一种自动剖面浮标的制作方法
本技术涉及海洋探测装备,具体涉及一种自动剖面浮标。
背景技术:
1、自动剖面浮标是一种用于搭载多种传感器的海洋探测平台,应用于海洋观测中,专门用于海洋次表层的温盐深数据探测,当完成剖面测量之后,浮标浮出水面,通过卫星通讯将数据传回岸基平台。
2、目前传统的剖面浮标体积和重量较大,给生产、布放和维护带来很多的困扰。
技术实现思路
1、针对现有技术中的缺陷,本实用新型的目的是提供一种自动剖面浮标,该浮标采用模块化处理,生产和维护效率高。
2、本实用新型所采用的技术方案是:
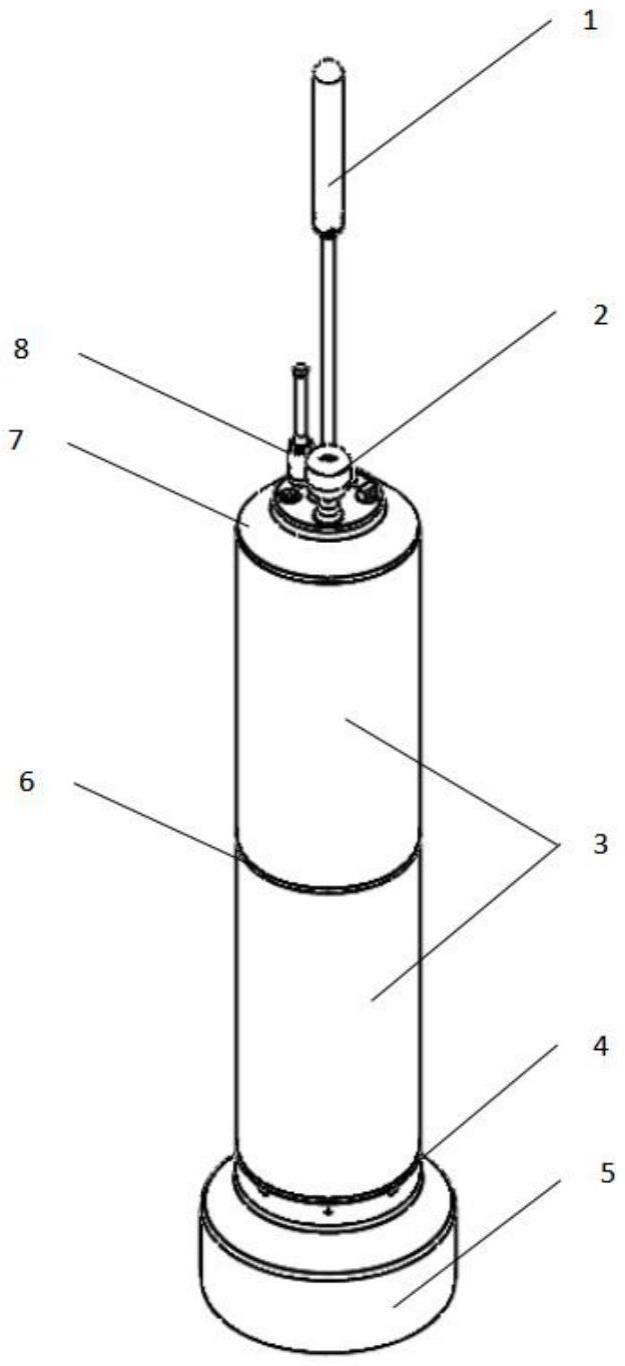
3、一种自动剖面浮标,包括耐压舱、浸水舱、控制单元、能源单元、通信单元和浮力驱动单元的,所述浸水舱设置在所述耐压舱的后端,所述控制单元、能源单元、通信单元以及浮力驱动单元的主体安装在所述耐压舱内,所述浮力驱动单元的外皮囊安装在所述浸水舱内,所述耐压舱包括耐压壳体、上端盖、下端盖和拉紧杆,所述上端盖和下端盖分别配合在所述耐压壳体的两端,所述拉紧杆设置在所述耐压壳体内,其一端与所述上端盖连接,另一端与所述下端盖连接,所述耐压舱内为负压环境,所述通信单元安装在靠近所述上端盖位置,所述浮力驱动单元的主体安装在靠近所述下端盖位置,所述能源单元安装在所述耐压舱的中部。
4、进一步,所述耐压壳体包括上壳体、下壳体和肋环,所述肋环设置在所述上壳体与所述下壳体之间,所述拉紧杆的另一端穿过所述肋环、且与所述下端盖连接。
5、进一步,所述能源单元包括第一能源模块、第二能源模块和螺杆,所述螺杆的一端与所述第一能源模块连接,另一端穿过所述肋环、并与所述第二能源模块连接。
6、进一步,所述第一能源模块和第二能源模块结构相同,均包括走线筒、电池和电池支撑板,所述电池为多个,多个电池沿所述走线筒周向布置,所述电池支撑板为两块,两块所述电池支撑板分别配合在所述电池的两端;所述螺杆的一端与所述第一能源模块的电池支撑板连接,所述螺杆的另一端与所述第二能源模块的电池支撑板连接。
7、进一步,还包括定位板,所述定位板安装在所述上壳体内,所述拉紧杆的另一端依次穿过所述定位板和走线筒,并与所述下端盖连接。
8、进一步,还包括支撑架,该支撑架的一端固定在所述下端盖内侧,所述拉紧杆的另一端固定在所述支撑架的另一端。
9、进一步,所述浮力驱动单元的主体包括内油箱、液压泵、电机和电磁阀,所述内油箱、液压泵和电机安装在所述支撑架上;所述电机的输出轴通过齿轮与所述液压泵连接,所述液压泵的进口与所述内油箱连接,所述液压泵的出口与所述外皮囊连接,所述电磁阀的进口与所述外皮囊连接,所述电磁阀的出口与所述内油箱连接。
10、进一步,所述浮力驱动单元还包括位移传感器,所述位移传感器安装在所述支撑架的另一端、并伸入所述走线筒内。
11、进一步,还包括支撑板,所述支撑板的一端安装在所述上端盖上,另一端向所述肋环方向延伸,所述通信单元和控制单元安装在所述支撑板上。
12、进一步,还包括ctd传感器,该ctd传感器安装在所述上端盖上。
13、本申请的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本申请的实践了解到。
技术特征:
1.一种自动剖面浮标,包括耐压舱、浸水舱、控制单元、能源单元、通信单元和浮力驱动单元,所述浸水舱设置在所述耐压舱的后端,所述控制单元、能源单元、通信单元以及浮力驱动单元的主体安装在所述耐压舱内,所述浮力驱动单元的外皮囊安装在所述浸水舱内,其特征在于,所述耐压舱包括耐压壳体、上端盖、下端盖和拉紧杆,所述上端盖和下端盖分别配合在所述耐压壳体的两端,所述拉紧杆设置在所述耐压壳体内,其一端与所述上端盖连接,另一端与所述下端盖连接,所述耐压舱内为负压环境,所述通信单元安装在靠近所述上端盖位置,所述浮力驱动单元的主体安装在靠近所述下端盖位置,所述能源单元安装在所述耐压舱的中部。
2.根据权利要求1所述的自动剖面浮标,其特征在于,所述耐压壳体包括上壳体、下壳体和肋环,所述肋环设置在所述上壳体与所述下壳体之间,所述拉紧杆的另一端穿过所述肋环、且与所述下端盖连接。
3.根据权利要求2所述的自动剖面浮标,其特征在于,所述能源单元包括第一能源模块、第二能源模块和螺杆,所述螺杆的一端与所述第一能源模块连接,另一端穿过所述肋环、并与所述第二能源模块连接。
4.根据权利要求3所述的自动剖面浮标,其特征在于,所述第一能源模块和第二能源模块结构相同,均包括走线筒、电池和电池支撑板,所述电池为多个,多个电池沿所述走线筒周向布置,所述电池支撑板为两块,两块所述电池支撑板分别配合在所述电池的两端;所述螺杆的一端与所述第一能源模块的电池支撑板连接,所述螺杆的另一端与所述第二能源模块的电池支撑板连接。
5.根据权利要求4所述的自动剖面浮标,其特征在于,还包括定位板,所述定位板安装在所述上壳体内,所述拉紧杆的另一端依次穿过所述定位板和走线筒,并与所述下端盖连接。
6.根据权利要求4所述的自动剖面浮标,其特征在于,还包括支撑架,该支撑架的一端固定在所述下端盖内侧,所述拉紧杆的另一端固定在所述支撑架的另一端。
7.根据权利要求6所述的自动剖面浮标,其特征在于,所述浮力驱动单元的主体包括内油箱、液压泵、电机和电磁阀,所述内油箱、液压泵和电机安装在所述支撑架上;所述电机的输出轴通过齿轮与所述液压泵连接,所述液压泵的进口与所述内油箱连接,所述液压泵的出口与所述外皮囊连接,所述电磁阀的进口与所述外皮囊连接,所述电磁阀的出口与所述内油箱连接。
8.根据权利要求7所述的自动剖面浮标,其特征在于,所述浮力驱动单元还包括位移传感器,所述位移传感器安装在所述支撑架的另一端、并伸入所述走线筒内。
9.根据权利要求2所述的自动剖面浮标,其特征在于,还包括支撑板,所述支撑板的一端安装在所述上端盖上,另一端向所述肋环方向延伸,所述通信单元和控制单元安装在所述支撑板上。
10.根据权利要求1所述的自动剖面浮标,其特征在于,还包括ctd传感器,该ctd传感器安装在所述上端盖上。
技术总结
本技术公开了一种自动剖面浮标,包括耐压舱、浸水舱、控制单元、能源单元、通信单元和浮力驱动单元,所述耐压舱包括耐压壳体、上端盖、下端盖和拉紧杆,所述上端盖和下端盖分别配合在所述耐压壳体的两端,所述拉紧杆设置在所述耐压壳体内,其一端与所述上端盖连接,另一端与所述下端盖连接,所述耐压舱内为负压环境,所述通信单元安装在靠近所述上端盖位置,所述浮力驱动单元的主体安装在靠近所述下端盖位置,所述能源单元安装在所述耐压舱的中部;本申请上端盖和下端盖通过拉紧杆和抽负压方式拉紧在耐压壳体的两端,连接结构简单可靠,采用模块化设置,使得本申请浮标体积小、重量轻,方便布放和回收,方便生产和维护。
技术研发人员:王士昌,宋庆月,尹云龙,吴显辉,辛爱学,孙风凯
受保护的技术使用者:青岛蔚海明祥科技有限公司
技术研发日:20230130
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!