一种胸鳍和尾鳍协同推进的仿生机器鱼及其控制方法
本发明属于仿生水下机器人应用,涉及到包括外形结构设计、驱动系统、通信系统和控制算法在内的仿生机器鱼的整体样机设计,具体涉及一种胸鳍与尾鳍协同推进的仿生机器鱼及其控制方法。
背景技术:
1、在河流和海洋等水下作业中,水下机器人通过搭载各种不同类型的传感器可以完成水下环境的搜索、搜救、监测、资源勘探和水雷检测等任务,在民用和军用领域发挥了重要作用。使用水下机器人有利于克服水下恶劣的自然环境,辅助人类完成水下工作或替代人类完成高危的任务需求。
2、水下生物经过上百万年的进化,长期在水下生存,在游动速度、推进效率和机动能力上具有天然的身体优势。从仿生学的观点来看,水下机器人又分为螺旋桨推进的鱼雷型机器人和师法自然的仿生机器鱼。仿生机器鱼与螺旋桨推进的水下机器人相比具有噪音小、隐蔽性好、机动性好以及能量利用效率高等优点,对各种鱼类进行仿生学研究具有重要的科学和工程价值。因此,根据鱼类的推进方式和流体外形设计符合实际需求的机器鱼作为水下作业平台具有重要意义。
3、大多数鱼类并不严格依赖于单一的鱼鳍来实现运动,例如,黑海鲫在低速游泳时仅使用胸鳍,在高速游泳时则切换到胸鳍和尾鳍结合运动,而一些硬骨鱼类如箱鲀通过主动控制胸鳍、尾鳍、背鳍和臀鳍的协调运动来完成日常活动。
4、目前已有学者对鳍-鳍相互作用下鱼类的运动性能进行了研究。文献(han,p.,lauder,g.v.,&dong,h.b.hydrodynamics of median-fin interactions in fish-likelocomotion:effects of fin shape and movement[j].)通过cfd系统研究了背鳍/臀鳍与尾鳍运动相位对水动力性能的影响。数值分析表明,增加背鳍/臀鳍面面积或允许背鳍/臀鳍进行导相瓣,可以有效提高尾鳍的运动性能。文献(mignano,a.,kadapa,s.,tangorra,j.,&lauder,g.v.passing the wake:using multiple fins to shape forces forswimming[j].)搭建了多鳍固定实验平台,研究了臀鳍、背鳍、实验结果表明,选择合适的背鳍与尾鳍之间的位置和运动相位,可以提高平台推力,减小平台产生的侧向力。文献(ding,j.,zheng,c.z.,song,c.c.,zuo,q.y.,xu,y.h.,dong,b.b.,cui,j.x.,he,k.,&xie,f.r.experimental study on the improvement of yaw stability by coordinationcontrol between the caudal fin and anal fin[j].)提出了一种由多鳍驱动的无系绳机器鱼。通过测量样机向前游动时的偏航角变化,研究了臀鳍与尾鳍运动相互作用的影响。俞志伟等提出了一种背鳍和尾鳍协同推进的仿旗鱼机器人鱼(专利申请号:202310077154.x),其背鳍推进结构拥有两个自由度,尾鳍推进结构具有3至5个关节,背鳍既可以收起来实现快速前进运动,也可以展开作为方向舵实现转弯机动,提高了仿旗鱼机器人的游动速度以及机动性。
5、结合上述参考文献和专利可知,现有研究机器鱼多鳍协调运动的方法大多停留在驱动关节的简单叠加上,或者集中于背鳍、臀鳍和尾鳍的相互作用,对胸鳍和尾鳍各部分的驱动关节之间的耦合关系及其对机器鱼运动的影响尚不明确。尽管胸鳍和尾鳍是鱼类最重要的两个推进器,且由胸鳍和尾鳍同时推动的机器鱼具有更好的运动机动性,但胸鳍和尾鳍耦合关系对机器鱼游动性能和机动性的缺乏系统的分析梳理和深入的研究总结。总之,目前关于机器鱼胸鳍和尾鳍耦合协调推进的内容尚未得到有效的研究。分析胸鳍和尾鳍之间的相互作用,不仅可以使机器鱼调节其游动稳定性,从而适合携带传感器执行操作任务,而且还可以为揭示多鳍鱼类的运动机制提供理论基础。
6、箱鲀常年栖息在珊瑚礁中,生活环境拥挤逼仄、错综复杂,通过在珊瑚礁裂缝中快速转向和灵活穿梭实现捕食和躲避敌害等行为,这些活动要求其具备高机动性的游动能力。通过对生物箱鲀游动状态的观测,我们发现箱鲀的身体结构和胸鳍与尾鳍的协调配合是箱鲀实现高机动性的奥秘之一。箱鲀通过对多鳍运动的调节,可以利用身体的不稳定性来实现偏航、俯仰等机动行为,也可以减少巡航时的水下后坐力运动。因此,设计胸鳍和尾鳍协调运动的仿箱鲀机器人,研究鳍间协调运动关系对鱼类巡航的影响具有重要的理论意义和工程价值。
技术实现思路
1、本发明的目的是提供一种具有高效稳定推进能力和机动性强的水下移动探索载体平台,以箱鲀为仿生对象,设计一种胸鳍和尾鳍协同推进的仿生机器鱼及其控制方法,通过胸鳍和尾鳍的耦合协同推进来实现机器鱼的高效游动,并通过改变胸鳍和尾鳍的耦合运动控制参数,实现机器鱼的机动性能。
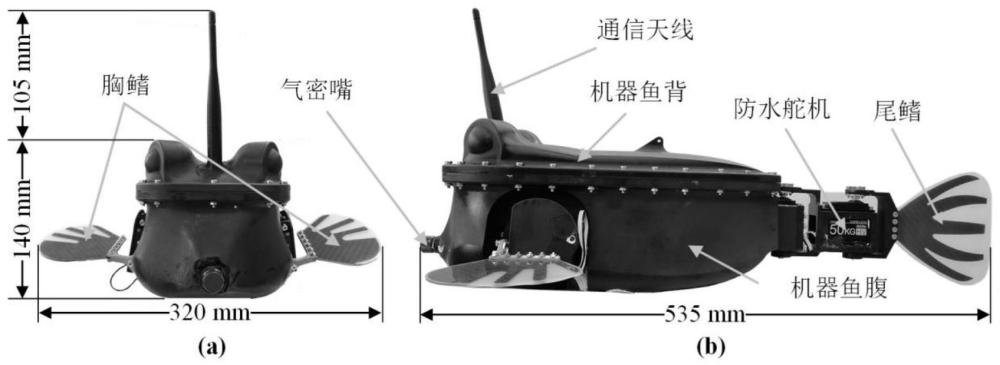
2、所述胸鳍和尾鳍协同推进的仿生机器鱼,整个机器鱼仿照生物箱鲀的外形特性进行设计,包括机器鱼主体、2个胸鳍推进结构和尾鳍推进结构。2个胸鳍推进结构分别位于机器鱼主体的左右两侧,尾鳍推进结构位于机器鱼主体的末端。
3、机器鱼主体为中空结构,上部为鱼背,下部为鱼腹,两部分通过螺栓连接扣合而成,通过在连接处设置的o型硅橡胶密封圈并涂抹防水硅脂实现机器鱼主体的静密封防水。鱼背的腔体内固定安装电池和通信天线,通信天线穿出鱼背;鱼背上表面前端左右两侧各有一个类鱼眼结构,用于扩展安装双目摄像头,实现水下目标的检测与识别。鱼腹的腔体内设置mcu、电路设备、无线通信设备和传感器,电路设备给其他各部分供电,传感器起到控制和感知的作用,无线通信设备保证仿箱鲀机器鱼能够在水下无拖缆的、实时数据交互的、自主可靠地作业。
4、每个胸鳍推进机构包括两个防水无刷舵机、舵机安装支架、舵机盘、胸鳍鳍片安装支架和胸鳍鳍片。两个防水无刷舵机按照空间垂直正交的方向布置,分别为鳍基驱动舵机和鳍面拍动舵机,其中,鳍基驱动舵机固定安装于鱼腹内,通过舵机盘与舵机安装支架连接;鳍面拍动舵机安装于舵机安装支架上,跟随鳍基驱动舵机进行转动以实现胸鳍的扭转;胸鳍鳍片通过胸鳍鳍片安装支架经过舵机盘与鳍面拍动舵机进行连接,以实现胸鳍鳍片的拍动。
5、尾鳍推进机构包括两个防水无刷舵机、舵机安装支架、舵机连接支架、尾鳍鳍片连接尾柄、舵机盘以及尾鳍鳍片,第一个防水无刷舵机通过舵机连接支架固定在鱼腹尾端外部,第二个防水无刷舵机通过舵机安装支架和舵机盘与第一个防水无刷舵机进行连接,尾鳍鳍片连接尾柄通过舵机盘与第二个防水无刷舵机进行连接,最后将尾鳍鳍片固定于尾鳍鳍片连接尾柄。通过两级防水无刷舵机串联,赋予了仿箱鲀机器鱼尾鳍两个运动关节。
6、胸鳍鳍片和尾鳍鳍片采用薄碳纤维板骨架作为支撑,骨架两侧粘结柔性硅胶板制成;胸鳍前缘处骨架设置空隙较小,后缘处空隙逐渐增大;尾鳍处骨架自尾柄连接处沿着鳍条空隙不断加大。
7、mcu处理控制信号和传感器信息,并生成pwm信号来控制6个防水无刷舵机的角度转动。电路设备包括印刷电路板、防水机械开关和用于电池充电的防水航插,无线通信设备包括无线通信模块和无线调试器,传感器包括定位传感器、imu和深度传感器。
8、imu安装在鱼腹前端的安装板上,用于获取和计算机器鱼游动过程中的实时姿态和加速度;当imu传感器检测发现机器鱼在游动过程中出现了偏航、滚转和俯仰等异常状态时,通过反馈协调胸鳍、尾鳍的摆动使机器鱼恢复正常游动姿态;
9、定位传感器安装于鱼腹腔体的上方,通过定位算法实现机器鱼在水中的位置较准和定位;
10、深度传感器安装在鱼腹后端底部,用于实时测量机器鱼所处的水深;
11、进一步,配重块安装在鱼腹内底面上,以降低机器鱼的重心,通过调整配重块位置使机器鱼的重心位于浮心正下方,以保证仿箱鲀机器鱼在游动过程中的稳定性。
12、所述的胸鳍和尾鳍耦合协同运动的控制方法如下:
13、通过6个振荡器单元构成cpg网络对机器鱼的6个自由度进行驱动,通过调整cpg网络的控制参数来实现直线运动、转向运动和俯仰运动三种模式,具体为:
14、(1)机器鱼在直线运动模式下尾鳍保持中位(即振幅偏置为0),依靠胸鳍提供推进力,以及调整运动姿态;
15、两侧胸鳍通过扭转和拍动的复合摆动给机器鱼提供向前或者向后的推力,决定机器鱼向前或者向后移动;通过控制胸鳍的摆动幅度频率以及胸鳍扭转关节和拍动关节的相位差进行推力的调整,从而控制机器鱼移动速度,同时动态调整机器鱼的姿态;
16、进一步,在胸鳍提供向前推力的同时,尾鳍推进机构以身体中位为中心进行快速往复摆动,能够增加向前的推力,提高移动速度,实现机器鱼的快速前进。
17、(2)机器鱼在转向运动模式下,胸鳍和尾鳍互相给对方提供推进力和转向控制,通过调整胸鳍和尾鳍的控制参数实现不同的转向幅度的调节,具体为:
18、①尾鳍保持中位静止,胸鳍通过鳍基的扭转和鳍面的拍动实现复合运动产生前向和左/右向的推力,使机器鱼朝左/右前方游动,实现左/右转弯;
19、②尾鳍摆到身体左侧静止,胸鳍通过鳍基的扭转和鳍面的拍动实现复合运动产生前/后向推力,实现左/右转弯。
20、③尾鳍摆到身体右侧静止,胸鳍通过鳍基的扭转和鳍面的拍动实现复合运动产生前/后向推力,实现右/左转弯。
21、④尾鳍偏右侧往复摆动,胸鳍通过鳍基的扭转和鳍面的拍动实现复合运动产生前向推力或者前向和左向的组合推力,使机器鱼产生向左的侧向力和向前的推进力,实现左转弯。
22、⑤尾鳍偏左侧往复摆动,胸鳍通过鳍基的扭转和鳍面的拍动实现复合运动产生前向推力或者前向和右向的组合推力,使得机器鱼产生向右的侧向力和向前的推进力,实现右转弯。
23、(3)机器鱼在俯仰运动模式下,胸鳍通过鳍基的扭转和鳍面的拍动实现复合运动产生前向和向上/下的推力,当尾鳍保持中位静止或摆动,实现机器鱼斜线俯仰运动;当尾鳍偏向一侧摆动,实现机器鱼螺旋线俯仰运动。
24、本发明与现有技术相比具有以下优点:
25、1、本发明能够实现仿生机器鱼的胸鳍和尾鳍的耦合协同运动,并通过胸鳍与尾鳍的耦合协调实现不同运动模式下的鳍面拍动切换,有效增强了仿生机器鱼的推进能力和机动能力;
26、2、在本发明中,胸鳍具有两个自由度,实现了胸鳍在两个方向上的扭转和拍动,模拟了生物箱鲀的胸鳍运动;尾鳍具有两个串联关节,有效模拟了鱼类的尾鳍摆动,为机器鱼水下移动平台提供了多种多样的运动方式的组合,能够通过协调胸鳍和尾鳍的运动以针对不同的水下环境调整自身的游动状态,增强了仿生机器鱼的环境适应能力和作业能力;
27、3、本发明中的仿生机器鱼使用多个传感器,当机器鱼游动过程中出现异常时可以通过传感器的信息反馈,协调胸鳍和尾鳍的运动模式,使其恢复正常游动;此外,预留了避障传感器和视觉传感器的安装空间,后续可根据实际的水下作业需求进行安装和扩展。
- 还没有人留言评论。精彩留言会获得点赞!