被动式微重力模拟器的制作方法
[0001]
本发明涉及一种重力抵消系统,具体涉及一种被动式微重力模拟系统。
背景技术:
[0002]
地面微重力模拟以及重力抵消是伴随着航天技术发展而出现的一个新的研究领域,相比于数字仿真与理论分析,通过微重力模拟所得到的实验结果更具有真实性与可靠性,而相比于飞机失重、液体悬浮、风洞等传统的重力抵消方式,利用机械结构之间组合运动实现的被动式重力抵消具有成本低、可靠性高、持续时间长等优势。因此,地面微重力模拟对于保证航天器在轨可靠运行以及航天员在地面的任务训练都具有重要意义。
技术实现要素:
[0003]
本发明提供一种用于人体载荷多维运动的被动式微重力模拟装置,该系统解决了现有系统成本高、不能很好地长期可靠实现重力抵消的问题,能够站在微重力环境模拟角度,能够更加安全可靠地完成重力抵消的任务。
[0004]
为了达到上述目的,本发明提供了一种用于人体载荷的被动式微重力模拟装置,该系统包含:圆柱底座、套筒、平行四边形连杆、横轴、弹簧、滑轮、钢丝和可穿戴设备。
[0005]
其中,所述的套筒安装在圆柱底座上并与其间隙配合,可以自由旋转;所述的平行四边形连杆共有四组,两组对称安装在套筒上,其余两组安装在前述两组的前端,并借助横轴完成拼装;所述的弹簧一端固定在底座上,另一端与钢丝相连;所述的滑轮固定在平行四边形连杆结构的横轴上;所述的钢丝绕过特定的滑轮后连结在特定的横轴上;
[0006]
在处于重力抵消状态时,所述的弹簧、钢丝保持张紧以提供恒定的重力抵偿;
[0007]
在处于非重力抵消状态时,所述的弹簧与钢丝接触连接以防止弹簧张紧时间过长失效。
[0008]
优选地,所述的被动式微重力模拟装置,其特征在于:套筒安装在圆柱底座的圆柱形凸台上,可绕底座360度旋转。
[0009]
优选地,所述的被动式微重力模拟装置,其特征在于:四组平行四边形连杆通过横轴拼装成可伸展结构并可在空间自由移动。
[0010]
本发明提供的用于人体的被动式微重力模拟装置,解决了现有系统成本高、不能很好地长期可靠实现重力抵消的问题,具有以下优点:
[0011]
(1)本发明的方法为实现重力的被动式抵消,通过平行四连杆机构以及钢丝滑轮绕组、弹簧的组合,解决了理论上的零长弹簧问题,设计人体与机构随动机制,实现人体所受重力抵消不随人体位置与姿态改变而变化,提升了微重力模拟装置的可靠性;
[0012]
(2)本发明的方法在设计并生产完成后,使用mpu6050六轴加速度传感器对重力抵偿效果进行了数据采集,得到了与理论分析符合较好的数据,证明本发明可以很好地实现恒定重力抵消的目的;
[0013]
(3)本发明的系统通过圆柱底座支撑,通过其下焊接的钢制圆盘使得人体运动时
整体结构的稳定性有良好的保障,圆柱底座的重量可以起到配重的作用;
[0014]
(4)本发明的弹簧采用螺栓连接在圆柱底座上,由于工作状态下弹簧的拉紧为螺栓提供了预紧力,避免由于螺栓的松动发生意外,使人体的安全性有很大的提高。
附图说明
[0015]
图1为本发明用于人体的被动式微重力模拟装置的结构示意图。
[0016]
图2为本发明的平行四连杆的结构示意图。
[0017]
图3为本发明的原理示意图。
[0018]
图4为图1俯视图。
[0019]
图5为图1侧视图。
具体实施方式
[0020]
以下结合附图和实施例对本发明的技术方案做进一步的说明。可以理解的是,此处所描述的具体实施例仅仅用于解释相关发明,而非对该发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与发明相关的部分。
[0021]
下面将参考附图并结合实施例来详细说明本申请。
[0022]
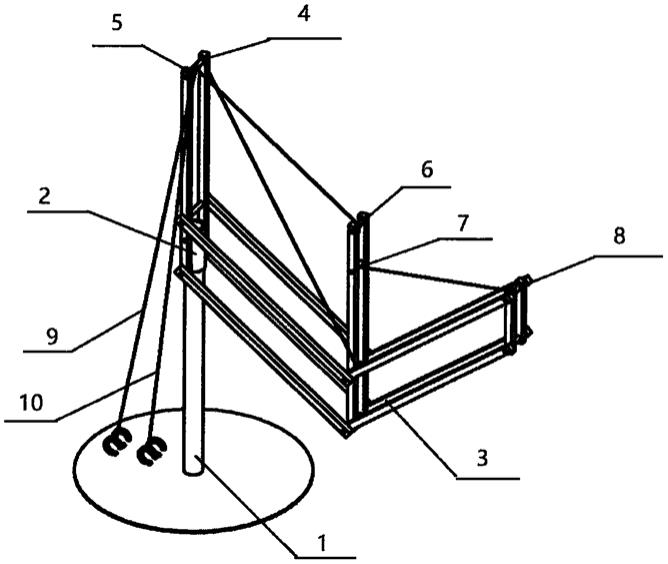
本实施例提供一种用于人体的被动式微重力模拟装置,如图1所示,为本发明用于人体的被动式微重力模拟装置的结构示意图,该系统包含,圆柱底座1,所述的圆柱底座1上端凸台套有套筒2,所述的套筒2连接有平行四边形连杆3,所述的平行四边形3通过横轴组合,所述的横轴上固定位置套有滑轮4、5、6、7、8,所述的滑轮4、5、6、7、8上绕有钢丝9、 10,所述的钢丝9两端分别连接弹簧11和圆柱底座1,所述的平行四边形3自由端固定有可穿戴设备。
[0023]
本实施例中的微重力模拟器是被动式的,通过钢丝滑轮绕组的结合,利用弹簧以及势能守恒原理,将固定在可穿戴设备里的人体重力全部或部分抵消,实现模拟微重力或小重力环境的效果。
[0024]
进一步的,如图2所示,该平行四连杆1为拼接式四连杆机构,其可随人体的运动而在一定范围内移动,为可穿戴设备和人体载荷提供安装面。
[0025]
进一步的,钢丝9的长度等于弹簧与底座固定节点到滑轮4的距离减去弹簧原长的长度;钢丝绳10的长度等于弹簧与底座固定节点到滑轮5的距离、滑轮5到滑轮6的距离、滑轮6 到滑轮7的距离、滑轮7到滑轮8的距离、滑轮7到可穿戴设备与平行四边形连杆结构固定节点的距离之和减去弹簧原长。
[0026]
如图3所示是被动式微重力模拟装置的原理简图,图中虚线为弹簧,m1、m2代表杆的总质量,各杆件均为均质杆,参数如图中标注。可以看出,机构整体的重力势能和弹簧的弹性势能之和为定值vt=vmg+vbg+vs=c。其中vmg是整个机构的重力势能,vbg是固连在机构上的试验者的重力势能,vs是两根弹簧的弹性势能,c是某确定的常数。由于该机构的目的是抵消人体全部或部分的重力,所以在人体的重力势能前加上所抵消重力的比例系数ρ,有 vt=vmg+ρ*vbg+vs=c。根据机构的参数调整,ρ是可以变化的,是人体感受到不同程度的重力抵消。将上式展开,可将总势能表示为两个角度θ1、θ2的函数,有vt=vmg+ρ *vbg+vs=c=c0+c1*cosθ1+c2c*osθ2。其中:c0=(2*h1+h2)*(m1+m2)*g+(h1-h2)ρ *m*g+(1/2)*
k1*(d1^2+l1^2)+(1/2)*k2*(d2^2+l2^2),c1=m1*l1*g+l1*(2*m2*g+ρ *m*g-k1*d1),c2=m2*l2*g+l2*(ρ*mg-k2*d2)。该微重力模拟装置的目的是抵消人体恒定的重力,在上式中表现为无论θ1、θ2的取值如何变化,所抵消重力的比例ρ总是恒定不变的。由于θ1、θ2的取值是任意的,即cosθ1、cosθ2的取值是任意的,为使上式之和vt为常数,有c1、c2=0,由此两个边界条件可以在一部分参数已知的情况下设计出满足抵消恒定重力的要求的机构。很显然每个个体的体重都是不同的,由于在其他参数确定的情况下,机构所能抵消的重力是恒定的,所以不同的人体所对应的比例系数ρ也是不同的,相应的体感也不同。可以根据上述推导出的公式来对弹簧的弹性系数k1、k2以及弹簧安装的位置d1、d2 进行选取,以使不同体重的人体可以体验到相同的重力抵消比例。
[0027]
综上所述,本实施例中提供的被动式微重力模拟装置可以实现恒定的全部或部分重力抵消。
[0028]
以上描述仅为本申请的较佳实施例以及对所运用技术原理的说明。本领域技术人员应当理解,本申请中所涉及的发明范围,并不限于上述技术特征的特定组合而成的技术方案,同时也应涵盖在不脱离所述发明构思的情况下,由上述技术特征或其等同特征进行任意组合而形成的其他技术方案。例如上述特征与本申请中公开的(但不限于)具有类似功能的技术特征进行互相替换而形成的技术方案。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1