一种可实现振幅自动变化的振翅机构的制作方法
[0001]
本发明涉及航行器领域,具体涉及一种在流体中,例如在空气或水中航行的振翅航行器,特别是一种可实现振幅自动变化的振翅机构。
背景技术:
[0002]
目前的振翅机方案很多,现有振翅多采用传统的四杆机构,机构复杂且不可随阻力自适应改变振幅,振翅机的输入转速很难与输出振幅完美比配,造成能源浪费。
技术实现要素:
[0003]
为解决上述问题,本发明提供一种可实现振幅自动变化的振翅机构,以解决目前的振翅机结构复杂,能耗大的问题。
[0004]
本发明提出一种可实现振幅自动变化的振翅机构,至少包括:机身,输入轴,输出端,约束系统,其特征是:输入轴至少由a构件与b构件通过运动副、运动链或两自由度连轴器的联接构成,b构件相对a构件至少有摆动或径向平动自由度,或者是,b构件相对a构件有摆动的同时有径向平动自由度;约束系统中至少包括前端及末端,末端相对前端至少有摆动或径向平动自由度,或者是,末端相对前端有摆动自由度又有径向平动自由度,末端相对前端有公转自由度同时有公转半径变化自由度;约束系统的前端与机身联接,约束系统的末端通过运动副与b构件相联接,约束系统为两自由度联轴器时,两自由度联轴器的两端分别为前端和末端,或者,约束系统是四杆机构,四杆机构的机架为前端,四杆机构的连杆为末端;输出端为约束系统的末端与振翅联接;b构件通过运动副约束,b构件的质心偏离转动轴线,或者是,b构件通过运动副约束,至少有一个与b构件转动轴线重合的平面将b构件划分为两部分,两部分的质心分别位于与b构件转动轴线垂直的两个平面上。
[0005]
进一步的,约束系统的前端与机身联接,约束系统的末端通过转动副与b构件相联接,约束系统为两自由度联轴器时,两自由度联轴器的两端分别为前端和末端,或者,约束系统是四杆机构,四杆机构的机架为前端,四杆机构的连杆为末端;输出端为约束系统的末端与振翅联接;b构件通过转动副约束,b构件的质心偏离转动轴线,或者是,b构件通过转动副约束,至少有一个与b构件转动轴线重合的平面将b构件划分为两部分,两部分的质心分别位于与b构件转动轴线垂直的两个平面上。
[0006]
进一步的,由于b构件与其它构件的联接和位置关系及质量分布特性,b构件为动不平衡构件,在转动时由于离心力的作用b构件产生摆动力矩或径向力,在输入轴的驱动下,b构件带动输出端转动,进一步的,输出端带动联接在输出端的振翅转动,振翅的转动半径或振幅随转动速度及环境流体阻力的变化而变化,也就是,输出端的振幅与输入轴转速成正比,与环境流体密度或阻力成反比;从而实现振翅振幅自动变化,达到输入转速与输出振幅的良好匹配,及简化结构的目的。
[0007]
进一步的,振翅航行器还包括:设置在机身上并连接所述约束系统的角度调整机构,所述角度调整机构为蜗轮蜗杆机构、或步进电机与约束系统的前端联接。
[0008]
进一步的,所述振翅航行器还包括:与输出端的b构件固定联接的原动机,原动机输出轴安装有质心偏离电机输出轴轴线的构件或偏心轴。
[0009]
进一步的,所述双自由度联轴器是,轴线可移动或弯曲传动的联轴器。用于联接不同轴线和不在同一方向或有相对运动的两轴以传递旋转运动和扭矩;能把旋转运动和扭矩灵活地传到任意位置。双自由度联轴器可以是实心或空心轴,双自由度联轴器分为刚性联轴器,包含柔性或弹性材料的联轴器,单一柔性或弹性材料的联轴器,或者是,串联多构件通过运动副或弹性构件联接构成;例如:软轴联轴器、弹性轴联轴器、万向节联轴器、十字滑块联轴器、囚笼万向联轴器、簧片联轴器、轮胎联轴器、sfc联轴器等。
附图说明
[0010]
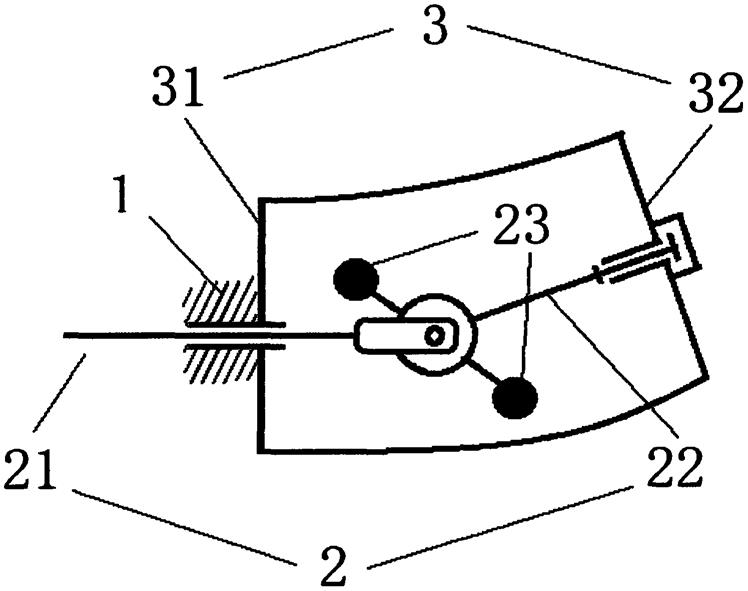
图1为本发明实施例1的振翅结构示意图;
[0011]
图2为本发明实施例2的振翅结构示意图;
[0012]
图3为本发明实施例3的振翅结构示意图;
[0013]
附图标号说明:
[0014]
1、机身;2、输入轴;21、a构件;22、b构件;23、配重;3、约束系统
[0015]
31、前端;32、末端;
具体实施方式
[0016]
为了对本发明的技术特征、目的和效果有更加清楚的理解,现对照附图说明本发明。
[0017]
实施例1:包含有摆动副的自适应振翅机构;
[0018]
如图1所示,本实施例的振翅机构包括:机身1、输入轴2、约束系统3,输入轴2包括a构件21、b构件22,a构件21通过摆动副与b构件22联接,约束系统3为管状柔性连轴器包括前端31、末端32,前端31与机身1固定联接,末端32通过转动副与b构件22联接,a构件21通过转动副与机身联接,末端32同时也是输出端与振翅联接,配重23为增强b构件22的动不平衡特性;其中,所述管状柔性连轴器可以是其它具有公转和自转自由度的双自由度连轴器。
[0019]
图1中,在输入轴2的驱动下,b构件22带动输出端转动,进一步的,输出端带动联接在输出端的振翅转动,振翅的转动半径或振幅随转动速度及环境流体阻力的变化而变化。
[0020]
实施例2:包含有平动副的自适应振翅机构
[0021]
如图2所示,本实施例的振翅机构包括:机身1、输入轴2、约束系统3,输入轴2包括a构件21、b构件22,a构件21通过平动副与b构件22联接,约束系统3为管状柔性连轴器包括前端31、末端32,前端31与机身1固定联接,末端32通过转动副与b构件22联接,a构件21通过转动副与机身联接,末端32同时也是输出端与振翅联接其中,所述管状柔性连轴器可以是其它具有公转和自转自由度的双自由度连轴器。
[0022]
实施例3:包含有四杆机构的自适应振翅机构
[0023]
如图3所示,本实施例的振翅机构包括:机身1、输入轴2、约束系统3,输入轴2包括a构件21、b构件22,a构件21通过移动副与b构件22联接,约束系统3为四杆机构包括前端31、末端32,前端31与机身1固定联接,末端32通过转动副与b构件22联接,a构件21通过转动副与机身联接,末端32同时也是输出端与振翅联接。
[0024]
本实施例由刚性构件构成,没有形变损耗,稳定性好。
[0025]
以上所述仅为本发明示意性的具体实施方式,并非用以限定本发明的范围。为本发明的各组成部分在不冲突的条件下可以相互组合,任何本领域的技术人员,在不脱离本发明的构思和原则的前提下所作出的等同变化与修改,均应属于本发明保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1