一种长续航可滑行UUV及续航作业方法与流程
本发明涉及水下航行器,尤其是一种长续航可滑行uuv及续航作业方法。
背景技术:
1、uuv作为水下对抗体系中重要的装备之一,在水下侦察、搜索、测绘等多方面发挥了巨大的作用。通常情况下,uuv由母船释放,在水下依靠推进器航行,并且需要潜艇或者母船等保障设施进行充电。通常潜艇或者母船与uuv的作业点的距离较远,且uuv的作业位置不便于潜艇或者母船靠近,当uuv的作业未完成时,电量可能出现不足的情况。
2、另外,当uuv在目标区域需要执行隐蔽任务时,uuv受自身螺旋桨噪声使uuv在目标区域的行进不满足作业条件,uuv噪音主要来源于螺旋桨,关闭螺旋桨可起到静音效果。
3、因此,当uuv执行隐蔽任务时,受自身螺旋桨噪声在集群作业时具有一定的不适应性,受到自身电量的限制,不能充分发挥其无人化的优势。
技术实现思路
1、本技术人针对上述现有生产技术中的缺点,提供一种长续航可滑行uuv及续航作业方法,从而使uuv在执行隐蔽任务时,不受自身螺旋桨噪声和电量的限制,能充分发挥其无人化、适应集群作业,实现智能化航行。
2、本发明所采用的技术方案如下:
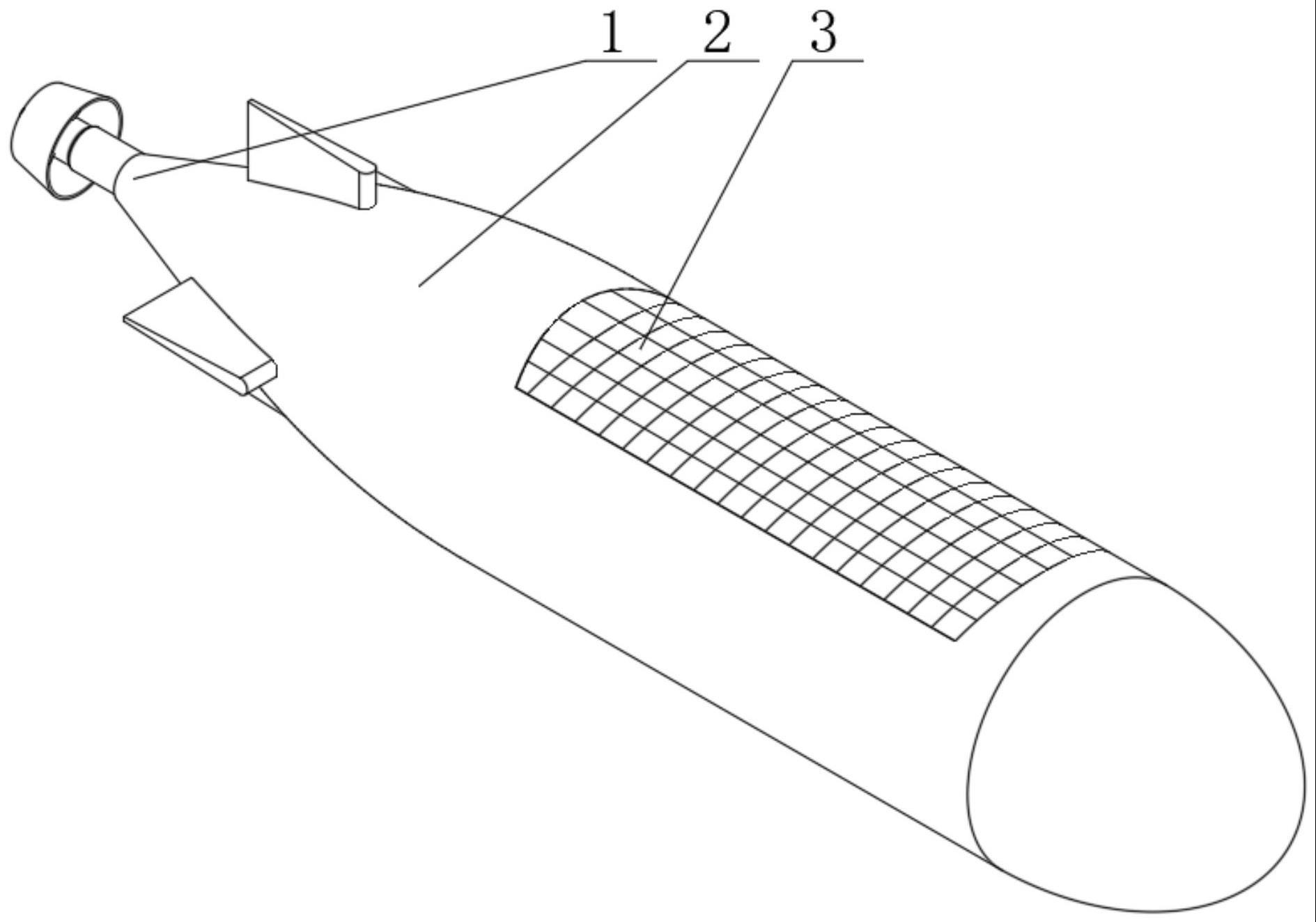
3、一种长续航可滑行uuv,包括航行本体以及滑行翼,所述航行本体的尾部设置推进系统,所述航行本体的外壳体中部上方设置有缺口,所述缺口与所述滑行翼的下部配合后,所述滑行翼外表面与所述航行本体的外表面流线型一致,所述外壳体内部设置有为推进系统提供电能的电源模块;
4、所述滑行翼包括与所述航行本体的外表面流线型一致的表层太阳能充电板,所述滑行翼的下部设置有定位槽,所述定位槽内部伸出与所述表层太阳能充电板连接的线缆;
5、所述外壳体内部安装有旋转机构,所述旋转机构包括位于所述旋转机构上端的定位块,所述定位块穿过所述缺口上表面并位于所述缺口上方,还包括贯穿设置于所述旋转机构内部的导向通孔,所述导向通孔的一端位于定位块外表面,所述导向通孔的另一端位于所述旋转机构的下端,所述线缆的端部穿过所述导向通孔后与电源模块电连接,所述外壳体内设置有绞车,所述绞车用于收紧放松所述线缆;
6、所述绞车收紧所述线缆将所述定位块与所述定位槽配合后,所述旋转机构驱动所述滑行翼旋转90度,使所述uuv具有滑行功能;
7、所述绞车放松所述线缆将所述定位块与所述定位槽解除配合后,将所述滑行翼布放至水面,表层太阳能充电板给位于外壳体内部电源模块进行充电。
8、其进一步技术方案在于:
9、所述定位块与所述定位槽均为半椭球形。
10、所述滑行翼的结构为:包括所述表层太阳能充电板,所述表层太阳能充电板的内部设置有浮力材料,所述表层太阳能充电板沿所述滑行翼长度方向一侧铰接有第一太阳能充电板,所述表层太阳能充电板沿所述滑行翼长度方向另一侧铰接有第二太阳能充电板,所述滑行翼长度方向中部安装有第一展开装置和第二展开装置,所述第一展开装置用于收起和打开所述第一太阳能充电板,所述第二展开装置用于收起和打开所述第二太阳能充电板;
11、所述第一太阳能充电板和第二太阳能充电板收起后位于所述滑行翼的下部并与所述缺口配合,第一太阳能充电板和第二太阳能充电板展开后分别位于所述表层太阳能充电板的两侧,所述第一太阳能充电板和第二太阳能充电板的发电面朝上;
12、所述线缆与所述第一太阳能充电板和第二太阳能充电板电连接的同时与第一展开装置和第二展开装置电连接。
13、所述第一太阳能充电板和所述第二太阳能充电板收起时,所述第二太阳能充电板位于所述第一太阳能充电板上方,所述第一太阳能充电板的发电面与所述缺口上表面配合。
14、所述第一太阳能充电板数量为两块,且沿所述滑行翼长度方向间隔设置,两块第一太阳能充电板通过第一连接杆连接;
15、所述第二太阳能充电板数量为两块,且沿所述滑行翼长度方向间隔设置,两块第二太阳能充电板通过第二连接杆连接;
16、所述第一展开装置设置于两块第一太阳能充电板之间的表层太阳能充电板下表面内部,所述第二展开装置设置于两块第二太阳能充电板之间的表层太阳能充电板下表面内部,所述第一展开装置与所述第二展开装置的结构相同;
17、所述第一展开装置的结构为:包括固定安装于所述表层太阳能充电板下表面内部的驱动电机,还包括第一连杆和第二连杆,所述第一连杆的一端与所述驱动电机的输出端固定连接,所述第一连杆的另一端与所述第二连杆的一端与铰接,所述第二连杆的另一端与所述第一连接杆铰接。
18、所述第一展开装置包括能量管理模块,所述能量管理模块设置于两块第一太阳能充电板之间的表层太阳能充电板下表面内部,所述能量管理模块与线缆电连接。
19、所述旋转机构的结构为:包括固定安装于所述外壳体内部的第一电机以及转动安装于所述外壳体上的底座,所述第一电机用于驱动所述底座转动,所述底座上设置有连接轴,所述连接轴的上端为所述定位块。
20、还包括固定安装于所述底座上的第二电机,以及转动安装于所述底座上的轴套,所述第二电机用于驱动所述轴套转动,所述轴套的内孔设置有内螺纹,所述连接轴的外部设置有与所述内螺纹配合的外螺纹;
21、所述底座上设置有与所述连接轴内部导向孔配合的导向杆,所述导向杆和导向孔均沿所述连接轴的轴向设置,所述导向通孔贯穿所述连接轴、轴套和底座。
22、一种长续航可滑行uuv的续航作业方法,包括以下步骤:
23、自驱航行作业:通讯及导航系统检测到uuv位于非敏感海域并发出位置信号,同时电源模块输出电量正常信号,数据处理系统接收位置信号和电量正常信号后,控制推进系统工作,uuv由推进系统驱动朝目标区域航行;
24、滑行航行作业:通讯及导航系统检测到uuv位于目标区域附近的敏感海域并发出位置信号,数据处理系统接受到位置信号后发出启动滑行功能信号,启动旋转机构,控制滑行翼旋转90度,然后关闭推进系统,此时uuv具有一定初速度,uuv滑行至目标区域或从目标区域滑行出敏感海域;
25、充电航行作业:通讯及导航系统检测到uuv位于非敏感海域并发出位置信号,同时电源模块输出电量不足信号,数据处理系统接收位置信号和电量不足信号后发出启动充电功能信号,同时绞车放松线缆将滑行翼布放至水面,表层太阳能充电板给电源模块进行充电,当电源模块输出电量信号为电量充足信号时,数据处理系统控制推进系统工作,uuv在水下进行探测作业,表层太阳能充电板继续给电源模块进行充电。
26、其进一步技术方案在于:
27、充电航行作业步骤中,在布放滑行翼至水面之前,启动旋转机构,控制滑行翼旋转90度。
28、本发明的有益效果如下:
29、本发明结构紧凑、合理,操作方便,通过在航行本体的中部上方设置外表面与航行本体的外表面流线型一致且具有太阳能充电板的滑行翼,滑行翼可以通过旋转机构旋转90度为uuv提供滑行功能,使uuv在执行隐蔽任务时,可关闭推进系统滑行,单体或者集群作业均可降低噪声影响;通过绞车和线缆将滑行翼布放至水面,同时实现uuv海面充电,远距离作业过程中可根据实际情况进行充电,为uuv续航,充分发挥无人作业优势,实现智能化航行。
30、同时,本发明还存在如下优势:
31、(1)通过在滑行翼下部设置可收起和打开的第一太阳能充电板和第二太阳能充电板,增加了滑行翼布放至水面后转化太阳能为电能的有效面积,加快了充电的速度,同时也提高了滑行翼漂浮于海面时的耐波性。
32、(2)通过在旋转机构增加连接轴相对于底座的升降功能,在旋转机构驱动滑行翼旋转90度之前启动第二电机,使连接轴上升进而定位块升高将滑行翼3整体顶起,使滑行翼旋转过程中不易触碰缺口或航行本体;在回收滑行翼时在绞车收紧线缆之前,启动第二电机增加导向通孔的整体长度,能够降低滑行翼回收过程中,线缆被艇附体缠绕的可能性,增加了回收过程的可靠性。
33、(3)本实施例的uuv续航作业方法实现uuv非敏感海域自驱航行、敏感海域滑行、非敏感海域充电航行的功能,uuv在非敏感区域由母船释放以后,自主航行至非敏感区域边缘,在敏感海域能够保证推进系统关闭的情况下,安静的抵近目标区域完成任务,适用于隐蔽作业场景,将具有充电功能的滑行翼布放到水面进行充电,较传统uuv本实施例的uuv在恶劣海况的情况下也可以自主充电,极大程度的保证了单体续航力,也增加了uuv水下探测的作业时间。
- 还没有人留言评论。精彩留言会获得点赞!