一种基于北斗导航的溺水检测和智能水下救援系统
本发明涉及溺水检测救援,尤其涉及一种基于北斗导航的溺水检测和智能水下救援系统。
背景技术:
1、水下救援机器人在国内的研究发展现状较为繁荣,目前主要从水下支援装备、自主水下机器人、水下搜索监测系统、水下航行救援系统4个方面进行研发。北斗卫星目前真正逐渐完善取代gps,在交通,农业,等多个领域提供服务,在一些地区和公共游泳场所,无人机已开始应用于灾区救援,户外探险辅助,还有溺水救援,如扫描地形,快速投放救生圈。水下救援机器人在国内的研究发展现状较为繁荣,这将为未来水下作业和救援提供更好的解决方案。水上事故频发,水域救援是一项突发性强、时间紧迫、技术要求高、救援难度大、危险系数高的救援项目,救援人员不时要面临极端天气和环境执行救援任务,风险极大。随着人工智能和新一代信息技术的发展,当水域灾害发生时,如何利用最先进的应急救援装备,在救援黄金时间内快速救援,最大限度拯救生命和降低财产损失,我们需要做到的是智能化水下救援。使用机器人可以避免人类进行危险的任务,减少人员伤亡,并且可以进行更加复杂的任务这也给水下救援机器人的发展带来了更多的挑战和机遇。但是发展缺乏的点在于救援机器人技术并不完善,主要表现在软硬件的不协调、智能化和运动控制的不够精细、无人机稳定性和安全性有待进一步提高等方面。同时,救援机器人的发展也存在一些问题,比如在现场救援场景下,识别和定位环境的问题并不完善,对视觉感知的要求很高,而摄像头的技术及其质量也变得更加重要;此外,机器人智能本身的缺乏,也是影响发展的一个重要因素。
2、水下救援机器人在国外的研发发展现状也显得十分繁荣。主要来自欧洲和美国的科研团队都有致力于水下救援机器人研发的工作。欧洲大陆的水下机器人研发主要集中在英国、西班牙、意大利等国,研发领域主要涵盖水下机器人开发、水下搜索监测、海底探测、水下机器人操纵和控制等。在美国,nasa和纽约大学的海洋机器人实验室也同样投入了大量经费进行水下机器人研发工作,并取得了相当的研发成果。此外,美国海军也建立了一个特别的海洋机器人中心,对水下搜索、监测和救援等领域进行了大量的研发和实践。通过以上的发展,水下救援机器人在国外得到了大量的应用,为水下作业和救援带来了很大的便利。水下全自动救援机器人的发展缺乏点是由于水下环境的复杂性以及水下机器人技术比较落后的原因。首先,水下环境相比空气环境,更加复杂,水下机器人需要面对环境因素的影响,比如提高水下声速和光衰减等问题,因此其定位和感知的能力必须得到相应改进;其次,相比空气环境,当前水下机器人技术普遍落后,水下机器人体积和重量也过大,故而也是影响水下机器人发展的一个重要因素。在监测方面,欧美等发达国家在计算机视觉领域有着深入的研究和应用,其中包括水域安全的实时监控。国外的定位还是gps为主要使用的技术,并且在一些国家如美国,澳大利亚在一些公共海滩已经开始推行了无人机救援技术,在国外的某些国家比如美国,存在公共安全和气象警报结合的app,为民众实时推送安全警报。
3、但是对于目前还没有成熟的溺水自动检测与自动救援系统,因此,设计一种基于北斗导航的溺水检测和智能水下救援系统。
技术实现思路
1、本发明的目的在于提供一种基于北斗导航的溺水检测和智能水下救援系统,解决现有江河海等水域出现人员溺水时无法实现自动救援和自动报警的技术问题。
2、为了实现上述目的,本发明采用的技术方案如下:
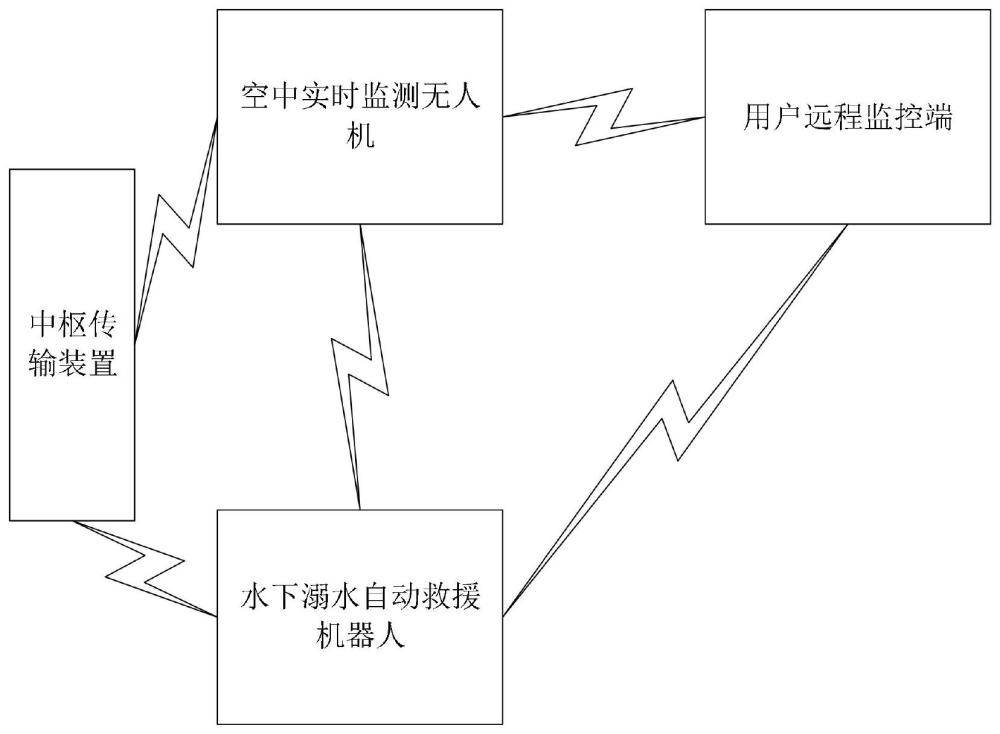
3、一种基于北斗导航的溺水检测和智能水下救援系统,包括用户远程监控端、空中实时监测无人机和水下溺水自动救援机器人,用户远程监控端和空中实时监测无人机均与水下溺水自动救援机器人无线连接,用户远程监控端与空中实时监测无人机无线连接,空中实时监测无人机用于实时监测湖里、河里或者海里的是否出现溺水人员,当检测到有人溺水时,通知再水里的水下溺水自动救援机器人到达相应地点对溺水人员进行自动救援,并现场发出警报通知附近人员对溺水者进行救援,同时将有人溺水信息通知用户远程监控端和自动报告相关救援单位,水下溺水自动救援机器人用于在湖里、河里或者海里进行实时巡逻,当发现有溺水人员时进行对溺水人员救援,用户远程监控端用于对水下溺水自动救援机器人进行实时控制和查看水下信息,同时实时对空中实时监测无人机进行控制和查看水面的图像信息。
4、进一步地,上述还包括中枢传输装置,中枢传输装置包括水上无线传输模块和若干个水下无线传输模块,水上无线传输模块与若干个水下无线传输模块通过电缆连接,水上无线传输模块设置在水面的上空,若干个水下无线传输模块间隔设置在水域内部,水上无线传输模块分别与用户远程监控端和空中实时监测无人机无线连接,若干个水下无线传输模块与水下溺水自动救援机器人无线连接,当用户远程监控端或者空中实时监测无人机无法与水下溺水自动救援机器人通信时,通过与水上无线传输模块连接后,再通过水下无线传输模块与水下溺水自动救援机器人连接,避免因为水深无法与水下溺水自动救援机器人无法连接。
5、进一步地,空中实时监测无人机包括无人机壳体与无人机系统,无人机系统设置在无人机壳体上,无人机系统包括图像识别采集摄像头、多模态传感器、北斗定位模块、无线收发模块、无人机控制器模块、语音喇叭、自动报警模块和激光位置指示装置,图像识别采集摄像头、多模态传感器、北斗定位模块、无线收发模块、语音喇叭、动报警模块和激光位置指示装置均与无人机控制器模块连接,图像识别采集摄像头用于实时检测水面上的视频信息,并将视频信息传给无人机控制器模块,无人机控制器模块对视频信息进行识别判定水面上是否有溺水人员,多模态传感器识别水里游泳者是否出现溺水,北斗定位模块用于实时定位无人机的位置,在发生有人溺水时,通过动报警模块进行报给救援部门,并发送精准的位置信息,同时报告给用户远程监控端,无线收发模块用于与水下溺水自动救援机器人和用户远程监控端连接,语音喇叭用于发出语音,当发现水域上有人溺水时,语音喇叭发出大声求救信号,吸引溺水者附近人员过来救援,自动报警模块将溺水者信息和位置上报给医院和溺水救援中心,激光位置指示装置发射一束激光对溺水人员的位置进行照射,为救援提供精准的位置提示,使得救援效率更高。
6、进一步地,水下溺水自动救援机器人包括机器人壳体和机器人控制系统,机器人控制系统设置在机器人壳体内部,机器人控制系统包括水下摄像头、人体红外识别模块、激光光束识别模块、姿态控制装置、弹射装置、气囊收放装置、气体产生装置、水下机器人无线模块和水下机器人控制器模块,水下摄像头、人体红外识别模块、激光光束识别模块、姿态控制装置、弹射装置、气囊收放装置、气体产生装置和水下机器人无线模块均与水下机器人控制器模块连接,水下摄像头用于实时采集水下的视频数据并传给水下机器人控制器模块,水下机器人控制器模块通过对数据识别处理后经过水下机器人无线模块传给用户远程监控端或者空中实时监测无人机,激光光束识别模块用于识别有激光束照射的具体位置,人体红外识别模块用于识别溺水人员的具体位置,姿态控制装置用于控制救援机器人平衡游动,气体产生装置通过软管与气囊收放装置连接,并为气囊收放装置里面的气囊充气,气囊收放装置与弹射装置的弹射头连接,气囊收放装置内的气囊头部设置有粘合贴,弹射装置将气囊头部弹射在溺水人员身上。
7、进一步地,水下溺水自动救援机器人发现溺水人员的救援过程为:水下溺水自动救援机器人根据激光束的位置进行游动到激光束附近,然后根据人体红外识别模块识别溺水人员的具体位置,弹射装置将气囊收放装置内的气囊头部具有粘合部位弹射到溺水人员身上,并粘合在人体上,弹射装置的弹射头上设置有压力传感器,当压力大于设定值时,确定气囊头部粘合在人体上,然后水下溺水自动救援机器人围绕溺水者转一圈,未充气的气囊贴合在溺水者身体外面,然后气体产生装置发生气体给气囊充气,受到浮力作用将溺水者浮起,然后水下溺水自动救援机器人将溺水人员拉回岸边。
8、进一步地,多模态传感器检测是否有人溺水的过程为:
9、对视频中的游泳者进行采样,每10帧提取一张照片,利用预训练的open pose模型进行人体姿态估计,确保得到游泳者的18个身体关键点,若某些关键点未被检测到,应进行适当的填补;
10、调整坐标系,以脖子位置为参考点重新定义,按照新的坐标系更新各关键点坐标,并计算与参考点的相对距离,从而生成游泳者的关键点距离描述符;
11、对比当前图片中游泳者的关键点描述符与预先定义的溺水状态关键点描述符集,若连续20张图片中,游泳者的关键点描述符与某一种溺水状态描述符的相似度r2均高于或等于0.6,那么系统将识别为溺水情况。若不满足上述条件,则重新比对。
12、进一步地,机器人壳体设置为蛇形结构,机器人壳体采用舵机驱动的方式,通过舵机控制各关节进行蛇形蜿蜒运动,通过控制舵机不同的转动角度,实现机器人整体的形态改变,并通过加装仿乌贼若干腔体型气动软体驱动器进行动力补给,提升机器人的运动速度,达到救援的目的,机器人通过气动软体驱动器的运行完成前进、转向的动作,通过舵机的旋转,关节处的舵机连接结构上下、左右运行,实现机器人的上浮、下潜、左右旋转运动,同时,每一关节均为两连接部分与另一结构进行卡扣方式连接,对蛇蜿蜒运动的轨迹曲线进行研究分析,设计蜿蜒运动控制函数,实现蛇形机器人的蜿蜒前行以及缠绕功能。
13、进一步地,无人机系统还包括电压采集电路和供电电路,电压采集电路为压电阻形式,将电压分接到单片机能够转换的电压范围,利用单片机的a/d转换功能,将电压信号转换成数字信号,并且采用bat54s作为单片机端口保护芯片,将电压钳位到0~3.3v范围内,电压采集电路和供电电路均与无人机控制器模块连接。
14、本发明由于采用了上述技术方案,具有以下有益效果:
15、(2)本发明通过设置在空中的无人机实时巡逻,可以无死角或者水浪波动无法看清有人溺水的情况,可以第一时间发下有人溺水,不会错过救援的宝贵时间,同时通过水下的机器人进行快速的救援,避免岸上没有会游泳无法救援的情况,同时也降低了人工下去救援造成一起溺水的风险,避免溺水事故的发生。
16、(2)通过设置激光照射装进行精准定位,使得水下机器人快速找到溺水者的位置,然后通过发射粘合气囊结构围绕在溺水者身体周边,能够将溺水者浮起,实现了自动救援,救援速度快,效率高的优点。
- 还没有人留言评论。精彩留言会获得点赞!