一种无人船定位巡航控制装置
本发明涉及无人船,具体为一种无人船定位巡航控制装置。
背景技术:
1、无人船定位巡航控制装置是一种用于实现无人船自主导航、定位和巡航的装置,无人船的控制系统通常在船体内,而传感器和其他外部组件则可能被安装在船体表面的适当位置。这有助于确保传感器能够获得准确的环境信息,同时保护内部的控制系统和关键组件,而为了给无人船内部的控制装置进行散热,一般都会在外部开设散热孔。
2、目前为给无人船的控制装置散热的散热孔一般是不具备自动清理机构的,因此在长时间使用或者长时间放置在外部,可能会导致散热孔被灰尘或者杂物堵住,而人工清理也只能进行定期清理,且人工清理费时费力,增加工作人员的工作负荷,同时在没有进行人工清理期间,堵住的散热孔导致散热效果减弱,从而容易导致船体内部的控制装置热量增加,继而降低了控制装置的使用寿命。
技术实现思路
1、针对现有技术的不足,本发明提供了一种无人船定位巡航控制装置,解决了无人船在长时间使用或者长时间放置在外部,可能会导致散热孔被灰尘或者杂物堵住,人工清理费时费力,同时在没有进行人工清理期间,堵住的散热孔导致散热效果减弱,继而降低了控制装置使用寿命的问题。
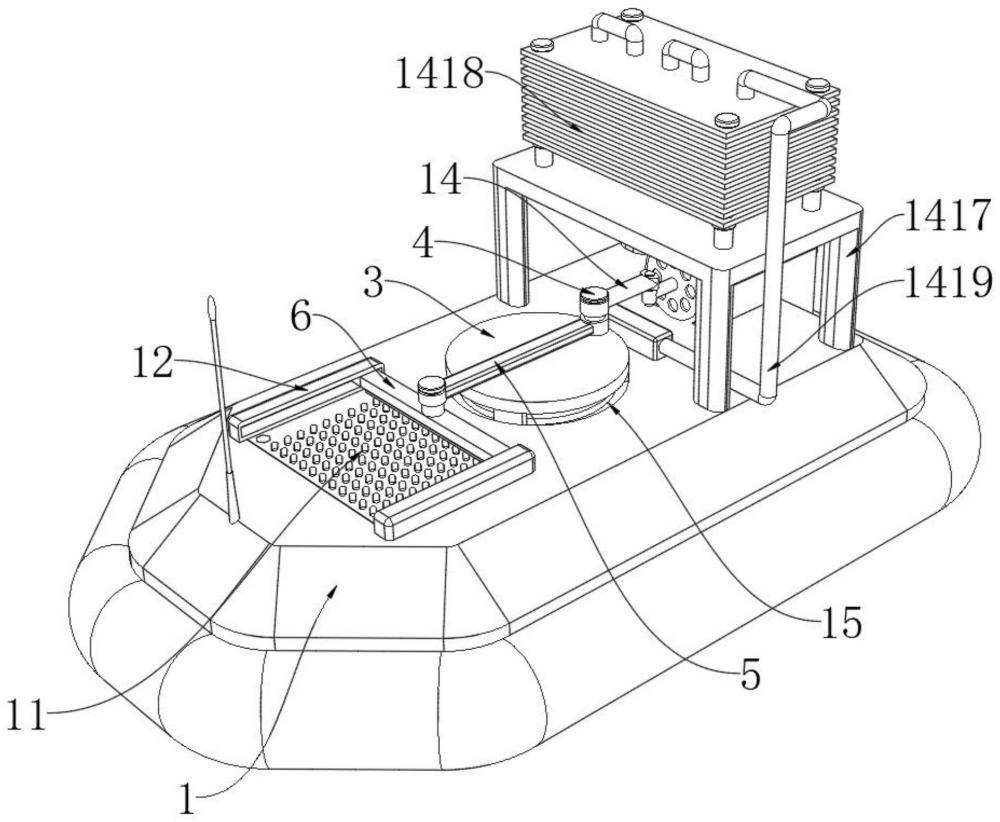
2、为实现以上目的,本发明通过以下技术方案予以实现:一种无人船定位巡航控制装置,包括船体,所述船体的内部固定连接有电机,所述电机的输出端固定连接有转动盘,所述转动盘的顶部固定连接有偏心柱,所述偏心柱的外部转动连接有连杆,所述连杆的另一端转动连接有外壳,所述外壳的内部固定连接有多个弹簧一,所述外壳的内部滑动连接有限位板,所述限位板的底部固定连接有连接板,所述连接板的底部固定连接有清洁刷,所述船体的顶部可拆卸连接有通风板,所述船体的顶部位于通风板的相对两侧均固定连接有限位导轨,所述外壳的左右两侧均固定连接有滑块,所述滑块滑动连接在限位导轨的内部,所述船体的顶部后侧固定连接有除湿降温机构。
3、优选的,所述除湿降温机构包括转动杆,所述转动杆的内部转动连接在偏心柱的外部,所述转动杆的另一端转动连接有推拉杆,所述推拉杆的另一端固定连接有活塞,所述船体的顶部后侧固定连接有固定筒,所述固定筒的顶部固定连接有固定块,所述固定块的内部开设有滑行槽,所述滑行槽的内部滑动连接有滑行块,所述滑行块的顶部固定连接有安装透气筒,所述安装透气筒的内部固定连接有电热丝,所述安装透气筒远离转动盘的一侧固定连接有连接管,所述连接管的另一端设置有连通组件,所述固定筒的顶部远离固定块的一端固定连接有单向阀一,所述单向阀一与所述连接管之间通过连通组件相连,所述船体的顶部远离通风板的一侧固定连接有安装架,所述安装架的顶部固定连接有散热鳍片,所述固定筒远离转动盘的一侧固定连接有通风管,所述通风管靠近固定筒的一侧固定连接有单向阀二,所述通风管远离固定筒的一端固定连接有通风头,所述通风头固定连接在船体的顶部。
4、优选的,所述连通组件包括安装帽,所述安装帽的顶部设置在连接管的底部,所述安装帽的内部顶端固定连接有多个弹簧二,所述安装帽的内部滑动连接有密封圈,多个所述弹簧二的底部均固定连接在密封圈的顶部,所述安装帽的内壁相对两侧均开设有卡合槽,所述单向阀的顶部固定连接有安装管,所述安装管的外部相对两侧均固定连接有卡柱,所述卡柱与所述卡合槽相卡合。
5、优选的,多个所述弹簧一的底部均固定连接在限位板的顶部,所述清洁刷的底部与所述通风板的顶部相接触。
6、优选的,所述转动盘的底部固定连接有多个滑动板,所述船体的顶端中部开设有滑动槽,所述滑动板的底部滑动连接在滑动槽的内部。
7、优选的,所述推拉杆贯穿固定筒靠近转动盘的一侧,所述通风头的底部贯穿船体的顶部。
8、优选的,所述活塞滑动连接在固定筒的内部,所述活塞的外部套设有橡胶套。
9、优选的,两个所述卡合槽在安装帽上呈中心对称分布,所述密封圈的外部套设有密封套。
10、优选的,所述滑行块的外部套设有防滑套,所述连接管为软管。
11、优选的,所述通风管的外部设置在散热鳍片的内部,所述单向阀的底部贯穿固定筒的顶部。
12、工作原理:无人船在使用的时候,启动电机,电机的输出端转动之后能够带动转动盘进行转动,转动盘进行转动之后能够带动偏心柱进行转动,偏心柱进行转动之后能够带动连杆的一端进行转动,另一端进行来回移动从而能够带动外壳进行来回移动,外壳进行来回移动的时候能够带动限位板进行来回移动,限位板进行来回移动的时候能够带动连接板进行来回移动,连接板进行来回移动的时候能够带动清洁刷进行来回移动,从而能够对通风板进行清理,继而能够防止通风板堵塞影响通风效果,在转动盘进行转动的同时能够带动转动杆进行转动,从而能够带动推拉杆进行来回移动,继而能够带动活塞进行来回移动,并且当活塞向转动盘的方向进行移动的时候单向阀二关闭,单向阀一开启,同时电热丝开启,从而能够将进入连接管内部的空气进行加热将空气中的水蒸气蒸发,从而能够实现对进入连接管内部的空气进行干燥,干燥的空气通过连通组件进入固定筒的内部,当活塞向远离转动盘的一侧进行移动的时候单向阀一关闭,此时将固定筒中的干燥的空气推入通风管的内部,并通过散热鳍片进行散热,使得通风管中的空气降温,再通过通风头进入船体的内部,从而能够为船体内部的控制装置进行散热,并且进入船体中的空气是经过干燥处理的空气,从而能够防止控制装置内部受潮,进行固定块的更换时,由于安装帽既能够在连接管的底部进行转动,又能够在连接管上进行转动,因此首先将安装帽向下按动,当卡柱滑动到卡合槽的顶部后进行转动,当卡柱转动到卡合槽的左侧时,便能够将安装帽从安装管上拆卸下来此时便能够将安装透气筒向靠近转动盘的一侧进行推动,从而能够带动滑行块滑动出滑行槽的内部,从而能够将安装透气筒及其内部的电热丝进行拆卸,安装时步骤相反即可,因此能够方便安装透气筒进行更换。
13、本发明提供了一种无人船定位巡航控制装置。具备以下有益效果:
14、1、本发明通过电机带动转动盘进行转动,从而能够带动连杆进行来回移动,继而能够带动外壳进行来回移动,从而能够带动清洁刷进行来回移动,因此实现了控制装置散热孔的自动清理,继而能够有效地防止散热孔堵塞,无需人工清理,省时省力,降低工作人员的工作负荷,同时也能够不影响无人船控制装置的散热,提高了无人船控制装置的使用寿命。
15、2、本发明通过活塞的来回移动能够不管的进行吸气,排气,并能够通过电热丝对空气进行加热,同时通过散热鳍片进行散热,保持进入无人船控制装置中的空气为干燥的冷风,因此能够避免直接水面上的湿润的空气直接进入无人船控制装置的内部,继而能够避免控制装置受潮,且能够保持良好的散热,保护了无人船控制装置。
技术特征:
1.一种无人船定位巡航控制装置,包括船体(1),其特征在于,所述船体(1)的内部固定连接有电机(2),所述电机(2)的输出端固定连接有转动盘(3),所述转动盘(3)的顶部固定连接有偏心柱(4),所述偏心柱(4)的外部转动连接有连杆(5),所述连杆(5)的另一端转动连接有外壳(6),所述外壳(6)的内部固定连接有多个弹簧一(7),所述外壳(6)的内部滑动连接有限位板(8),所述限位板(8)的底部固定连接有连接板(9),所述连接板(9)的底部固定连接有清洁刷(10),所述船体(1)的顶部可拆卸连接有通风板(11),所述船体(1)的顶部位于通风板(11)的相对两侧均固定连接有限位导轨(12),所述外壳(6)的左右两侧均固定连接有滑块(13),所述滑块(13)滑动连接在限位导轨(12)的内部,所述船体(1)的顶部后侧固定连接有除湿降温机构(14)。
2.根据权利要求1所述的一种无人船定位巡航控制装置,其特征在于,所述除湿降温机构(14)包括转动杆(1401),所述转动杆(1401)的内部转动连接在偏心柱(4)的外部,所述转动杆(1401)的另一端转动连接有推拉杆(1402),所述推拉杆(1402)的另一端固定连接有活塞(1404),所述船体(1)的顶部后侧固定连接有固定筒(1403),所述固定筒(1403)的顶部固定连接有固定块(1405),所述固定块(1405)的内部开设有滑行槽(1406),所述滑行槽(1406)的内部滑动连接有滑行块(1407),所述滑行块(1407)的顶部固定连接有安装透气筒(1408),所述安装透气筒(1408)的内部固定连接有电热丝(1409),所述安装透气筒(1408)远离转动盘(3)的一侧固定连接有连接管(1410),所述连接管(1410)的另一端设置有连通组件,所述固定筒(1403)的顶部远离固定块(1405)的一端固定连接有单向阀一(1421),所述单向阀一(1421)与所述连接管(1410)之间通过连通组件相连,所述船体(1)的顶部远离通风板(11)的一侧固定连接有安装架(1417),所述安装架(1417)的顶部固定连接有散热鳍片(1418),所述固定筒(1403)远离转动盘(3)的一侧固定连接有通风管(1419),所述通风管(1419)靠近固定筒(1403)的一侧固定连接有单向阀二(1422),所述通风管(1419)远离固定筒(1403)的一端固定连接有通风头(1420),所述通风头(1420)固定连接在船体(1)的顶部。
3.根据权利要求2所述的一种无人船定位巡航控制装置,其特征在于,所述连通组件包括安装帽(1411),所述安装帽(1411)的顶部设置在连接管(1410)的底部,所述安装帽(1411)的内部顶端固定连接有多个弹簧二(1412),所述安装帽(1411)的内部滑动连接有密封圈(1413),多个所述弹簧二(1412)的底部均固定连接在密封圈(1413)的顶部,所述安装帽(1411)的内壁相对两侧均开设有卡合槽(1414),所述单向阀(1421)的顶部固定连接有安装管(1415),所述安装管(1415)的外部相对两侧均固定连接有卡柱(1416),所述卡柱(1416)与所述卡合槽(1414)相卡合。
4.根据权利要求1所述的一种无人船定位巡航控制装置,其特征在于,多个所述弹簧一(7)的底部均固定连接在限位板(8)的顶部,所述清洁刷(10)的底部与所述通风板(11)的顶部相接触。
5.根据权利要求1所述的一种无人船定位巡航控制装置,其特征在于,所述转动盘(3)的底部固定连接有多个滑动板(16),所述船体(1)的顶端中部开设有滑动槽(15),所述滑动板(16)的底部滑动连接在滑动槽(15)的内部。
6.根据权利要求2所述的一种无人船定位巡航控制装置,其特征在于,所述推拉杆(1402)贯穿固定筒(1403)靠近转动盘(3)的一侧,所述通风头(1420)的底部贯穿船体(1)的顶部。
7.根据权利要求2所述的一种无人船定位巡航控制装置,其特征在于,所述活塞(1404)滑动连接在固定筒(1403)的内部,所述活塞(1404)的外部套设有橡胶套。
8.根据权利要求3所述的一种无人船定位巡航控制装置,其特征在于,两个所述卡合槽(1414)在安装帽(1411)上呈中心对称分布,所述密封圈(1413)的外部套设有密封套。
9.根据权利要求2所述的一种无人船定位巡航控制装置,其特征在于,所述滑行块(1407)的外部套设有防滑套,所述连接管(1410)为软管。
10.根据权利要求2所述的一种无人船定位巡航控制装置,其特征在于,所述通风管(1419)的外部设置在散热鳍片(1418)的内部,所述单向阀(1421)的底部贯穿固定筒(1403)的顶部。
技术总结
本申请涉及无人船技术领域,公开了一种无人船定位巡航控制装置,包括船体,所述船体的内部固定连接有电机,所述电机的输出端固定连接有转动盘,所述转动盘的顶部固定连接有偏心柱,所述偏心柱的外部转动连接有连杆,所述连杆的另一端转动连接有外壳,所述外壳的内部固定连接有多个弹簧一,所述外壳的内部滑动连接有限位板,所述限位板的底部固定连接有连接板,所述连接板的底部固定连接有清洁刷。通过电机带动转动盘进行转动,从而能够带动连杆进行来回移动,因此实现了控制装置散热孔的自动清理,无需人工清理,省时省力,降低工作人员的工作负荷,同时也能够不影响无人船控制装置的散热,提高了无人船控制装置的使用寿命。
技术研发人员:孔俊涛,李欢钊,杨洪,张傲东,帅康,冯洋,路露
受保护的技术使用者:常州大学怀德学院
技术研发日:
技术公布日:2024/3/31
- 还没有人留言评论。精彩留言会获得点赞!