适配多应急姿态的内外排推跟随机器人及其重心调试方法
本发明属于机器人,具体涉及一种适配多应急姿态的内外排推跟随机器人及其重心调试方法。
背景技术:
1、水下机器人也称无人遥控潜水器,是一种工作于水下的极限作业机器人。水下环境恶劣危险,人的潜水深度有限,所以水下机器人已成为开发海洋的重要工具。无人遥控潜水器主要有:有缆遥控潜水器和无缆遥控潜水器两种,其中有缆遥控潜水器又分为水中自航式、拖航式和能在海底结构物上爬行式三种。
2、而现有的水下机器人在水下观测跟随目标物时存在如下问题:
3、一、在下潜与上潜动作转换时速度慢,而且不能准确的到达指定位置,有时难以控制,稳定性较差。
4、二、在观测跟随时机器人因受到浮力的影响,在机器人行进过程中会出现晃动,导致观测跟随时获取图像信息的清晰度差。
5、三、行进过程中的调节方式单一,缺少能够应对不同水下行进情况的调试方法,利用外界水助力的调节区域存在盲区,未能有效利用。
6、四、在转向时需要转向大弯,往往会离观测跟随目标太远,降低观测效果,且难以在短时间内实现快速调整观测位置。
技术实现思路
1、为解决背景技术中的问题;本发明的目的在于提供一种适配多应急姿态的内外排推跟随机器人及其重心调试方法,提高了下潜与上潜的速度,能够准确达到指定位置,稳定性高,不易晃动,同时能够应对大弯转向等多种姿态应急调试过程。
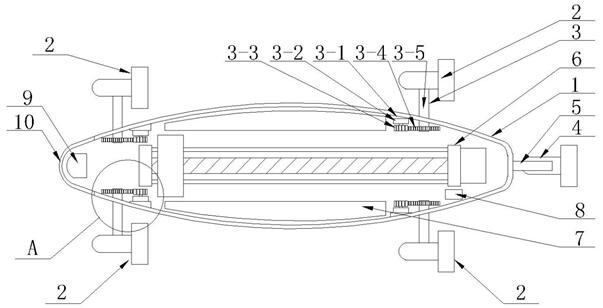
2、本发明的一种适配多应急姿态的内外排推跟随机器人,包括外壳、侧推进器、摆动调件、后推进器、后置调节机构、配重调节机构、蓄电池、控制机构、前摄像头、透明罩体、调节式旋转观测跟随器、信号收发器;外壳的内四侧均安装有摆动调件,四个摆动调件的外端安装有侧推进器,外壳的后端安装有后置调节机构,后置调节机构上安装有后推进器,外壳的内中部安装有配重调节机构,外壳的前端密封式安装有透明罩体,透明罩体内安装有前摄像头,蓄电池、控制机构均安装在外壳的内部,外壳的前顶端安装有调节式旋转观测跟随器,外壳顶端的后侧安装有信号收发器,蓄电池与控制机构的供电端连接,控制机构的输出端分别与摆动调件、后推进器、后置调节机构、配重调节机构、调节式旋转观测跟随器电连接,前摄像头、调节式旋转观测跟随器与控制机构的输入端连接,信号收发器与控制机构连接。
3、作为优选方案,四个侧推进器均为外推内排推进器,四个侧推进器配合设置有自储放水芯体,自储放水芯体设置在总外壳内,每个内排放侧推进器包括推进器本体和进排水软管,进排水软管的一端设置在推进器本体上,进排水软管的另一端穿过摆动调件后与自储放水芯体相连接。
4、作为优选方案,自储放水芯体包括前置储水芯体和后置储水芯体,前置储水芯体靠近总外壳的前端内壁设置,前置储水芯体设置在配重调节机构的一端处,后置储水芯体靠近总外壳的后端内壁设置,后置储水芯体穿设在配重调节机构的另一端处;
5、所述前置储水芯体包括半圆柱形壳体,半圆柱形壳体的底部两侧分别加工有第一进出水孔,第一进出水孔为扁形孔,每个第一进出水孔对应连接有一个所述进排水软管;
6、所述后置储水芯体包括后置外壳和两个双层储放水囊体,后置外壳内设置有两个双层储放水囊体,两个双层储放水囊体并列贴靠设置形成双腔储排水囊体,双腔储排水囊体的形状与后置外壳的形状相配合设置,每个双层储放水囊体的底部加工有第二进出水孔,第二进出水孔为扁形孔,每个第二进出水孔对应连接有一个所述进排水软管。
7、作为优选方案:每个双层储放水囊体包括上条形囊体、柔性连接管和下条形囊体,上条形囊体和下条形囊体从上至下依次水平并列设置,柔性连接管竖直设置,上条形囊体的一端为第一密封端,上条形囊体的另一端通过柔性连接管与下条形囊体的一端相连通,下条形囊体另一端为处于第一密封端下方的第二密封端,第二密封端的底部加工有所述第二进出水孔,上条形囊体、柔性连接管和下条形囊体的内部依次连通形成u形储排水腔体;两个双层储放水囊体中靠近总外壳的一个双层储放水囊体的u形储排水腔体靠近总外壳后端内壁的一侧为弧形侧,该u形储排水腔体远离总外壳后端内壁的一侧为直面侧,两个u形储排水腔体的直面侧相贴靠设置。
8、作为优选方案:前置储水芯体和后置储水芯体之间设置有扁状连通板,扁状连通板沿其厚度方向加工有连通孔,前置储水芯体通过连通孔与后置储水芯体相连通。
9、作为优选方案,所述摆动调件包括侧调节电机座、侧调节电机、侧小齿轮、侧大齿轮、侧旋转轴;侧调节电机座安装在外壳的内侧壁上,侧调节电机安装在侧调节电机座上,侧调节电机的转轴上安装有侧小齿轮,侧小齿轮与侧大齿轮相啮合,侧大齿轮上安装有侧旋转轴,侧旋转轴延伸出外壳的外部,侧旋转轴通过水封、密封圈与外壳相密封。
10、作为优选方案,所述后置调节机构包括固定杆、安装块、安装栓、弧形齿块、调节齿轮、后调节电机、电机用安装盘;固定杆的上端与安装块的后下端连接,安装块的前侧开设有安装槽,安装栓穿接在安装槽内并连接在外壳上,安装块的前端安装有弧形齿块,弧形齿块的齿与调节齿轮相啮合,调节齿轮安装在后调节电机的转轴上,后调节电机上安装有电机用安装盘,电机用安装盘通过螺栓安装在外壳上。
11、作为优选方案,所述侧推进器、后推进器的结构相同,后推进器包括第一前推进壳、第一后推进壳、第一连接杆、第一滤网、第一推进电机、第一推进风叶;第一推进电机通过支架、螺栓安装在前推进壳的内部,第一推进电机的转轴延伸出前推进壳的外部,第一推进外壳的转轴通过水封、密封圈与第一前推进壳密封连接,第一推进外壳的转轴与第一推进风叶连接,第一推进风叶设置在第一后推进壳的内部,第一前推进壳通过数个第一连接杆与第一后推进壳连接,第一后推进壳的前侧与后侧均安装有滤网。
12、作为优选方案,所述配重调节机构包括轴承座、丝杆、配重调节电机、配重块、导向杆;丝杆的两端分别安装在两个轴承座的内部,丝杆的一端通过轴套与配重调节电机的转轴连接,配重调节电机通过螺栓安装在轴承座的外侧壁上,丝杆通过螺纹与配重块上螺纹孔连接,丝杆上对称的开设有导向孔,两个导向孔内安装在导向杆,导向杆的两端分别安装在两个轴承座的内侧壁上。
13、作为优选方案,所述调节式旋转观测跟随器包括密封固定底座、密封透明罩、旋转电机、观测跟随摄像头、检测传感器;密封固定底座的上端密封连接有密封透明罩,密封固定底座的顶端安装有旋转电机,旋转电机的转轴上安装有观测跟随摄像头,密封透明罩的外下侧安装有检测传感器。
14、一种重心调试方法,利用具体实施方式一、二、三、四、五、七、八、九、十或十一所述的适配多应急姿态的内外排推跟随机器人实现,所述重心表示方法包括:
15、多重单端同向调节过程:
16、根据跟随目标所需的具体姿态或应急要求,当内外排推跟随机器人需要快速作出后倾动作时,急需内外排推跟随机器人的重心快速调节,配重块朝向总外壳的后端移动,移动同时,控制前置储水芯体将储水量通过利用处在摆动转轴和推进器本体中的进排水软管将水量排出外界水域中,实现前部减重,形成前部失重辅助后部倾斜姿态,内外排推跟随机器人后部的后置储水芯体处于进水状态,通过摆动转轴和推进器本体中的进排水软管将外界水域中水量泵入双层储放水囊体中;
17、根据跟随目标所需的具体姿态或应急要求,当内外排推跟随机器人需要快速作出前倾动作时,配重块朝向总外壳的前端移动,移动同时,控制前置储水芯体通过处在摆动调件中的摆动转轴和推进器本体的进排水软管将外界水域中水量泵入,实现前部增重,加快前部前倾姿态,同时,内外排推跟随机器人后部的后置储水芯体处于排水状态,通过摆动调件中的摆动转轴和推进器本体的进排水软管将双层储放水囊体中的水量排出外界水域中;
18、多重单端异向调节过程:
19、配重块的移动趋势与前置储水芯体或后置储水芯体进出水趋势形成异向趋势,根据跟随目标所需的具体姿态或应急要求,当内外排推跟随机器人需要快速作出相关动作,急需内外排推跟随机器人重心快速微小调试时,当配重块朝向总外壳的后端移动,移动同时,控制前置储水芯体将其在摆动转轴和推进器本体中的进排水软管的配合下作出吸水处理,形成前部增重,配合配重块后移趋势,加快整体结构重心快速微调变化的过程,且重心调试过程均匀化平缓处理;
20、当配重块朝向总外壳的后端移动,前置储水芯体增重,此时,后置储水芯体处于微流进水状态,形成微增重,配合配重块形成两点一动一静的增重趋势,后置储水芯体微增重的过程为通过处在摆动调件中的摆动转轴和推进器本体中的进排水软管将外界水域中少量水量泵入双层储放水囊体中。
21、与现有技术相比,本发明的有益效果为:
22、一、通过四个侧推进器的位置关系的布置能够实现前置下潜、前置上潜以及单侧置下潜或上潜动作,转换过程简单且变化速度可变,通过配合配重调节机构来提高下潜的速度,同时动作转变过程中确保具有动态稳定性能。
23、二、通过调节侧推进器的角度来克服浮力,提高移动时的动态稳定性,水上和水下动作切换过程中也能够避免较大晃动。
24、三、通过总外壳、侧推进器、摆动调件、后推进器、后置调节机构、配重调节机构、蓄电池、控制机构、前摄像头、透明罩体、调节式旋转观测跟随器和信号收发器之间相互配合实现水下大弯转向以及随需的应急转弯转向动作,转动过程中能够确保自身处于各种转向姿态过程中的稳定性能,提升跟随质量,利于获取数据稳定,实现准确地对水下或水中观测目标所在动态位置进行有效跟随,对目标对象进行准确寻迹跟随,确保观测跟随质量。
25、四、本发明中的侧推进器为外推内排推进器,外推内排推进器在摆动调件和配重调节机构之间的配合下,不仅能够起到对整体结构侧部进行助推的作用,还能够同时兼顾适配调节自身进水和排水的过程,在外推内排推进器的实现正常的推进过程的同时,还能够随实际情况控制自身的重量,整体结构在重心按需适配调节的同时,还能够通过不同位置的进、排水实现整体结构多点驱动与多点进排水重叠的多模式调节过程,实现整体结构重心随需应急变化以及重量随需应急变化的多种适配形式,形成的结构形式能够在行进过程中实时实现前重后轻、前轻后重、一侧轻且一侧重的动态变化过程,适应多种水面、水下的姿态转换,切换过程平稳无晃动。
26、五、本发明在总外壳、侧推进器、摆动调件、后推进器、后置调节机构、配重调节机构、蓄电池、控制机构、前摄像头、透明罩体、调节式旋转观测跟随器和信号收发器之间相互配合下能够实现各种姿态的同时,还能够实现多种重心调试方法,主要为多重单端同向调节过程和多重单端异向调节过程,从而实现本发明按需或应急重心调试时的多种模式。
27、六、本发明适用于石油开发的动态目标物跟随、海事执法取证中动态目标物跟随以及科学研究中动态目标物跟随过程中,适于对复杂多样的动态目标进行适应性实时跟随。
- 还没有人留言评论。精彩留言会获得点赞!