所述无人机蜂巢储存模块(4)包括升降托盘(12)、自由度调节装置(19)、电推斜面(20)、无人机储存舱(21);所述升降托盘(12)设置在潜航器中心,所述自由度调节装置(19)和电推斜面(20)设置在升降托盘(12)侧边,所述无人机储存舱(21)设置在潜航器侧面。
6.根据权利要求1所述的潜航器搭载集群无人机装置,其特征在于,所述柔性通道(15)由非弹性软材料构。
技术总结
本发明涉及一种潜航器搭载集群无人机装置,包括潜航器姿态控制模块、潜航器运动补偿模块、无人机自动收发模块、无人机蜂巢储存模块;所述潜航器姿态控制模块设置在潜航器侧面和中部,所述无人机运动补偿模块设置在潜航器顶部,所述无人机自动收发模块设置在潜航器内部上方,所述无人机蜂巢储存模块设置在潜航器中心和侧面,潜航器姿态控制模块分布于无人机蜂巢储存模块外侧,所述无人机自动收发模块设置在无人机蜂巢储存模块上方。本发明以去中心化、分布式的蜂巢式存储结构实现无人机集群的存储,能够为无人机作业提供安全保障和续航保障,使得无人机能够安全应用于远洋作业过程,对于实现远洋作业无人化、智能化,具有较大的现实意义。
技术研发人员:张海宇,安娜,韩承宇,孔祥韶,郑成
受保护的技术使用者:武汉理工大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!