用于流体操纵的系统和方法与流程
用于流体操纵的系统和方法
1.本申请要求于2018年10月22日提交的美国临时申请第62/749,109号和于2018年10月28日提交的美国临时申请第62/751,623号的权益。本申请涉及于2018年8月10日提交的美国申请第16/101,391号,该申请要求于2017年8月10日提交的美国临时申请第62/543,371号、于2018年6月15日提交的美国临时申请第62/685,295号、2018年7月27日提交的美国临时申请第62/703,898号以及于2018年8月6日提交的美国临时申请第62/714,778号的权益。上面列出的申请中的每一个通过引用并入本文。
背景技术:
2.许多流体相互作用装置在低自由流流速下具有较大功耗。例如,对于直升机,悬停时所需的功率可以是标称水平巡航时所消耗的功率的两倍。传统固定翼飞行器的螺旋桨或商用喷气式客机的涡轮风扇在较小自由流流速(诸如起飞时发现的速度)下比在较大自由流流速(诸如在标称水平巡航时发现的速度)下针对给定的推力大小消耗更大功率量。同样,传统的开放式旋翼风力涡轮机能够从流体中提取的功率量不一定小。
3.试图减轻与相对低的自由流流速大小相关的推力产生或功率提取的低效率问题在效果上是有限的。例如,可以使用导管来增大螺旋桨、直升机旋翼或风力涡轮机的局部自由流流速。这种增大的幅度由导管的几何形状决定,而导管的几何形状又受到约束条件(诸如与流动分离有关的约束条件)的严格限制。对于较小自由流流速,即最需要导管的情况下,这些约束条件尤其严格。由于这些约束条件,只能通过具有较大扩压器的导管来对局部自由流流动产生较大影响,例如,这可能与过大的润湿面积和增加的重量相关联。
4.相对于流体移动的物体(诸如机身)通常会遭受摩擦力或牵引阻力。在现有技术中,试图最小化该牵引阻力通常局限于确保物体的润湿表面尽可能光滑。在某些情况下,此类光滑度可以有利于润湿表面的至少一部分上的层流,这可以有助于减小粘性牵引阻力。然而,即使在存在层流的情况下,该牵引阻力也是相当大的。
5.以超音速或跨音速的速度在空中行进的飞机或其部件通常会引起冲击波,这会给飞行器带来相当大的阻力。在水中行使的船舶或其部件通常会引起表面波或重力波,这也可能给飞行器带来相当大的阻力。期望减小波阻力对飞行器或飞行器部件产生的总阻力。
技术实现要素:
6.本文公开的一些实施例涉及流体相互作用装置,如飞机、轮船或陆地车辆,其容易受到阻力并且尤其受到波阻力。
7.一些实施例涉及一种用于减小波阻力的系统。
8.一些实施例涉及一种用于减小波阻力的方法。
9.在一些实施例中,外表面可以被配置成用于接收流体的外部流体流动。
10.在一些实施例中,通道可以联接到外表面并且被配置成用于接收流体的内部流体流动。
11.在一些实施例中,通道可以包括流体入口和流体出口。
12.在一些实施例中,通道可以被配置成操纵内部流体流动以减小波阻力。
13.在一些实施例中,通道可以包括第一流体操纵装置(“fma”),该第一流体操纵装置可被配置成接收流体入口下游的内部流体流动,并且可以进一步被配置成改变通道内的流体流动的速度和压力。
14.在一些实施例中,通道可以包括压力容纳装置(“pca”),该压力容纳装置可被配置成接收第一fma下游的内部流体流动。
15.在一些实施例中,通道可以包括第二fma,其可被配置成接收pca下游和流体出口上游的内部流体流动。
16.在一些实施例中,第二fma可被配置成进一步改变内部流体流动的速度和压力。
17.在一些实施例中,自由流可以具有大于自由流内的波的波速的自由流速度。
18.在一些实施例中,第一fma和/或第二fma可以包括以下中的一个或多个:收缩导管;扩缩导管;渐扩导管;螺旋桨;推力生成装置;和/或体力生成装置。
19.在一些实施例中,流体可以是可压缩的。
20.在一些实施例中,流体可以是气体,其可以是空气、氮气或二氧化碳。
21.在一些实施例中,第一fma可被配置成使内部流体流动减速并相对于自由流增大压力。
22.在一些实施例中,第一fma可被配置成将内部流体流动减速至亚音速流体速度。
23.在一些实施例中,第一fma可被配置成将内部流体流动减速至跨音速速度。
24.在一些实施例中,第一fma可被配置成将内部流体流动减速至较低超音速速度。
25.在一些实施例中,第二fma可被配置成使内部流体流动加速并相对于自由流降低压力。
26.在一些实施例中,第二fma可被配置成将内部流体流动加速至基本上等于自由流速度的速度。
27.在一些实施例中,第二fma可被配置成将内部流体流动加速至大于自由流速度的速度。
28.在一些实施例中,第二fma可被配置成将内部流体流动加速至小于自由流速度。
29.在一些实施例中,流体可以基本上是不可压缩的。
30.在一些实施例中,流体可以是水。
31.在一些实施例中,第一fma可被配置成使内部流体流动加速并相对于自由流降低内部流体流动的压力,从而与等效的自由流横截面积相比,减小离开第一fma并进入pca的内部流体流动的横截面积。
32.在一些实施例中,第一fma可被配置成使内部流体流动加速,从而减小含有系统的飞行器上的总阻力,该总阻力可以包括波阻力。
33.在一些实施例中,第二fma可被配置成使内部流体流动减速并相对于自由流增大内部流体流动的压力,从而增大离开第二fma的内部流体流动的横截面积。
34.在一些实施例中,第二fma可被配置成将内部流体流动减速至基本上等于自由流速度的速度的速度。
35.在一些实施例中,第二fma可被配置成将内部流体流动减速至大于自由流速度的速度。
36.在一些实施例中,第二fma可被配置成将内部流体流动减速至小于自由流速度的速度。
37.在一些实施例中,pca可被配置成维持pca内的内部流体流动与外表面外部的自由流之间的压力差。
38.在一些实施例中,pca可以包括具有圆形、矩形、椭圆形或多边形横截面的通道,和/或直边段、弯道、肘关节或转弯。
39.在一些实施例中,pca可以包括机翼,该机翼被配置成生成升力并将净动量传递到pca内的流体中。
40.在一些实施例中,pca可以包括机身。
41.在一些实施例中,pca可以包括以下中的一个或多个:意向性动量承载装置、意向性动量释放装置、涡轮轴发动机、涡轮风扇发动机、涡轮螺旋桨发动机、涡轮喷气发动机、冲压发动机、推力装置、阻力装置、泵喷气机、螺旋桨和/或加力燃烧器。
42.在一些实施例中,pca可以包括第一推力装置,其中第一推力装置可被配置成在标称操作需求期间向局部自由流施加第一诱导速度。第一推力装置可以产生流管。
43.在一些实施例中,pca可以包括第二推力装置。第二推力装置可以位于流管的下游部分。第二推力装置可被配置成向局部自由流施加第二诱导速度。在第二推力装置的位置处的第二诱导速度可以具有与在第二推力装置的位置处的第一诱导速度的方向相反的方向上的分量。
44.在一些实施例中,第一推力装置和/或第二推力装置可以包括螺旋桨。
45.在一些实施例中,由第一推力装置或第二推力装置中的一个提取的功率的至少一部分可以被引导为另一推力装置的功率。
46.在一些实施例中,外表面和内表面之间的体积可以是飞行器的至少一部分。
47.在一些实施例中,外表面和内表面可被配置成减小自由流流动中的波阻力的影响。
48.在一些实施例中,外表面可以基本上平行于自由流流动线。
49.在一些实施例中,外表面可以是环形圆柱体,其中第一fma可以位于圆柱体的上游端,并且第二fma可以位于圆柱体的下游端。
50.在一些实施例中,飞行器的外表面可以是锥形圆柱体的形状,其中圆柱体的半径可以在下游方向上减小。
51.在一些实施例中,当沿自由流方向观察时,外表面的横截面积可以是圆形、椭圆形、矩形或多边形。
52.在一些实施例中,飞行器可被配置成垂直起飞并且标称操作而不会引起大量的波阻力。
53.在一些实施例中,飞行器可被配置成在水平巡航中以亚音速和/或超音速飞行而不会引起大量的波阻力。
54.在一些实施例中,外表面和内表面可以形成意向性动量承载装置,并且系统还可以包括边界装置。imca可以相对于自由流速度降低边界装置的局部自由流速度。
55.在一些实施例中,边界装置的局部自由流流速的降低可以是高于局部自由流流体内的波速的流速的降低
56.在一些实施例中,边界装置的局部自由流速度可以减小至可以基本上等于局部自由流内的波速的速度。
57.在一些实施例中,边界装置的局部自由流速度可以减小至小于局部自由流内的波速的速度。
58.在一些实施例中,边界装置的局部自由流速度可以减小至边界装置的局部自由流内为超音速的速度。
59.在一些实施例中,边界装置的局部自由流速度可以减小至边界装置的局部自由流内为跨音速的速度。
60.在一些实施例中,边界装置的局部自由流速度可以减小至边界装置的局部自由流内为亚音速的速度。
61.在一些实施例中,边界装置可以包括机身或船体
62.在一些实施例中,边界装置可以包括机翼
63.在一些实施例中,边界装置可以包括第三fma,其可被配置成向第三fia的远尾流传递净诱导速度。
64.在一些实施例中,第三fma的远尾流的至少一部分可以位于通道内,并且由于通道上游、下游和第三fia附近的所述局部自由流速度降低而处于小于自由流速度的局部自由流速度。
65.在一些实施例中,由第三fia传递到第三fma的远尾流中的诱导速度可以具有垂直于第三fma下游的pca内的局部自由流流动的非零净分量。
66.在一些实施例中,第三fia可以是机翼,其可被配置成在标称水平巡航操作期间生成升力。
67.在一些实施例中,机翼的远尾流的至少一部分可以位于通道内局部自由流流动减小的区域内。
68.在一些实施例中,机翼的远尾流可以延伸到通道出口的外部和下游的自由流中;翼展可以小于在机翼的位置处的通道的有效直径的一半;和/或翼展可以小于在机翼的位置处的通道的有效直径的四分之一。
69.在一些实施例中,翼展可以小于在机翼的位置处的通道的有效直径的十分之一。
70.在一些实施例中,可以由第三fia传递到第三fma的远尾流的诱导速度可以具有平行于局部自由流流动的非零净分量。
71.在一些实施例中,第三fia可以包括机身或螺旋桨,并且可被配置成在标称水平巡航操作期间生成推力或阻力。
72.在一些实施例中,边界装置可以位于由imca的前缘和后缘形成的流管内。
73.在一些实施例中,可以提供第一fma。
74.在一些实施例中,可以提供第二fma,其可以至少部分地在第一fma的下游流管内。
75.在一些实施例中,可以提供压力容纳装置(“pca”),并且可以将其配置成至少部分地包围穿过第一fma和第二fma两者的流管。
76.在一些实施例中,流体可以是可压缩的,并且第一fma可以使流体减速并增大流体的压力,并且第二fma可以使流体加速并降低流体的压力,并且可以在pca内提供机翼,使得与自由流相比,以较低速度、较高压力流态生成升力。
77.在一些实施例中,流体可以是不可压缩的,并且第一fma可以使流体加速并降低流体的压力,并且第二fma可以使流体减速并增大流体的压力,并且较低压力和较低横截面积的流可以经由pca通过飞行器从第一fma传输到第二fma,使得飞行器生成较少的波阻力。
附图说明
78.图1和图2是现有技术推力装置的剖视图。
79.图3是根据一些实施例的意向性流体操纵装置(“ifma”)配置的剖视图。
80.图4是根据一些实施例的ifma配置的剖视图。
81.图5是现有技术流体操纵装置的剖视图。
82.图6是根据一些实施例的ifma配置的剖视图。
83.图7是根据一些实施例的ifma配置的剖视图。
84.图8和图9分别是根据一些实施例的ifma配置的剖视图和前视图。
85.图10、图11、图12和图13分别是根据一些实施例的ifma配置的透视图、侧视图、俯视图和后视图。
86.图14是根据一些实施例的ifma配置的剖视图、透视图和斜视图。
87.图15至图18是根据一些实施例的各种ifma配置的斜视图。
88.图19至图21是根据一些实施例的各种ifma配置的侧视图。
89.图22是根据一些实施例的导管装置的剖视图。
90.图23是根据一些实施例的导管装置的剖视图。
91.图24至图28是图24的导管装置的剖视图。
92.图29是根据一些实施例的导管装置的剖视图。
93.图30和图31是根据一些实施例的用于各种操作模式的图29的导管装置的剖视图。
具体实施方式
94.术语通道的“有效直径”定义为通道的横截面积除以数值pi的平方根的两倍,其中在通道中的指定位置处测量横截面积。
95.本文所用的术语“流体”涵盖表现出流体性质的所有类型的材料。一种此类性质是组成颗粒相对于彼此移动的能力。例如,它可以指的是诸如水之类的液体,或者如空气、氮气或二氧化碳之类的气体。应当注意,流体可以同时包含几种不同类型和种类的流体,诸如由几种气体组成的空气。除非特别说明,为了简单起见,不同流体的组合仍然称为“流体”。
96.术语“自由流流动”定义为相对于特定点的理论流动,如果物体(诸如装置的组件)不与流体相互作用,就会发生该理论流动。因此,它也可以称为全局自由流流动。装置的组件可以是飞行器(诸如飞机或船舶)或不同类型的流体操纵装置(诸如风力涡轮机)或者例如此类组件的任何部分。自由流流动可以包含惯性空间中特定点的运动的贡献,诸如飞行器在惯性空间中的运动。它还可以包含惯性空间中流体运动的贡献,诸如风或气流。不同的特定点可以经历不同的自由流流动。例如,装置可以转动,使得装置上的不同点在惯性空间中以不同的速度移动,并且在惯性空间中理论上静止的流体中经历不同的自由流流速。
97.术语“局部自由流流动”定义为相对于特定装置的理论流动,如果只有特定装置不与流体相互作用,就会发生该理论流动。局部自由流流动包含自由流流动的贡献以及由于
与流体相互作用的其它装置(诸如组件的其余部分的那些装置)引起的贡献。例如,由水平固定机翼产生的气流下洗可能会影响相对于安装在机翼下游的水平稳定器的局部自由流流速大小和方向。
[0098]“流体操纵装置”或fma定义为操纵流体性质的装置。例如,对于特定情形或边界条件,fma可以相对于自由流流速的大小来改变流体元的流速的大小。在另一实例中,对于特定情形,fma可以相对于自由流流速方向来改变流体元的流体流速的方向。对流体流动的这种影响可以是意向性的或非意向性的。当对流体的至少一些影响是意向性的时,fma可以进一步分类为“意向性流体操纵装置”或ifma。对流体流动的意向性影响只能局限于一些ifma,如在下面定义的“意向性动量承载装置”或imca的情况下。对于其它ifma,对流体流动的意向性影响也可能会发生在远尾流中,如在“意向性动量释放装置”或imsa的情况下。这些定义将在下面的段落中进行阐明。
[0099]
由于动量释放的意向性性质,并且imsa也可以称为“推力装置”或ta,其定义为被配置成在标称操作期间向流体施加意向性动量变化率的任何装置。ta的一个实例是传统螺旋桨或直升机主旋翼。在标称恒速巡航期间提供升力的固定翼飞行器的机翼也可以视为推力装置。还有许多其它可能类型的ta可用。例如,动量变化率可以由ta通过电磁力施加到流体上。例如,ta可以是霍尔效应推进器或磁流体动力(mhd)驱动器。福伊特
‑
施耐德推进器、回旋陀螺仪或类似设备也是ta的实例。
[0100]
在上述推力装置定义中,对流体施加意向性动量变化率的要求可以以几种方式来描述。例如,考虑将推力装置与装置组件中的其它流体操纵装置隔离。例如,考虑将机翼与固定翼飞行器的其余部分隔离。或者,考虑将直升机主旋翼与传统直升机的其余部分隔离。在称为“隔离情况”的理论情况下,推力装置视为是隔离的,并且如下定义或表征:在标称操作条件下,相对于推力装置在远尾流中存在意向性的非零诱导流。
[0101]
在某些情况下,标称操作条件可能涉及在空间和时间上均匀的自由流流速大小和方向。在某些情况下,在恒速巡航期间的操作条件可以描述为标称操作条件。在这种标称操作条件下,远尾流位于离推力装置无限远的距离处。换言之,与自由流流场相比,推力装置对离推力装置无限远的流场具有意向性的、不可忽略的影响。
[0102]
本文所定义并使用的术语“意向性”是指要求动量变化率是有用的或有意的。例如,在上述隔离情况下,有用的动量变化率可以有助于流体元在远尾流中的平均诱导速度,其中该速度在与预期推力或升力方向相反的方向上具有非零分量。对于一些推力装置,流体元在远尾流中的平均诱导速度在与预期推力或升力方向相反的方向上具有相当大的分量。与升力或推力产生相关的固定翼或直升机主旋翼的远尾流诱导流动视为是意向性的。在推力装置附近的流体动量的相关变化率也视为是意向性的。推力装置对远尾流的意向性影响不同于对远尾流中流体流场的非意向性的、无用的或反作用的影响,这种影响可能与例如作用在推力装置的某些元件上的型阻、压力阻力相关联。即,与数学上消除了这些影响的理论情况相比,如果其它条件相同,这些非意向性影响不必要地增大了功耗。
[0103]
也可以以另一种方式来描述给流体施加意向性动量变化率的要求。例如,推力装置也可以定义为可视为在普朗特升力线理论的简化框架中意向性地释放涡流的任何装置。因此,推力装置、或ta、或imsa也可以描述为“意向性涡流释放装置”或ivsa。应当注意,升力线理论的框架应仅视为参考或指导,因为它依赖于简化假设,诸如无粘性和不可压缩流动。
由推力装置意向性或有意释放的涡流通过向流体施加动量变化率而有助于作用在推力装置上的升力或推力。当在标称操作条件的上述隔离情况下中考虑推力装置时,意向性释放的涡流也存在于离推力装置无限远的距离处,在该处产生意向性诱导流动。换言之,存在由于推力装置或由推力装置产生的非零意向性远尾流诱导流速。应当注意,在某些模型中,诸如考虑粘性阻力的数学模型或理论释放涡流形式的边界层效应,推力装置也可以视为非意向性地释放涡流。非意向性涡流释放是指不是有意释放的任何涡流,即没有执行或有助于诸如产生升力或推力等有用功能的任何涡流。
[0104]
意向性动量承载装置或imca是流体操纵装置,这种流体操纵装置在隔离情况下考虑时不会意向性地将动量释放到远尾流中。imca的一个实例是导管或传统的管状或雪茄状的轴对称机身。机身通过意向性地偏转机身周围的气流来改变自由流流动,这也增大了在隔离情况下机身附近流动速度的大小,在这种隔离情况下将机身视为是与标称操作条件(诸如恒速巡航)的任何其它流体操纵装置(诸如机翼)隔离。上述的流动的意向性偏转局限于机身附近。因此,机身附近的流体元经历意向性的局部动量变化率。在理想情况下,对在离机身无限远距离处的流体流动没有影响。换言之,机身对流体流动没有意向性远尾流效应。在机身附近可能存在流体的非意向性动量变化率,与自由流流动相比,这也可能与在隔离情况下离机身无限距离处的流体元的非意向性动量变化相关联。例如,远尾流中流体流动的此类非意向性变化可以由型阻效应引起。
[0105]
同样,导管通过意向性改变导管附近的流速大小来改变自由流流动。例如,导管可被配置成相对于在标称操作条件的隔离情况下的自由流流动,减小圆形导管中心处的流体元的流速大小。在这种情况下,标称操作条件可以指平行于导管的对称中心轴线的恒定且均匀的自由流流速。这种意向性变化仅局限于导管附近,并且在离导管中心的无限距离处收敛到可忽略的值。因此,导管对流体流动没有意向性远尾流影响,即,由于导管与流体的相互作用,不存在流体元的远尾流非意向性诱导流速。如前所述,由于牵引阻力或瞬态效应,可能存在远尾流中流体流动的非意向变化,以及导管附近的流体的相关联的非意向性动量变化率。
[0106]
imca也可以在升力线理论的简化框架中描述。imca可以视为具有封闭或界限涡度。因此,imca也可以视为“意向性涡流承载装置”或ivca。例如,轴向对称的圆形导管对流体的意向性影响可以建模为圆形涡环、或二维或三维连续涡度分布、或逐渐变小的离散涡环。注意,在标称操作条件下,没有意向性涡度释放到流体中,其中涡量的大小在时间上是恒定的并且沿着涡环的圆周是均匀的。同样,也可以将机身对流体流动的意向性影响建模为包含在机身内或位于机身表面(即机身与流体之间的界面)上的三维连续涡度分布。
[0107]
imsa的“诱导功率”是与流体的意向性动量变化率相关联的流体能量变化率。任何其它功耗都计入“零升力功率”或“轮廓功率”。应当注意,在这种情况下,术语“升力”也包含推力。应当注意,imca不会消耗任何诱导功率。与纯imca相关联的任何功率损耗均视为轮廓功率损耗。imsa能够消耗诱导功率,在这种情况下,通过流体操纵装置对流体进行意向性做功。例如,飞行器或船舶的螺旋桨、或传统固定翼飞行器的固定翼会导致诱导功率消耗或者与诱导功率消耗相关联。imsa还能够回收诱导功率,在这种情况下,通过流体对流体操纵装置进行意向性做功。例如,由风力涡轮机生成的功率可以视为诱导功率。
[0108]
在向流体施加动量变化率的过程中,流体操纵装置可以相对于局部自由流速度来
改变流速。这种速度变化是“气流下洗”或“诱导速度”。应当注意,例如,诱导速度可以指向下游或上游,或垂直于气流。诱导速度可以由imsa或imca生成。在后一种情况下,诱导速度是局部的,即限于imca附近。在这些术语中,imsa也可以表征为一种装置,该装置在隔离情况下向远尾流贡献意向性诱导速度。应当注意,当同时考虑两个imsa时,一个imsa的诱导速度贡献可以被另一个imsa抵消。
[0109]
在下面的段落中以及在图1和图2的上下文中,将对现有技术中使用的几种装置和方法进行论述。
[0110]
图1是现有技术ta的剖视图。图示了螺旋桨1,其中螺旋桨1的推力指向附图的顶部,如推力矢量39所示。在所示的操作条件下,存在从附图的顶部流向底部的非零自由流流动,如箭头40所示。
[0111]
虚线示意性地表示自由流流动与流经旋翼桨盘的流动之间的近似边界2。位于边界上的线可以描述为流线,并且由边界包围的体积可以描述为流管。应当注意,附图中所示的边界仅是特定操作条件的实例。对于所描绘的ta的其它操作条件或操作模式,诸如悬停或从自由流流动(诸如凤或水流)中提取能量,边界的形状可以是大不相同的。在螺旋桨前方远处的自由流中,流动大约相当于自由流流动。
[0112]
流体的这种状态由图1中的工位3表示。在螺旋桨处的流体的特性由工位4封装。远尾流中的流动或远在螺旋桨下游的自由流由工位5表示。由于螺旋桨加速了流动,因此流管的面积从工位3到工位4以及从工位4到工位5减小。
[0113]
在工位5处,流动具有比自由流流动(诸如在工位3处发现的流动)更大的速度大小,而在传统简单动量理论的框架中,可以假定流管内部的流动压力已经返回到自由流压力。在工位5处的较大速度指示由于螺旋桨加速流动并经受相等且相反的力或推力而导致的流体动量的增大。速度越高,流体中的动能也越大,在上述框架中,动能表示提供推力所需的功率。
[0114]
应当注意,简单动量理论仅用作描述使用ta的升力基本原理的框架,并且通常包含在该理论内的假设不旨在应用于实施例或限制范围。例如,气流下洗的分布通常不需要在流管的横截面上恒定。应当注意,在每个工位处绘制的流管半径是近似的,并且仅旨在指示流管的一般形状。
[0115]
螺旋桨的剖视图示出了第一螺旋桨叶片6和第二螺旋桨叶片7。第一螺旋桨叶片6的后缘9和第二螺旋桨叶片7的前缘10也是可见的。在含有螺旋桨的所有附图中,示出了相似的配置。
[0116]
图2是另一现有技术ta的剖视图。图示了导管螺旋桨,其中螺旋桨11的推力指向附图的顶部,如推力矢量41所示。在所示的操作条件下,存在从附图的顶部流向底部的非零自由流流动,如箭头42所示。存在由导管16产生的附加推力,该导管16具有前缘17和后缘18以及横截面19。与图1相似,存在流管边界12,该流管边界12具有远上游工位13、在旋翼处的工位14和远尾流工位15。导管16在周向上包围螺旋桨11。
[0117]
根据一些实施例,提供了一种装置和方法,该装置和方法可以比现有技术中采用的方法更有效地改变流动。该改变可以参考但不限于流动中指定位置处的流速,并且可以应用于但不限于推力的生成。
[0118]
该方法包含:提供具有上游推力装置的推力装置组件,该上游推力装置配置为在
标称操作期间相对于自由流流动在第一方向上产生预期的力或推力,并且进一步提供具有至少一个下游推力装置的推力装置组件,其中该下游推力装置至少部分地设置在上游推力装置的下游流管的至少一部分中,以及其中该下游推力装置配置为在上游推力装置的流管中的下游推力装置的位置处产生推力,该推力具有平行于上游推力装置的诱导速度矢量的方向的至少一个矢量分量,其中下游推力装置的推力在上游推力装置的流管与下游推力装置的流管之间的至少一部分重叠区域上满足该方向标准。推力装置组件可以包括至少两个推力装置。
[0119]
应当注意,流管可以通过外部提升装置或推力装置来弯曲。在某些情况下,上游推力装置在下游推力装置的位置处的诱导速度矢量不再需要与上游推力装置受到的推力对准。在某些情况下,也可以不再与上游推力装置在上游推力装置的位置处的诱导速度矢量对准。下游推力装置在下游推力装置的位置处的诱导速度矢量配置为具有与上游推力装置在该位置处的诱导速度矢量相反的方向上至少一个分量。因此,下游推力装置受到的推力不必具有在上游推力装置的推力的相反方向上的分量。
[0120]
可替代地,该方法包含:提供具有上游推力装置的推力装置组件,该上游推力装置配置为相对于自由流流速矢量在至少预期方向上施加第一动量变化率,并且进一步提供具有至少一个下游推力装置的推力装置组件,其中该下游推力装置至少部分地设置在上游推力装置的下游流管的至少一部分中,以及其中该下游推力装置配置为对上游推力装置的流管中的流体施加第二动量变化率,其中对于上游推力装置的流管与下游推力装置的流管之间的至少一部分重叠区域,该第二动量变化率的方向具有第一动量变化率对上游推力装置的流管中的流体的影响的相反方向上的至少一个分量。
[0121]
可替代地,该方法包含:提供具有上游推力装置的推力装置组件,该上游推力装置配置为从流体中提取预期量的诱导功率,并且进一步提供具有至少一个下游推力装置的推力装置组件,其中该下游推力装置至少部分地设置在上游推力装置的下游流管的至少一部分中,以及其中该下游推力装置配置为在上游推力装置的流管与下游推力装置的流管之间的至少一部分重叠区域上将预期量的诱导功率输送至流体。
[0122]
可替代地,该方法包含:提供具有上游推力装置的推力装置组件,该上游推力装置配置为向流体输送预期量的诱导功率,并且进一步提供具有至少一个下游推力装置的推力装置组件,其中该下游推力装置至少部分地设置在上游推力装置的下游流管的至少一部分中,以及其中该下游推力装置配置为在上游推力装置的流管与下游推力装置的流管之间的至少一部分重叠区域上从流体中提取预期量的诱导功率。
[0123]
此类推力装置组件的一个好处是改变了流管内特定点处的流速。例如,在上游和下游推力装置之间的工位处,可以人为地增大流速。在理想情况下,上游推力装置所做的任何功都可以由下游推力装置回收,从而使过程中的能量损失最小。此外,由上游推力装置向流体施加的任何不期望的动量变化都可以被下游推力装置消除。换言之,上游推力装置受到的任何不期望的推力都可以被下游推力装置抵消。因此,一些实施例提供了一种用于改变流动的方法,其中该方法可以比现有技术中采用的方法更有效。
[0124]
有许多采用上述方法的装置的可能实施例。图3示出了一个实施例。该图示出了一种推力装置组件,该推力装置组件包含上游推力装置20和下游推力装置21,上游推力装置20可以分类为螺旋桨,下游推力装置21在这种情况下也可以描述为螺旋桨。在其它实施例
中,推力装置20或21可以是除了所示的开放转子类型之外的其它类型。例如,推力装置可以包含若干开放式旋翼,或者可以包含至少一个导管风扇或一对反向转动的同轴螺旋桨。与图1相似,存在流管边界22,该流管边界22具有远上游工位23、在上游推力装置20处的工位24、在上游推力装置20与下游推力装置21之间的工位25、在下游推力装置21处的工位26和远尾流工位27。在这种情况下,下游推力装置21设置在上游推力装置20的流管22中。
[0125]
在该实例中,推力装置组件需要提供垂直向上指向附图顶部的净推力,如推力矢量43所示。存在从附图的顶部向底部的自由流流动,如箭头45所示。本实例中的实施例的目的在于,与基线配置相比,在给定量的推力下减小推力装置组件的诱导功率。这种情况下,基线配置是单个开放式旋翼,诸如图1所示的开放式旋翼实例,其中在工位4和工位24处的净推力和致动器盘面积是相同的。
[0126]
根据一些实施例,这是通过下面图3所示的ifma配置来实现的。上游推力装置20配置为提供推力,该推力平行于并大于推力装置组件的所需净推力,其中净推力是上游推力装置20的推力加上下游推力装置21的推力。推力装置组件上的净推力需要等于所需推力。因此,下游推力装置21上的推力等于净推力和上游推力装置20的推力的差值。在这种情况下,这导致下游推力装置21上的推力垂直向下指向附图的底部,如推力矢量44所示,指向上游推力装置20上推力的相反方向。换言之,下游推力装置21配置为提取由上游推力装置施加给流体的任何动量,该动量将违反并在这种情况下超过推力装置组件上的所需净推力约束。下游推力装置21还被配置成从流体中提取功率。为了改善与基线相比的诱导功率消耗,提取的诱导能量的足够的一部分或全部需要可逆地回收或直接传输到上游推力装置20。
[0127]
通过将能量可逆地储存在推力装置组件内或者将能量可逆地传递到与该推力装置组件相互作用的另一装置,可以可逆地回收能量。例如,下游推力装置可以驱动发电机g,发电机g可以包含配置为将一部分机械能转换成电能的电动机。一部分电能可以可逆地存储在电池、电容器或其它能量储存设备中。电池可以位于推力装置组件内,或者位于附接至推力装置组件的外部装置(诸如飞行器的其余部分)上。还可以以飞轮的形式来机械地提取和储存能量。
[0128]
能量可以以若干种方式直接传递到上游推力装置20。例如,如果能量是通过发电机g从下游推力装置21提取的,则电能可以经由电导体或电线传递到驱动上游推力装置20的电动机m。可替代地,由下游推力装置提取的功率可以以刚性连接上游推力装置20和下游推力装置21的驱动轴的形式来机械传递。在一些实施例中,机械能传递装置不需要形成刚性连接,而是包含可调节的联动装置、齿轮和其它机构,诸如离合器。
[0129]
本领域中有许多公知的其它方法用于从下游推力装置21回收机械能并储存机械能或将机械能传递到上游推力装置20。
[0130]
上述实施例导致诱导功率小于基线诱导功率。对于工位4和工位24处的给定最大致动器盘面积以及给定净推力,诱导功率随着上游推力装置20的推力增大而减小。应当注意,上游推力装置20的推力需要大于所需净推力,以便与本实例中的基线相比实现诱导功率的减小。
[0131]
一些实施例提供了对如图2所示的导管式推力装置的改进。该导管具有若干优点,例如减小了螺旋桨的尖端损失,这使得导管在与开放式旋翼相同量的推力下以较低诱导功率运行。导管也有若干缺点。它可以增大ta的重量以及润湿面积和相关阻力。导管的有效性
还受到扩散器中流动分离风险的限制。此外,由于复杂性和重量,改变导管的形状以在不同流速下获得效率增益通常是不切实际的。
[0132]
一些实施例受这些缺点中的一些缺点影响较小。对于一些无导管的实施例,推力装置可以经受导管的益处,而在重量和润湿面积上没有等同损失。为了避免流动分离,导管将需要大的扩散器,由于重量和尺寸约束,这可能是不实际的。无导管实施例对于失速约束不太敏感,这将允许一些实施例实现比导管式旋翼更好的性能。推力装置还可以以比导管更低的复杂性来重新配置。例如,可以通过改变螺旋桨叶片的总桨距来重新配置开放式旋翼类型的推力装置,并且可以容易地控制转速。这可以允许推力装置在不同操作条件(诸如悬停或水平巡航)下以较低的复杂性更有效地操作。
[0133]
应当注意,在图3中,上游推力装置20提供特定推力装置组件的所需推力以及由下游推力装置21抵消的附加推力。在一些实施例中,可能希望将抵消彼此对推力装置组件的净推力贡献的推力装置与推力装置组件的其余部分物理分开。
[0134]
图4图示了此类情况。该图示出了一种辅助推力装置组件,该辅助推力装置组件包含上游推力装置28和下游推力装置30,上游推力装置28可以分类为螺旋桨,下游推力装置30在这种情况下也可以描述为螺旋桨。该图还示出了中间推力装置29,该中间推力装置29也是开放式旋翼类型。存在从附图的顶部垂直向下指向底部的自由流流动,如箭头49所示。与图1相似,存在流管边界31,该流管边界31具有远上游工位32、在上游推力装置28处的工位33、在上游推力装置28与中间推力装置29之间的工位34、在中间推力装置29处的工位35,在中间推力装置29与下游推力装置30之间的工位36、在下游推力装置30处的工位37和远尾流工位38。在这种情况下,中间推力装置29和下游推力装置30设置在上游推力装置28的流管31中。
[0135]
在该实例中,中间推力装置29提供与总推力装置组件的所需净推力相等的推力,如推力矢量47所示,其中推力装置组件包含上游推力装置28、中间推力装置29和下游推力装置30。因此,辅助推力装置组件不需要提供净推力。如图3所示,与基准配置相比,本实施例在该实例中的目的是降低给定推力量下整个推力装置组件的诱导功率。在这种情况下,基线配置也是单个开放式旋翼,诸如图1所示的开放式旋翼实例,其中在工位4和工位33处的净推力和致动器盘面积是相同的。
[0136]
根据一些实施例,这是通过下面图4所示的实施例来实现的。上游推力装置28配置为提供推力,该推力平行于并大于总推力装置组件的所需净推力,其中净推力是上游推力装置28的推力加上中间推力装置29的推力再加上下游推力装置30的推力。因此,上游推力装置28的推力指向页面顶部,如推力矢量46所示。在这种情况下,下游推力装置30上的推力与上游装置28的推力相等且相反,如推力矢量48所示。换言之,下游推力装置30配置为提取由上游推力装置施加给流体的任何动量,该动量将违反并在这种情况下超过总推力装置组件上的所需净推力约束。下游推力装置30还配置为以先前关于图3中的下游推力装置21描述的方式从流体中提取功率。
[0137]
应当注意,只要是总目的,上游推力装置和下游推力装置不必在最小感应功率下单独运行,只要总诱导功率最小化(如果这是目标)。例如,如果目标是在工位38处保持远流流管横截面上的恒定气流下洗,则上游推力装置28或中间推力装置29的气流下洗不必是均匀的,只要通过下游推力装置消除任何不均匀性。
[0138]
应当注意,适用于同轴螺旋桨的原理也适用于一些实施例。例如,中间推力装置29的工位35处的致动器盘面积可以与工位33处上游推力装置28的致动器盘面积一样大。因此,中间推力装置的一部分与自由流流动相互作用。中间推力装置可以使用该面积来进一步在总推力装置组件的所需推力的方向上向流体施加动量变化率。这可以允许推力装置组件与基线相比进一步减小诱导功率。同样,也可以增大下游推力装置的致动器盘面积,诸如图4中的30或者图3中的21。与旁路流体流动相互作用的构思在本领域中是公知的。此外,如现有技术中公知的,可以选择流管中螺旋桨的转动方向,使得远尾流中的涡流最小化。
[0139]
在下面段落中将描述其它实施例。
[0140]
为了一般性,单独考虑实施例是有益的。在一个实施例中,装置的目的是在流动中的特定点处相对于自由流流动增大局部流速。这可以通过具有配置为在下游施加动量变化率的上游推力装置的推力装置组件来实现,从而产生下游诱导流速矢量。上游推力装置位于流动中特定点的上游,并且在上游方向上受到推力并对流体做功,从而导致诱导功率消耗。该推力装置组件可以进一步包含下游推力装置,该下游推力装置配置为在上游施加动量变化率,从而产生上游诱导流速矢量。下游装置位于上游推力装置的流管中。下游推力装置位于流动中特定点的下游,并且在下游方向上受到推力并从流体中回收功率。在理想情况下,由上游装置施加给流体的所有诱导功率均由下游装置回收,使得净诱导功率不会损失到流体。在要求推力装置组件的零净推力的理想化情况下,上游推力装置和下游推力装置上的推力进一步抵消。只要上游推力装置组件和下游推力装置组件定位得足够远以允许流动加速,位于上游推力装置与下游推力装置之间的特定点就可以经历局部流速的期望增大。这是由于上游推力装置的诱导流动或气流下洗以及下游推力装置的气流下洗。随后,可以通过下游推力装置在特定点的下游进一步回收该气流下洗,使得在理想情况下,在流管的远尾流中不存在气流下洗。
[0141]
在另一个实施例中,装置的目的是降低流动中特定点处的局部流速。根据一些实施例,与上述实例相比,这可以通过与颠倒上游推力装置和下游推力装置的作用来实现。因此,上游推力装置可以配置为在上游施加动量变化率,从而产生上游诱导流速矢量。类似地,下游推力装置可以配置为在下游施加动量变化率,从而产生下游诱导流速矢量。在理想情况下,由上游装置回收的所有诱导功率被下游装置消耗掉,使得推力装置不会从流体中提取净诱导功率。
[0142]
应当注意,上游推力装置只需要在特定点处满足局部流速要求。与自由流流动相比,包含上游推力装置的致动器盘面积的流管中的不同点可能需要不同的局部流速增大或减小。局部流速要求可以视为对推力装置组件在流管中特定点或点集合处或流管附近的气流下洗的要求。这些要求可以通过改变上游推力装置和下游推力装置的致动器盘面积上的推力分布来满足。考虑到在特定点处的这些流动约束,可能存在附加目标,诸如最小化诱导功率的最小化,这可以转换为对远尾流中的零气流下洗或均匀气流下洗的附加要求。该目标还可以是最小化在该操作条件下消耗的总功率。
[0143]
考虑推力装置组件的操作条件,目的是针对给定的最大致动器盘面积和自由流流速,最大化从流体中提取的功率,假设总是满足结构约束。可以考虑由开放式旋翼(诸如风力涡轮机)组成的基线配置。根据一些实施例,推力装置组件可以包含上游推力装置和下游推力装置。在该实例中,下游推力装置设置在上游推力装置的滑流中。存在非零的自由流流
动。上游推力装置配置为通过在下游方向上对流动施加动量变化率来对自由流流动做功。通过与流体的相互作用,上游推力装置因此受到指向上游的力。下游推力装置配置为从上游推力装置的流管中的流动提取功率。换言之,流体在下游推力装置上做功,并且受到指向上游的动量变化率,使得下游推力装置受到下游方向上的力。因此,与基线开放式旋翼配置相比,可以实现性能改进。例如,风力涡轮机可以包含两个开放式旋翼,其中一个旋翼位于桅杆的上游,而另一个旋翼位于桅杆的下游。旋翼可以如上所述操作。上游旋翼消耗的功率可以由外部电源或下游旋翼提供。如在图3的描述中提及的,例如,经由与轴的直接连接或者经由包含齿轮系和离合器的可调节传动装置,功率可以在上游推力装置与下游推力装置之间机械传递。功率也可以电传递,其中下游旋翼驱动发电机,发电机的电能传输到驱动上游旋翼的电动机。应当注意,其它配置也是可能的,并且原理也适用于水力涡轮机或其它推力装置或操作条件。
[0144]
在一些实施例中或操作条件下,可能希望降低下游旋翼的致动器盘处的局部流速,而不是增大该局部流速。例如,在风力涡轮机的情况下,对于某些操作条件,自由流流速可以超过下游旋翼的允许峰值自由流流速。应当注意,由于上游旋翼和下游旋翼的不同尺寸和标称操作负载,例如由结构限制确定的上游旋翼的峰值自由流流速可以大于下游旋翼的峰值自由流流速。它们在设计上也可以不同。在这种情况下,可以使上游旋翼上的推力反向,从而从流动中提取功率并且将下游旋翼处的流速降低到标称水平。这样,可以防止下游旋翼上的推力超过设计极限。因此,上游推力装置可以用于改变流场,从而优化整个推力装置组件的性能。应当注意,本领域中公知的其它方法也适用于此类情况。在单个开放式旋翼的情况下,可以调节诸如转速和螺旋桨桨距等操作条件。然而,这些方法的有效性受限于自由流速度的范围,并且一些实施例可以扩展这些限制。在上下文中描述的原理也适用于其它操作条件和情况。
[0145]
在下面的段落中以及在图5的上下文中,将对现有技术中使用的一些装置和方法进行论述。
[0146]“边界装置”包含直接向流体元施加力或力矩的流体操纵装置的任何增量表面或体积,反之亦然。边界装置的实例是飞行器机身的润湿表面、或船舶的船体的浸湿表面、机翼的表皮、平板的表面、或汽车的外表面。
[0147]
图5示出了相对于周围流体移动的边界装置61的剖视图。边界装置61具有前缘点64和后缘点65。前缘点和后缘点也可以是边缘,诸如机翼的前缘或后缘。在该特定实施例中,为了简单起见,边界装置是可以描述为薄壳的刚性体,具有封闭的外表面62和内表面63。在该实施例中,边界装置61的形状是旋转形状,即,它关于穿过前缘点64和后缘点65的轴线轴对称。
[0148]
可以如下定义“边界装置框架”或“baf”。原点位于由边界装置61的外表面62包围的体积的几何质心处。x轴与连接前缘点64和后缘点65的直线重合,并且指向前缘点64。除非指定,z轴垂直指向附图的页面。
[0149]
示出了三个速度分布图67
‑
69。速度分布图中的每个箭头指示增量流体元相对于边界装置的速度矢量,其中增量流体元位于箭头的基部。连接速度分布图67中箭头尖端的线描述了连续的速度分布。
[0150]
边界装置61相对于周围流体移动。自由流流速在空间上是均匀的,并且在时间上
是恒定的。在图5中,相对于边界装置61的自由流流体流动被引导平行于baf的x轴且在其相反方向上,即从附图的顶部朝向底部。在边界装置61的远端上游,增量流体元的速度近似等于自由流流速。因此,速度分布图67是均匀的,大小和方向均等于自由流流速。
[0151]
速度分布图68描述了边界装置61附近的速度分布。在该实施例中,在边界装置61的表面上存在无滑移条件。在其它实施例中,沿着外表面62可以有非零滑移速度。由于粘性效应,在baf的y轴方向上产生的速度梯度引起作用在边界装置61上的剪切应力,该剪切应力又引起粘性牵引阻力。粘性牵引阻力平行于baf的x轴,并且指向负x方向。
[0152]
流线66描述了与边界装置61相关联的边界层的近似厚度。由于边界装置61是圆柱形对称的,所以流线66也可以称为流管66。
[0153]
速度分布图69描述了边界装置61的远尾流中的速度分布。速度分布图69中的流管66内速度大小的减小的速度说明了由作用在边界装置61上的粘性牵引阻力引起的远尾流中的动量亏损。
[0154]
根据一些实施例,围绕边界装置的流场由流体流动操纵装置以如下方式来改变:针对至少一种操作条件,组合装置上的粘性阻力低于基线边界装置。
[0155]
基线边界装置不需要具有与组合装置中的边界装置相同的形状。基线边界装置是现有技术中使用的传统装置,诸如图5所示的边界装置61。例如,基线边界装置可以具有传统管状飞行器机身的形状。
[0156]
滑移速度是流体在边界装置表面处并相对于边界装置表面的速度。在粘性流体中,与对于流体无粘性的理论情况计算的滑移速度相比,滑移速度在量值上通常更小。这两个速度之间的差值称为“速度亏损”。由于粘性效应,边界装置表面处的速度亏损在垂直于局部自由流流速的方向上传播通过流体。结果,不可忽略的流体体积受到速度亏损的影响。受这种速度亏损影响的流体流动区域称为边界层。该区域的厚度称为边界层厚度。如果其它条件相同,边界层厚度可以定义为区域,在该区域内,速度亏损大于对于流体无粘性的理论情况计算的速度大小的1%。速度亏损转化为动量亏损,动量亏损引起作用在边界装置上的粘性剪切应力和粘性阻力。
[0157]
根据一些实施例,与数学上消除了流体流动操纵装置对流体流动的影响的情况相比,对于组合装置的润湿面积的至少一部分,局部自由流流速减小。该流体流动操纵装置以如下方式配置:由于该流体流动操纵装置与基线边界装置相比的附加润湿面积引起的组合装置的功率消耗的增大在量值上小于由于与该基线边界装置相比作用在边界装置上的牵引阻力引起的边界装置消耗的功率的减小。边界装置消耗的功率降低的一部分可以由边界装置的局部自由流流速的降低引起。可替代地或同时地,流体操纵装置可以配置成在边界装置的边界层的至少一部分中有利于层流而不是湍流。所消耗功耗的降低的另一部分可以由边界装置与基线边界装置相比的形状变化引起。流体流动操纵装置可以以如下方式来操纵流动:边界装置的润湿面积可以减小,而不会由于一部分流动的分离而导致压力阻力增大。对于待由边界装置包围的给定体积,具有最小润湿面积的边界装置的形状是球体。然而,由于球体下游的失速流动,球体会引起较大的压力阻力。即使没有失速,球体也会由于润湿面积上较大的均方局部自由流流速以及边界层效应而引起较大的粘性阻力。除了诸如易于制造等其它原因之外,由于这些原因,大多数机身具有类似于管或泪珠的细长形状。流体操纵装置可以改变流动,使得边界装置的润湿面积可以减小,同时与基线边界装置相比
也减小了均方局部自由流流速。
[0158]
流场改变可以采取几种形式,并且每种形式的改变均可以通过流体操纵装置的几个不同实施例来执行。
[0159]
图7描绘了一种ifma配置,该ifma配置包括相对于周围流体移动的边界装置95。边界装置95具有前缘点98和后缘点99。前缘点和后缘点也可以是边缘,诸如机翼或翼型的前缘或后缘。在机翼的情况下,前缘和后缘可以视为特定流动条件下的前停滞线和后停滞线。在该实施例中,边界装置是可以描述为薄壳的刚性体,具有封闭的外表面96和内表面97。在该实施例中,边界装置95的形状是旋转的形状,即其围绕穿过前缘点98和后缘点99的轴轴向对称。
[0160]
边界装置95可以是船舶的船体或飞行器的机身。在其它实施例中,边界装置95可以具有不同的几何形状。例如,边界装置的形状可以与图5所示的边界装置61的形状相似。对于任何给定的应用,都可以找到合适的几何形状。可以使用各种现有方法和材料来制造边界装置。
[0161]
可以如下定义“边界装置框架”或“baf”。原点位于由边界装置95的外表面96包围的体积的几何质心处。x轴与连接前缘点98和后缘点99的直线重合,并且指向前缘点98。除非指定,z轴垂直指向附图的页面。
[0162]
示出了三个速度分布图101
‑
103。速度分布图中的每个箭头指示增量流体元相对于边界装置的速度矢量,其中增量流体元在相对于边界装置测量速度的时间点处位于箭头的基部。连接速度分布图中箭头尖端的线描述了连续的速度分布。
[0163]
边界装置95相对于周围流体移动。在图示的简化情况下,自由流流速在空间上是均匀的并且在时间上是恒定的。在图7中,相对于边界装置95的自由流流体流动被引导平行于baf的x轴且在其相反方向上,即从附图的顶部朝向底部。在边界装置95的远端上游,增量流体元的速度近似等于自由流流速。因此,速度分布图101中的速度在空间上是均匀的并且在时间上是恒定的,大小和方向均等于相对于边界装置的自由流流速。
[0164]
速度分布图102描述了边界装置95附近的速度分布。在该实施例中,在边界装置95的外表面96上存在无滑移条件。在其它实施例中,沿着外表面96可以有非零滑移速度。
[0165]
流线100描述了流管的边界,当沿着x方向观察时,该流管具有圆形横截面。图7中的虚线示意性地表示自由流流动与流经上游imsa 104的旋翼桨盘的流动之间的近似边界100。位于边界上的线可以描述为流线,并且由边界包围的体积可以描述为流管。应当注意,图7所示的边界仅是特定操作条件的实例。对于所描绘的imsa的其它操作条件或操作模式,边界的形状可以是大不相同的。
[0166]
速度分布图103描述了边界装置95的远尾流中的速度分布。在简化的理想情况下,速度分布图103基本上等于速度分布图101,如图7所示。在其它实施例中,情况不必如此。
[0167]
根据一些实施例,边界装置(诸如边界装置95)设置有意向性流体操纵装置。在图7所示的ifma配置中,该意向性流体操纵装置可以描述为imsa组件,该imsa组件包含上游imsa 104和下游imsa 110,上游imsa 104可以分类为螺旋桨,下游imsa 110在这种情况下也可以描述为螺旋桨。在这种情况下,下游imsa 110设置在上游imsa 104的流管100中。在其它实施例中,情况不必如此。例如,在其它实施例中,下游imsa 110可以延伸到上游imsa 104的流管100之外。此类配置在下游imsa 110也用于对imsa组件的净推力做出积极贡献的
情况下是有用的。
[0168]
螺旋桨(诸如螺旋桨104或上游imsa 104)的剖面图示出了第一螺旋桨叶片105和第二螺旋桨叶片106。第一螺旋桨叶片105的前缘109和第二螺旋桨叶片106的后缘108也是可见的。在含有螺旋桨的所有附图中,示出了相似的配置。螺旋桨叶片在结构上由旋翼毂107支撑。
[0169]
下游imsa 110以与上游imsa 104相似的方式配置,因此将不再详细描述。上游imsa104和下游imsa 110经由连接装置刚性地连接到边界装置95。为了清楚起见,在图7中未示出该装置。
[0170]
在其它实施例中,imsa 104或110的类型可以是不同于所描绘的开放式旋翼类型。例如,imsa可以包括若干开放式旋翼,或者可以包含至少一个导管风扇或一对反向转动的同轴螺旋桨。imsa也可以是回旋陀螺仪或不同类型的imsa。
[0171]
根据一些实施例,在边界装置附近的流场通过流体操纵装置以如下方式来意向性改变:在垂直于边界装置表面的方向上,流速的平均空间梯度人为地且意向性地减小。剪切应力与牛顿流体的流速梯度成比例。因此,与现有技术的实施例相比,作用在边界装置上的粘性剪切应力更低。在一些实施例中,与现有技术的代表性边界装置相比,边界装置消耗的粘性功率降低大于意向性流体操纵装置的粘性功率消耗增加。因此,对于一定范围的操作条件,通过一些实施例可以实现粘性功耗的净降低。意向性流体操纵装置以及边界装置的最佳配置取决于应用和约束条件,并且可以使用多种方法来发现。例如,许多此类方法在计算流体力学中是公知的。
[0172]
在图7所示的实施例中,上述流体操纵装置由上游imsa 104和下游imsa 110组成。该流体操纵装置表示为“imsa组件”。imsa组件通过人为且意向性地改变边界装置95表面附近的流动速度的空间分布来减小在边界装置95表面处和在垂直于边界装置95表面的方向上的流动速度的平均空间梯度。
[0173]
在一些实施例中,该改变包含在完全滑移情况下减小边界装置95的外表面96处的流动速度大小。“完全滑移情况”是特定表面不存在边界层效应或无滑移条件的理论情况。在该理论情况下,对于特定表面,已经从数学上去除了外表面96对流体流动的边界层效应或粘性阻力效应。相对于局部自由流流体流动,即在没有imsa组件的情况下围绕边界装置95的流动,发生上述速度的降低,在这种情况下,也计算了全滑移情形。假设imsa组件对流体流动没有影响的情况称为“参考情况”。应当注意,参考情况的性质由与之比较的情况来决定。例如,应当从上下文中明确,特定参考情况是否应当考虑具有完全滑移或无滑移条件。速度降低是上游imsa 104和下游imsa 110在边界装置95表面处的组合诱导速度指向baf的正x方向的结果。与参考情况相比,在完全滑移情况下边界装置95的外表面96处的流速大小的这种减小可以减小外表面96处的雷诺数。在无滑移情况下,雷诺数的减小可以增大边界层的厚度并且减小在外表面96处垂直于外表面96的方向上的流速的平均空间梯度。因此,可以减小外表面96的平均粘性剪切应力和粘性阻力损失。
[0174]
在一些实施例中,在外表面96处的速度尽管在量值上减小了,但是在外表面96处的完全滑移情况下仍然可以在负x方向上具有非零分量。换言之,与上述具有完全滑移条件的参考情况相比,在完全滑移情况下外表面96处的流体元的速度的总体方向可以基本上不变。
[0175]
在所描绘的实例中,在边界装置95的外表面96处的流体流动的大小已经人为地减小到在完全滑移情况下基本为零的程度。当在完全滑移情况下给定表面处的流体流速的大小为零时,如果其它条件相同,无滑移情况将等于完全滑移情况。在这种情况下,外表面96上的粘性阻力将为零。在此类理想化的简化情况下,流管100可以视为边界装置95的人工边界层。应当注意,当还考虑imsa组件的粘性阻力效应时,此类配置可能不是最佳的,即最小化总粘性阻力。
[0176]
如速度分布图102所示,在所示位置处,在垂直于外表面96的方向上的流体流速大小的梯度也基本为零。对于一些实施例,该梯度可以在平均值上大于零,其中平均值是在整个外表面96上计算的。然而,与具有无滑移条件的参考情况相比,该平均梯度可以更小。
[0177]
在其它实施例中,在边界装置95附近的流管100内的流体流动可以有不同的空间变化或空间分布。例如,可以存在流动的再循环。换言之,对于全部或部分外表面96,邻近边界装置95的外表面96的流体流速在完全滑移情况下在正x方向上可以具有非零分量。在这种情况下,滞留的涡流环(即循环流的环)将包围边界装置95的全部或一部分。由于对称性,该涡流环将具有与baf的x方向对准并重合的中心轴,并且将位于平行于baf的yz平面的平面内。此类涡流环将由msa组件保持在适当位置,并且由周围的流动重新激励。
[0178]
在一些实施例中,在边界装置95附近的流管100内的流速的空间分布也经过有意改变。在图7所示的实施例中,诱导速度的空间分布配置为产生流管100内流体流速大小的基本线性变化。如图所示,流管100内的流体流速大小在正y方向上基本上线性增大。在其它实施例中,流管100内的流速大小在正y方向上以递增速率增大。此类配置可以有助于人为地保持外表面96的边界层的低雷诺数,即使边界层厚度在流向方向(即baf的负x方向)上增长。速度大小的逐渐梯度还可以最小化流管100内的摩擦加热和湍流效应,从而减小阻力损失或减小与边界装置95相关联的净功耗。在将流管100视为边界装置95的人工边界层的模拟中,速度大小的逐渐梯度可能是期望的,以确保人工边界层基本上是层流并保持层流。此外,流管100内的速度大小的逐渐增大将确保存在从周围流动至流管100的最小动量传递,这将导致远尾流中(即在速度分布图103中)流管100周围的流动中的动量亏损,并且有助于与边界装置95相关联的粘性功耗。
[0179]
可以使用现有方法找到流管100内流体流速大小的最佳空间变化,并且不必是线性的。例如,除了其它标准之外,可能希望降低上游imsa 104释放到流体中的总涡度的速率。
[0180]
在完全滑移情况下外表面96处的流体流动的最佳大小与方向、以及外表面96处的流速梯度的大小和标志可以使用现有方法针对给定流动条件或给定应用来优化。也可以使用相同的方法来优化流管100内流体流速的最佳分布。此类优化的目的可以是最小化边界装置和imsa组件的总功耗。
[0181]
在边界装置95附近的上述速度分布通过速度分布图102提供的快照来举例说明。该速度分布与针对完全滑移或无滑移条件的参考情况下的速度分布大不相同。根据一些实施例,这种差异通过意向性流体操纵装置来提供。在图7所示的实施例中,该流体操纵装置由imsa组件实现。imsa组件通过对流体施加特定的空间诱导流动分布来操纵流体。该诱导流动可以视为在完全滑移条件下叠加在参考情况下的流体流动上。换言之,可以通过计算为了将流动从参考情况改变为期望流速分布所需的诱导流动分布并且以实现期望诱导流
动分布的方式配置imsa组件,来生成期望流速分布。与外表面96相关联的粘性阻力范围,即边界层和无滑移条件的影响范围,由该叠加流动决定或定义,即诱导流动和参考情形中的流动的叠加。这种粘性效应又可以视为叠加在上述叠加流动上。如下面的段落中描述的,有几种方式可以描述imsa组件的上述诱导速度分布的产生或生成。
[0182]
在边界装置95附近的诱导速度分布可以视为是由流体元因为与上游imsa 104的相互作用而受到的动量变化率产生的。在一些实施例中,一些流体元在与上游imsa 104的相互作用过程中受到负的平均动量变化率。在所述流体元已经与上游imsa 104相互作用之后,该动量变化率可以导致边界装置95的外表面96附近的流体元的动量的净减小。相对于全滑移条件下的参考情形,即,相对于imsa组件不与流体相互作用的情况,这种减小会发生。换言之,在一些实施例中,上游imsa 104配置为在上述隔离情况下减小上游imsa 104的远尾流中的至少一部分流体流动的平均动量。
[0183]
在一些实施例中,远尾流中的流体流动的平均动量的减小至少针对与边界装置95的外表面96相互作用的流线或对于在外表面96附近通过的流线而发生。与隔离情况下的自由流流体流动相比,流体流动的动量的这种减小导致远尾流诱导速度,该远尾流诱导速度在上游方向上具有非零分量,如在隔离情况下自由流流动所限定的。由于边界装置95的外表面96位于上游imsa 104的下游,在边界装置95的外表面96处或在边界装置95的外表面96附近的流动也受到上游诱导速度。如上所述,在边界装置95的外表面96处或在边界装置95的外表面96附近的上游诱导速度的大小和空间分布可以配置成与完全滑移参考情况相比减小完全滑移情况下的自由流流动的大小,并且因此减小边界装置95的平均阻力或者与边界装置95和流体的相互作用相关联的平均功耗。
[0184]
在升力线理论的简化框架中,上述诱导速度分布还可以通过由上游imsa 104的螺旋桨叶片释放到尾流中的自由涡流来产生。这类似于直升飞机旋翼、传统螺旋桨叶片或风力涡轮机叶片的涡流释放。应当注意,在一些实施例中,由下游imsa 110释放的涡流也有助于边界装置95附近(诸如在速度分布图102的位置处)的诱导速度。
[0185]
上述诱导速度分布还可以通过沿着上游imsa 104的螺旋桨叶片的适当升力或推力分布来产生。由于上游imsa 104的诱导速度对于上游imsa 104的至少一部分指向上游方向(即baf的正x方向),所以上游imsa 104的操作类似于风力涡轮机的操作。换言之,对应于上游imsa 104的尾流中的诱导速度分布,上游imsa 104的叶片的至少一部分(例如第一螺旋桨叶片105)受到的推力在baf的负x方向上具有非零分量,如推力矢量127所示。
[0186]
上游imsa 104的至少一部分配置为从流体中提取有用功率。该功率可以以多种方式来提取。例如,发电机可以刚性地连接到驱动轴,该驱动轴刚性地连接到上游imsa 104的螺旋桨叶片。在图7所示的实施例中,驱动轴可以平行于上游imsa 104的螺旋桨叶片的转动轴,并且平行于baf的x轴。在一些实施例中,当上游imsa 104配置为传统螺旋桨时,上述驱动轴视为旋翼毂、或常规螺旋桨的螺旋桨轴。由于电动机直接连接到驱动轴,驱动轴直接连接到螺旋桨叶片,所以该配置也可以描述为直接驱动配置。
[0187]
在一些实施例中,在发电机与驱动轴之间还可以存在传动装置或齿轮系。在一些实施例中,在螺旋桨与传动装置之间还可以存在离合器。在一些实施例中,可以重新配置传动装置。换言之,可以改变齿轮比,或者可以改变齿轮。在一些实施例中,还可以存在附接到驱动轴的机械盘式制动器,其中该制动器配置为能够阻止或防止驱动轴转动。由发电机因
为驱动轴的转动而产生的电力可以储存在电能储存装置中。例如,此类电能储存装置可以是电池或电容器。电能储存装置还可以包含机械元件。例如,电能储存装置可以包含电动机或发电机,该电动机或发电机又配置为加速或减速飞轮的转动速率,该飞轮以转动动能的形式机械地储存能量。电动发电机还可以为泵提供动力,该泵配置为压缩和或膨胀罐内的气体,诸如空气。应当注意,电能储存装置中储存的至少一部分能量能够在稍后的时间点提取。有许多此类能量储存装置或机构可用。
[0188]
电力也可以直接传递到第二致动器,其中,例如,传递可以经由电导体进行。在一些实施例中,第二致动器可以瞬间消耗功率。第二致动器可以是与边界装置95相关联的装置或装置组件的任何致动器。例如,第二致动器可以用于致动下游imsa 110。因此,由上游imsa 104从流体中提取的一部分功率可以传递到下游imsa 110,其中将功率重新插入到流体中。在一些实施例中,第二致动器还可以用于为图7中未示出的独立装置或机构提供动力。
[0189]
由上游imsa 104提供的电力也可以分解,并且用于驱动第二致动器、第三致动器并增大例如包含在能量储存装置内的能量。在一些实施例中,由上游imsa 104从流体中提取并施加到刚性连接到上游imsa 104的螺旋桨叶片的驱动轴的功率机械地传递到下游imsa110。可以以几种方式来促进这种传递。例如,刚性附接到上游imsa 104的螺旋桨叶片的驱动轴(该驱动轴表示为“上游驱动轴”)也可以刚性连接到刚性连接到下游imsa 110的螺旋桨叶片的驱动轴(该驱动轴表示为“下游驱动轴”)。换言之,上游驱动轴可以与下游驱动轴相同。在此类配置中,上游imsa 104和下游imsa 110的上游旋翼和下游旋翼分别在相同方向上转动。在其它实施例中,上游驱动轴可以经由传动装置、齿轮系或一系列齿轮以及次级或辅助驱动轴将功率传递到下游驱动轴。在一些实施例中,在上游驱动轴与下游驱动轴之间沿着负载路径还可以有离合器。在一些实施例中,可以重新配置上游驱动轴与下游驱动轴之间的机械连接的齿轮比或传动比。换言之,可以改变齿轮比,或者可以改变齿轮。
[0190]
在一些实施例中,上游imsa 104和下游imsa 110的上游旋翼和下游旋翼分别在相反方向上转动。此类配置可以减小与imsa组件相关联的任何功率损失。这可能是下游imsa 110消除上游imsa 104施加在流动上的任何漩涡的结果。
[0191]
在一些实施例中,上游imsa 104或下游imsa 110的螺旋桨叶片相对于流体的迎角可以通过旋翼毂(诸如旋翼毂107)处的桨距控制机构来控制。该桨距控制机构和相关联的桨距自由度或“dof”可以包含电动机和盘式制动器。作为盘式制动器的替代或与盘式制动器并行,一些实施例还可以包含机械锁,其中该机械锁可以配置为在相对于旋翼毂的给定桨距角下锁定螺旋桨叶片的桨距dof。桨距控制机构还可以包含液压系统和机械联动装置,诸如在传统直升飞机或螺旋桨的共同桨距机构中发现的液压系统和机械联动装置。上游imsa 104或下游imsa 110的螺旋桨叶片的桨距控制机构和螺桨距dof也可以配置为允许螺旋桨叶片顺桨。可以对桨距角以及螺旋桨叶片的转动速率进行控制,从而可以调节imsa组件对流体的影响。这又将允许针对不同的流动条件(诸如不同的自由流流速)对imsa组件的性能进行优化。
[0192]
在图7所示的ifma配置中,下游imsa 110配置为平衡、消除或抵消上游imsa 104和边界装置95对流体的影响。以这种方式,远尾流中的流体流速分布(如速度分布图103所示)基本上等于自由流流体流速分布(如速度分布图101所示)。在标称巡航期间,下游imsa 110
在该过程中消耗的功率通常大于上游imsa 104提取的功率。
[0193]
下游imsa 110被配置成在流体上施加正的动量变化率,即沿负x方向加速流体。结果,在隔离情况下,imsa 110在imsa 110的远尾流中的诱导速度指向baf的负x方向。下游imsa 110在远尾流中的诱导速度可以视为抵消上游imsa 104在远尾流中的诱导速度。
[0194]
在升力线理论的简化框架中,下游imsa 110的远尾流中的期望诱导速度分布也可以视为是由自由涡流产生的,该自由涡流由下游imsa 110的螺旋桨叶片释放到尾流中。这类似于直升机旋翼、传统螺旋桨叶片的涡流释放。
[0195]
在隔离情况下,下游imsa 110的上述诱导速度分布也可以视为是由沿着下游imsa 110的螺旋桨叶片的合适升力或推力分布产生的。由于在隔离情况下的下游imsa 110的诱导速度对于的下游imsa 110的至少一部分指向下游方向(即baf的负x方向),所以下游imsa 110的操作类似于传统固定翼飞行器的传统螺旋桨的操作。换言之,对应于隔离情况下下游imsa110的尾流中的诱导速度分布,下游imsa 110的叶片的至少一部分受到的推力在baf的正x方向上具有非零分量,如推力矢量128所示。
[0196]
应当注意,在一些实施例中,不存在指定的下游imsa,例如图7中的下游imsa 110。在此类实施例中,由上游imsa提取的功率可以储存或用于经由替代的流体操纵装置或方法提供推力。应当注意,图7中的上游imsa 104在baf的负x方向上施加力。在巡航飞行期间,这个力将至少需要被适当推力抵消,以便维持baf的恒定巡航速度。该推力可以以多种方式来提供。在图7中,该推力由下游imsa 110提供。在其它实施例中,该推力可以由不同的推力装置提供。
[0197]
在一些实施例中,该推力可以通过增大上游imsa的螺旋桨叶片的半径来提供。在此类实施例中,上游imsa的螺旋桨叶片的长度大于图7所示的流管100的半径。在这种情况下,上游imsa 104的螺旋桨叶片可以具有两个不同的部分。第一部分可以是螺旋桨叶片的位于第一内部流管中的部分,该第一内部流管可以具有与图7所示的流管100相似的尺寸和配置并且实现与图7所示的流管100相似的目的。上游imsa的螺旋桨叶片的第一部分可以配置为实现与图7所示的整个上游imsa 104相似的目的。此类上游imsa的螺旋桨叶片的剩余第二部分可以配置为产生上述的所需推力。第二部分的尾流形成外部流管,该外部流管包围或包裹内部流管。上游imsa的推力产生段的诱导速度在远尾流的整个外部流管中可以是均匀的,以便使诱导功耗最小化。因此,由螺旋桨叶片的第一部分提取的功率经由螺旋桨叶片的第一部分与第二部分之间的刚性结构连接直接机械地传递到螺旋桨叶片的第二部分。内部流管内流体的一部分能量损失用于产生推力并且增大外部流管内流体的能量。应当注意,此类配置将在内部流管内的尾流中产生动量亏损,因为如上所述,在这类实施例中不存在指定的下游imsa。此类配置将导致远尾流中的不均匀速度分布,因此会比整个远尾流中(即在内部流管和外部流管两者上)的速度分布基本上均匀的配置效率更低。然而,由于回收了归因于粘性阻力的一部分能量损失,此类配置仍然可以提供对现有技术的实施例的改进。
[0198]
在其它实施例中,通过在上述配置增设下游imsa来消除内部流管中的上述动量亏损。
[0199]
在其它实施例中,下游imsa可以延伸到流管100之外。例如,下游imsa的螺旋桨叶片的长度可以大于流管100的半径。以这种方式,可以减小产生推力的下游imsa的诱导功
耗。在这种配置中,可以在下游imsa的内部流管和外部流管上实现均匀的远尾流诱导速度分布,这对于最小化诱导功率是期望的。
[0200]
在其它实施例中,与图7所示的实施例相比,上游imsa和下游imsa都可以包含旋翼尖端延伸部。在一些此类实施例中,上游imsa和下游imsa的旋翼直径基本上相同。在其它此类实施例中,情况不必如此。如前所述,旋翼尖端延伸部产生包围内部流管的外部流管。上游imsa和下游imsa的旋翼的内部可以以与图7和流管100的上下文中描述的方式相同的方式来配置。旋翼的外部可以配置为在最小化总功耗的同时产生期望量的推力,该总功耗包含型阻和诱导阻力。例如,上游imsa和下游imsa的外部(即与外部流管相关联的部分)可以以与反向转动的同轴旋翼相似的方式来配置,上游imsa和下游imsa都在baf的正x方向上产生推力。在另一个实例中,上游imsa的外部可以配置为产生推力,该推力指向baf的正x方向,并且该推力的大小大于上游imsa和下游imsa的外部所需的期望推力。因此,下游imsa的外部可以配置为产生指向baf的负x方向的推力。与上游imsa和下游imsa两者的推力矢量指向baf的正x方向的配置相比,此类配置可以减小与上游imsa和下游imsa的外部相关联的诱导功耗。
[0201]
在一些实施例中,可以有不止一个单个上游螺旋桨(诸如上游imsa 104)以及不止一个的单个下游螺旋桨(诸如下游imsa 110)。可以有若干螺旋桨位于边界装置95附近的流管100内。为了维持流管100内的期望速度分布,在流管100内使用若干螺旋桨可能是期望的。例如,考虑具有锥形端部的圆柱形边界装置,诸如传统商业运输机的机身。在这种情况下,沿机身长度设置若干旋翼或螺旋桨是方便且期望的。例如,螺旋桨可以位于沿着baf的x轴如图6所示定位有导管(诸如第三imca 81)的相同位置处。螺旋桨可以以机身直径不变的方式安装在机身上,即机身位于螺旋桨毂内或穿过螺旋桨毂的中心。机身的圆形形状有利于旋翼围绕机身转动。旋翼毂可以形成能够围绕机身转动的刚性环。如图7所示,在这种情况下,转动轴线平行于圆柱形机身的纵向轴线。若干螺旋桨叶片可以附接到旋翼毂,并且执行期望的流体流动操纵。电动机可以给旋翼毂提供动力,并且从旋翼毂相对于机身的转动中提取动力,这取决于旋翼是处于“上游”还是“下游”位置或配置。在此类配置中,至少在理论上,机身可以是无限长的,并且在标称恒定速度巡航期间,流管100内的流场在平均值上保持恒定,其中平均值是在沿机身长度均匀间隔的螺旋桨之间的一个间隔距离上沿着baf的x轴计算的。
[0202]
每个旋翼叶片的长度可以是机身直径的一小部分。在无滑移参考情况下,旋翼叶片的长度可以大约是在流动中该特定位置处的边界层的厚度。在一些实施例中,在无滑移参考情况下,旋翼叶片的长度与沿着边界装置(诸如机身)外表面的边界层的最大厚度的比值小于2。在一些实施例中,该比值小于5。在一些实施例中,该比值小于10。在一些实施例中,该比值小于100。
[0203]
图6示出了另一种ifma配置的剖视图。图6所示的装置的一些特征以及该装置的一些操作原理与图7所示的装置具有相似性,因此在图6的上下文中将不再详细描述,反之亦然。
[0204]
图6描绘了相对于周围流体移动的边界装置70。边界装置70具有前缘点73和后缘点74。前缘点和后缘点也可以是边缘,诸如机翼或翼型的前缘或后缘。在机翼的情况下,前缘和后缘可以视为特定流动条件下的前停滞线和后停滞线。在该实施例中,边界装置是可
以描述为薄壳的刚性体,具有封闭的外表面71和内表面72。在该实施例中,边界装置70的形状是旋转的形状,即其围绕穿过前缘点73和后缘点74的轴轴向对称。
[0205]
边界装置70可以是船舶的船体或飞行器的机身。在其它实施例中,边界装置70可以具有不同的几何形状。例如,边界装置的形状可以与图5所示的边界装置61的形状相似。对于任何给定的应用,都可以找到合适的几何形状。可以使用各种现有方法和材料来制造边界装置。
[0206]
可以如下定义“边界装置框架”或“baf”。原点位于由边界装置70的外表面71包围的体积的几何质心处。x轴与连接前缘点73和后缘点74的直线重合,并且指向前缘点73。除非指定,z轴垂直指向附图的页面。
[0207]
示出了三个速度分布图76
‑
78。速度分布图中的每个箭头指示增量流体元相对于边界装置的速度矢量,其中增量流体元在相对于边界装置测量速度的时间点处位于箭头的基部。连接速度分布图中箭头尖端的线描述了连续的速度分布。
[0208]
边界装置70相对于周围流体移动。在图示的简化情况下,自由流流速在空间上是均匀的并且在时间上是恒定的。在图6中,相对于边界装置70的自由流流体流动被引导平行于baf的x轴且在其相反方向上,即从附图的顶部朝向底部。在边界装置70的远端上游,增量流体元的速度近似等于自由流流速。因此,速度分布图76中的速度在空间上是均匀的并且在时间上是恒定的,大小和方向等于相对于边界装置的自由流流速。
[0209]
速度分布图77描述了边界装置70附近的速度分布。在该实施例中,在边界装置70的外表面71上存在无滑移条件。在其它实施例中,沿着外表面71可以有非零滑移速度。速度分布图77与图7所示的速度分布图102相似。因此,在图6的上下文中将不再详细描述该速度分布图的特征及其替代实施例。
[0210]
速度分布图78描述了边界装置70的远尾流中的速度分布。在简化的理想情况下,速度分布图78基本上等于速度分布图76,如图6所示。应当注意,存在由于与imca组件相关联的阻力而引起的动量亏损,例如,这可以由压力阻力或粘性阻力引起。在其它实施例中,也可能存在由于与边界装置70相关联的阻力而引起的动量亏损。
[0211]
根据一些实施例,边界装置(诸如边界装置70)设置有意向性流体操纵装置。在图6所示的实施例中,该意向性流体操纵装置可以描述为imca组件,该imca组件包含第一imca79、第二imca 80、第三imca 81和第四imca 82。在该实施例中示出了四个imca,然而可以使用更多或更少的imca。
[0212]
每个imca(诸如第一imca 79)可以描述为圆形导管。在图6所示的实施例中,每个导管配置为产生在径向向外方向上具有分量的升力。每个圆形导管的中心轴线与baf的x轴重合并且指向baf的x轴的方向。粗略地说,导管对流体流动的影响可以视为是由升力线理论中的涡流环产生的。在该简化模型中,每个imca的每个涡流环均位于平行于yz平面的平面内。当沿着正x方向观察时,每个涡流环的循环在顺时针方向上围绕每个环。每个imca具有前缘(诸如第一imca 79的前缘83)和后缘(诸如第三imca 81的后缘89)。
[0213]
流线75描述了流管的边界,当沿着x方向观察时,该流管具有圆形横截面。图6中的虚线流线75示意性地指示了第一imca 79的停滞流线的近似位置,即入射到第一imca 79的前缘停滞线上的流线。由所有此类流线包围的体积可以描述为流管。
[0214]
应当注意,图6所示的流管75仅仅是imca组件的特定操作条件和特定配置的实例。
对于其它操作条件,诸如不同的自由流速度大小,流管75的形状可以不同。例如,流管75可以在第二imca 80的内部区域内通过,而不是也入射到第二imca 80的前缘停滞线上。为了避免流动分离和相关联的压力阻力增大,可能希望imca不位于上游imca的尾流之内,即沿上游imca的停滞流线或在其附近。然而,这可以增大与imca组件相关联的粘性表皮摩擦阻力损失。
[0215]
imca组件中的每个imca均经由连接装置刚性地连接到边界装置70。为了清楚起见,在图6中未示出该装置。
[0216]
在其它实施方案中,imca(诸如imca 79)可以包含若干导管。在此类配置中,imca可以描述为多元件翼型,而不是图6所示的单元件翼型。例如,imca可以包含四元件翼型,每个部分有效地形成单独的导管。此类配置可以增大imca的最大升力系数。
[0217]
imca组件对流体流动的影响是在imca组件附近产生局部诱导速度分布。通常,imca组件内的诱导速度,即imca组件中心轴附近的诱导速度,在baf的正x方向上具有非零分量。通过将imca(诸如第一imca 79和第二imca 80)设置在流体流动内的合适位置处,并且通过选择适当的循环强度或适当的每单位圆周升力,可以实现期望的诱导速度分布。
[0218]
根据一些实施例,imca组件以如下方式配置:与完全滑移参考情况相比,减小在完全滑移情形下边界装置70的外表面71处的流速大小。这种减小可以导致在无滑移情况下在外表面71处的较低表皮摩擦阻力。例如,这种减小可以由外表面71处的有效自由流流动的减小、外表面71上层流的建立或维持或者外表面71处的流动的雷诺数减小引起。对于一些操作条件,与边界装置71相关联的阻力的这种减小可以大于imca组件的增加阻力。
[0219]
图8是ifma配置150的剖视图。ifma配置150的质心以惯性系中的速度移动,其中该速度在空间和时间上的大小和方向上是恒定的。该速度与x轴对准,即指向正x方向。
[0220]
存在上游imsa 151,该上游imsa 151在该实施例中可以描述为螺旋桨。上游imsa 151的剖视图示出了第一螺旋桨叶片152和第二螺旋桨叶片154。第一螺旋桨叶片152的后缘153和第二螺旋桨叶片154的前缘155也是可见的。螺旋桨叶片在结构上由旋翼毂156支撑。imsa151的推力由推力矢量183表示。在工位179处,在该实施例中,通过上游imsa 151向流体施加正的动量变化率。
[0221]
存在下游imsa 166,该下游imsa 166在该实施例中可以描述为螺旋桨。下游imsa 166的剖视图示出了第一螺旋桨叶片167和第二螺旋桨叶片169。第一螺旋桨叶片167的后缘168和第二螺旋桨叶片169的前缘170也是可见的。螺旋桨叶片在结构上由旋翼毂171支撑。imsa166的推力由推力矢量184表示。在工位181处,通过下游imsa 166向流体施加负的动量变化率。在ifma配置150的下游,流管176内的流动相对于ifma配置150的方向由箭头185指示。
[0222]
还示出了中间imsa 161。在该实施例中,中间imsa 161可以描述为机翼。为简单起见,机翼161是直翼。例如,机翼可以刚性地附接到机身。为了清楚起见,未示出机身。中间imsa161可以以与传统固定翼飞行器的固定翼相似的方式来配置。中间imsa 161产生指向正y方向和负x方向的升力。应当注意,为了说明目的,放大了流管176内流动的方向的相关偏转。
[0223]
中间imsa 161包含外表面162、后缘165和基体材料164。基体材料164可以包含诸如铝或钢等金属、或者诸如玻璃纤维或碳纤维等复合材料。上游imsa 151通过具有外表面
206的形状可以是椭圆形或圆形。在其它实施例中,imca可以描述镜像的钟形状,其中镜像平面与机翼的翼展重合。
[0234]
imca 206可以配置为在升力线理论的框架中不释放任何涡度。换言之,与imca 206相关联的循环沿着imca 206的翼展长度是恒定的。在其它实施例中,imca 206还可以释放涡流。例如,imca206可以配置为有助于ifma配置200的净升力。在此类实施例中,imca 206可以视为传统的闭式机翼或环形机翼,恒定的翼展循环添加到imca的释放到imca的远尾流中的边界涡度。换言之,imca可以视为imca和imsa的叠加。在一些实施例中,中间imsa 201也可以描述为闭式机翼。
[0235]
imca 206沿着imca 206的跨度的变化扭转角是imsa 201对流场的影响以及对imca206的边界涡度或循环的要求的结果。
[0236]
在一些实施例中,ifma配置200可以包括以与imca 206相似的方式配置的若干独立闭式机翼。这些独立imca可以以与多元件翼型相似的方式在流向方向上偏离。各个独立imca也可以在垂直于局部流向方向的方向上偏离。imca也可以视为位于另一个imca内。例如,第一圆形imca可以视为与第二圆形imca同心布置。
[0237]
流线222图示了由于通过imca206加速了流动,在工位224处由imca 206包围的流管的横截面积减小。该流管的横截面积在工位225处较大,这对应于imsa 201的较大有效跨度。
[0238]
图14是ifma配置240的剖视图,ifma配置240以与图10所示ifma200相似的方式来配置。在该实施例中,导管241将涡流释放到尾流中。因此,导管241也称为imsa 241。imsa 241可以视为imca和imsa的叠加。imsa 241配置为增大中间imsa 247的局部自由流速度。
[0239]
在该实施例中,imsa 241基本上是轴向对称的。imsa 241包含外表面242、内表面243、基体材料246和后缘244。基体材料246可以以与基体材料164相似的方式来配置。中间imsa247以与中间imsa 201相似的方式来配置。中间imsa 247包含外表面248和后缘250。
[0240]
流管254包围所有流线,这些流线围绕imsa 241,即穿过imsa241内部。上游工位255处的流管的横截面积大于工位256处的横截面积,而工位256处的横截面积又小于下游工位257处的横截面积。
[0241]
图15是另一种ifma配置270的透视图。图15所示的装置的一些特征以及该装置的一些操作原理与其它附图(特别是图7)中示出的装置具有相似性,因此在图15的上下文中将不再详细描述,反之亦然。
[0242]
ifma配置270描绘为固定翼飞行器,诸如商业运输机或喷气式客机,诸如波音737(boeing 737)或空中客车a320(airbus a320)。有机身293、左翼300和右翼299、包含方向舵的垂直尾翼301、以及全飞行左水平稳定器304和全飞行右水平稳定器。在标称水平巡航期间,ifma 270的飞行方向基本上在推力矢量292的方向上。在标称水平巡航期间,实施例270周围的空气相对于实施例270的自由流流动方向用箭头305指示。
[0243]
存在上游imsa 271,该上游imsa 271在该实施例中可以描述为导管风扇。该实施例中,导管配置为使流动在遇到位于风扇内的风扇盘之前减速。对于一些实施例,可以以这种方式来避免或减轻与风扇盘相关联的波阻力损失。上游imsa 271包含导管272和风扇盘。上游imsa 271配置为向ifma配置270施加力,该力指向与相对于ifma 270的平均自由流流动相同的方向,如推力矢量281所示。上游imsa 271配置为从周围流体提取能量。ifma 270
配置为将至少一部分能量传递到下游imsa 282。如上所述,通过将上游imsa 271的风扇盘连接到下游imsa 282的风扇盘的机械驱动轴,可以促进传递。上游imsa 271的风扇盘可以经由例如直接的、刚性的机械连接将功率传输到下游imsa 282的风扇盘。上游imsa 271的风扇盘可以经由驱动轴和齿轮系将功率传输到下游imsa 282的风扇盘。所述驱动轴可以穿过机身293。上游imsa 271的风扇盘可以经由发电机将功率传输到下游imsa 282的风扇盘,发电机经由电线或导体将功率传输到电动机,其中电动机将功率传输到下游imsa 282的风扇盘。上游imsa 271和下游imsa 282刚性附接到机身293。
[0244]
在一些实施例中,下游imsa 282可以描述为涡轮风扇发动机。在功率从上游imsa 271传递到下游imsa 282的情况下,下游imsa 282可以描述为混合电动涡轮风扇发动机。在其它实施例中,下游imsa 282可以描述为涡轮喷气发动机。下游ims 282包含导管283。下游imsa 28配置为对实施例270施加力,该力指向与相对于ifma配置270的平均自由流流动相反的方向,如推力矢量292所示。在该实施例中,下游imsa 282的推力大小大于上游imsa271的推力大小。因此,下游imsa 282配置为满足ifma配置270的任何未解决的推力要求。在其它实施例中,至少一个单独的推进单元或发动机可以附接到至少一个机翼。例如,此类单独发动机可以是传统的涡轮风扇或混合电动涡轮风扇。
[0245]
上游imsa 271可以配置为人为减小至少机身293的局部自由流流动,并且下游imsa 282配置为抵消机身293的尾流中和机身293附近的流速的至少一部分减小。
[0246]
在一些实施例中,上游imsa 271可以视为产生机身293的人工边界层,其中边界层大致由穿过导管272内部的流管包围。应当注意,机身293和人工边界层也可以视为由自然边界层包围。上游imsa 271配置为以如下方式来改变该人工边界层内或机身293的润湿表面附近的速度分布:与不存在上游imsa 271的基线情况相比,即与机身仅由自然边界层包围的情况相比,减小机身293和ifma配置270整体上的阻力。例如,阻力的减小可以包含粘性阻力的减小、和/或波阻力或压缩性阻力的减小。阻力减小与通过上游imsa 271和较小程度上的下游imsa 282改变相对于机身293的流体流速的空间分布相关联。
[0247]
通过上游imsa 271减小机身293的局部自由流流体流速的大小、减小机身293的润湿表面处和相对于润湿表面的流体流速、以及在机身293的润湿表面附近产生更有利的速度分布可以有助于所述粘性阻力的减小。例如,更有利的速度分布可以包含减小的峰值空间流体流速梯度或者在ifma配置270附近的空间流体流速梯度的减小空间平均幅度。
[0248]
波阻力的减小可以是当流体围绕ifma配置270流动时流体流动方向的更平缓变化,或ifma配置270对流体的更平缓位移的结果。这通过上游imsa 271对流体流动的减速和imsa282对流体流动的加速来促进。因此,可以减小ifma配置270对流体流动的干扰强度,这可以减小与imfa配置270相关联的波阻力。
[0249]
阻力的减小可以与基线情况相比降低ifma配置270的功耗,或者对于给定功耗,允许ifma配置270相对于流体更快地移动。这可以增大ifma配置270的范围或最高速度。
[0250]
图16是另一种ifma配置315的斜俯视图。图16所示的装置的一些特征以及该装置的一些操作原理与其它附图(特别是图3)中示出的装置具有相似性,因此在图16的上下文中将不再详细描述,反之亦然。
[0251]
ifma配置315可以描述为四旋翼直升机或四翼飞机。实施例315也可以描述为八旋翼或多旋翼。ifma配置315包含四个imsa组件,诸如imsa组件316、339、362和385。每个imsa
组件包含上游imsa(诸如imsa组件362的上游imsa 365)和下游imsa(诸如imsa组件362的下游imsa 375)。
[0252]
每个上游或下游imsa可以描述为螺旋桨。每个螺旋桨可以包括第一螺旋桨叶片(诸如下游imsa 375的第一螺旋桨叶片377)和第二螺旋桨叶片(诸如下游imsa 375的第二螺旋桨叶片378)。在其它实施例中,螺旋桨可以包括至少一个叶片或仅一个叶片。在其它实施例中,螺旋桨可以包括至少3个叶片。螺旋桨毂(诸如螺旋桨毂379或369)将每个螺旋桨连接到驱动轴或致动器。
[0253]
ifma配置315显示为悬停。由imsa组件引起的流动被引导到垂直向下的方向,即基本上与推力矢量380对准。
[0254]
上游imsa(诸如上游imsa 365)配置为产生作用在ifma配置315上的推力,该推力指向向上方向,如推力矢量370或347所示。下游imsa(诸如下游imsa 375)配置为产生作用在实施例315上的推力,该推力指向向下方向,如推力矢量380或357所示。
[0255]
与其中imsa组件仅包含一个imsa(即仅上游imsa)的情形相比,上游imsa被配置成相对于自身增大局部自由流流速。相应的下游imsa配置为抵消上游imsa的尾流中的流体流动中的任何过量动量。应当注意,在标称悬停期间,由所有四个imsa组件产生的净推力的总和基本上等于ifma配置315的重量。在标称悬停期间,由任何一个imsa组件产生的净推力基本上等于由四个imsa组件中的任何其它组件产生的净推力。在标称悬停期间,由任何一个imsa组件产生的净推力基本上等于由四个imsa组件中的任何其它组件产生的净推力。在标称悬停期间,下游imsa的推力矢量的大小小于相应上游imsa的推力矢量的大小。
[0256]
ifma配置315中的每个imsa组件还包含机舱,诸如机舱340,该机舱容纳有助于将能量从下游imsa传递到上游imsa的致动器、发电机、齿轮箱或驱动轴。应当注意,第一imsa组件的下游imsa也可以向第二imsa组件的上游imsa传输功率。
[0257]
在图16所示的配置中,imsa组件的诱导功率消耗低于等效基线或参考配置的诱导功率消耗,其中下游imsa对流体的影响可忽略不计,即上游imsa的推力基本上等于净推力要求。在基线配置中,imsa组件可以视为仅包含上游imsa。应当注意,如上所述,在一些实施例中,imsa(诸如上游imsa)可以包含若干螺旋桨或推力装置。在这种情况下,基线配置与传统的四旋翼直升机相同。
[0258]
每个imsa组件经由梁刚性地连接到机身408。每根梁均封装在空气动力学或流体动力学整流罩中,诸如梁整流罩341。在一些实施例中,梁整流罩可转动地连接到梁,即能够相对于机身408和相应机舱转动。在一些实施例中,至少一个射束整流罩可用于在标称水平巡航期间产生升力,其中该升力以与常规固定翼飞机的升力相似的方式产生,其中机身长轴定向在基本上水平的方向,即惯性系中的运动方向,并且其中至少一个imsa组件被配置成产生净推力,该净推力抵消作用在ifma配置315上的阻力。应当注意,在一些实施例中,可以改变一些imsa的螺旋桨的桨距角。应当注意,在巡航期间,可以对一些imsa组件的螺旋桨进行顺桨。
[0259]
在一些实施例中,上游imsa可以由电动机供电。在一些实施例中,上游imsa可以由包含永磁体的无刷dc电动机供电。在一些实施例中,imsa组件可以由ac感应电动机供电。在一些实施例中,上游imsa的驱动轴刚性地连接到相应的下游imsa的驱动轴。在一些实施例中,为驱动轴提供动力的致动器刚性地连接到直接驱动配置中的驱动轴。在一些实施例中,
致动器经由离合器或齿轮系连接到驱动轴。例如,动力可以由电池、内燃机或涡轮轴发动机来提供。为一个或多个imsa组件提供动力的致动器也可以位于机身408内。例如,功率可以从此类致动器机械地或电性地传输到imsa组件。
[0260]
在一些实施方案中,上游或下游imsa包含若干螺旋桨。例如,上游或下游imsa可以包含至少两个反向转动的或同向转动的同轴螺旋桨。
[0261]
应当注意,上游imsa和相应下游imsa的螺旋桨不需要同相,并且在标称操作期间不需要以相同的角速度转动。在一些实施例中,对于上游imsa和下游imsa之间的给定间隔距离,存在最优相位角,其中最优性可以指飞行器运行成本的最小化或飞行器耐久性的最大化。
[0262]
图17是另一种ifma配置425的斜俯视图。图17所示的装置的一些特征以及该装置的一些操作原理与其它附图(特别是图3)中示出的装置具有相似性,因此在图17的上下文中将不再详细描述,反之亦然。
[0263]
ifma配置425可以描述为传统直升机。ifma配置425包含具有窗口449的机身448和尾旋翼组件451。
[0264]
ifma配置425显示为处于标称悬停状态,其中诱导流动指向竖直向下方向,如流动方向456所示。
[0265]
上游imsa 426配置为产生作用在ifma配置425上的推力,该推力指向向上方向,如与第一旋翼叶片427相关联的推力矢量434或与第二旋翼叶片430相关联的推力矢量435所示。第一叶片427和第二叶片430经由旋翼毂433连接到驱动轴。驱动轴可以由空气动力学整流罩436包围。
[0266]
下游imsa 437配置为产生作用在实施例425上的推力,该推力指向向下方向,如与第一旋翼叶片438相关联的推力矢量445或与第二旋翼叶片441相关联的推力矢量446所示。第一叶片438和第二叶片441经由旋翼毂444连接到驱动轴。驱动轴可以由空气动力学整流罩447包围。在一些实施例中,上游imsa 426和下游imsa 437的驱动轴是相同的。在其它实施例中,上游imsa 426的驱动轴以同轴配置的方式穿过下游imsa 437的驱动轴的中心。在其它实施例中,机身448位于上游imsa 426与下游imsa 437之间。
[0267]
ifma配置425的主旋翼系统可以描述为包含上游imsa 426和下游imsa 437的imsa组件。在图17所示的悬停配置中,imsa组件的诱导功率消耗低于等效基线或参考配置的诱导功率消耗,其中下游imsa对流体的影响可忽略不计,即上游imsa的推力基本上等于净推力要求。在基线配置中,imsa组件可以视为仅包含上游imsa。在这种情况下,基线配置与传统直升机相同。
[0268]
在标称水平巡航的操作条件范围内,下游imsa 437的至少一部分不再位于上游imsa426的尾流中。当该部分足够大时,下游imsa 437可以顺桨。在一些实施例中,下游imsa 437的顺桨可以包含将旋翼叶片的角速度减小到零。在一些实施例中,将下游imsa 437的旋翼叶片折叠。例如,旋翼叶片可以折叠成用于标称水平巡航的空气动力学整流罩。在其它实施例中,在标称水平巡航期间,下游imsa 437可以配置为产生推力或升力,该推力或升力沿着上游imsa 426的升力矢量的推力具有正分量。在这点上,下游imsa 437和上游imsa 426可以以与现有技术中同轴直升飞机的旋翼相似的方式来操作或配置。
[0269]
应当注意,一些实施例的原理也可以应用于倾转旋翼机。例如,倾转旋翼机的单个
旋翼可以用由支撑轴分开的两个旋翼代替,类似于两个旋翼,即上游imsa 426和下游imsa 437,如图17所示。以这种方式,一些实施例的优点可以用于巡航飞行和悬停飞行。
[0270]
图18是另一种ifma配置470的斜侧视图。图18所示的装置的一些特征以及该装置的一些操作原理与其它附图(特别是图3)中示出的装置具有相似性,因此在图18的上下文中将不再详细描述,反之亦然。
[0271]
ifma配置470可以描述为风力涡轮机。风向由箭头501指示。ifma配置470包括可转动地连接到水平机舱495的垂直支架496,其中转动轴平行于垂直轴。上游imsa 471和下游imsa 483可转动地连接到机舱495,其中转动轴是同轴的并且平行于水平轴。
[0272]
上游imsa 471在该实施例中可以描述为螺旋桨,并且包含第一叶片472、第二叶片478和第三叶片475。每个叶片可转动地连接到旋翼毂481,其中转动轴基本上平行于叶片的长轴。每个旋翼叶片的桨距角可以根据风力条件来调节,以便优化风力涡轮机的性能,其中性能可以指例如从风中提取的功率。上游imsa 471被配置成在下游imsa 483的位置处使流体流动加速,即增大流体相对于惯性系的速度的大小。上游imsa 471在实施例470上施加指向上游方向的推力,如推力矢量482所示。
[0273]
下游imsa 483在该实施例中可以描述为螺旋桨,并且包含第一叶片484、第二叶片490和第三叶片475。每个叶片可转动地连接到旋翼毂493,其中转动轴基本上平行于叶片的长轴。可以调节每个旋翼叶片的桨距角。下游imsa 483被配置成在下游imsa 483的下游使流体流动减速,即减小流体相对于惯性系的速度的大小。下游imsa 483在ifma配置470上施加指向下游方向的推力,如推力矢量494所示。由下游imsa 483从流体中提取的一部分功率传递到上游imsa 471,并且一部分所传递的功率由上游imsa 471施加到流体。如上所述,例如,该功率可以机械或电性传递。
[0274]
ifma配置470的旋翼系统可以描述为包含上游imsa 471和下游imsa 483的imsa组件。在图18所示的配置中,imsa组件从周围流体(例如风或水流)的运动中提取的功率大于等效基线或参考配置所提取的功率,其中上游imsa对流体的影响可忽略不计,即基线配置中的下游imsa的推力基本上等于图18中所示的ifma配置470的净推力。在基线配置中,imsa组件可可以视为仅包含下游imsa。对于所描绘的构型,基线配置与传统风力涡轮机相同。在低风速或低流速下,性能的改善尤为显著。
[0275]
图19是另一种ifma配置515的侧视图。图19所示的装置的一些特征以及该装置的一些操作原理与其它附图(特别是图7)中示出的装置具有相似性,因此在图19的上下文中将不再详细描述,反之亦然。
[0276]
ifma配置515也可以描述为船舶,该船舶具有船体536、水面548上方的上部结构539和水面下方的方向舵542。
[0277]
上游imsa 516可以描述为至少具有第一螺旋桨叶片517和第二螺旋桨叶片520的螺旋桨。每个螺旋桨叶片可转动地连接到毂523,其中转动轴平行于叶片的长轴。每个螺旋桨叶片的桨距可以根据船舶的操作条件进行调节。上游imsa 516由整流罩525支撑,在一些实施例中,整流罩525包围刚性连接到毂523的驱动轴。在一些实施例中,毂523以直接驱动配置的方式连接到发电机。上游imsa 516配置为使流动减速并且减小船体536的局部自由流流动。因此,上游imsa 516对ifma配置515施加推力,该推力指向流体流动相对于船体536的方向,如推力矢量524所示。
[0278]
下游imsa526可以描述为至少具有第一螺旋桨叶片533和第二螺旋桨叶片530的螺旋桨。每个螺旋桨叶片可转动地连接到毂,其中转动轴平行于叶片的长轴。每个螺旋桨叶片的桨距可以根据船舶的操作条件进行调节。下游imsa 526由整流罩535支撑,在一些实施例中,整流罩535包围刚性连接到所述毂的驱动轴。在一些实施例中,毂以直接驱动配置的方式连接到电动机。下游imsa 526配置为使流动加速。因此,下游imsa526对ifma配置515施加推力,该推力指向流体流动相对于船体536的相反方向,如推力矢量534所示。
[0279]
上游imsa 516可以减小ifma配置515的阻力。阻力减小可以包含船体536的粘性阻力的减小和/或船体536的重力波阻力的减小。阻力减小与通过上游imsa 516改变流体流速相对于船体536的空间分布相关联。通过上游imsa 516减小船体536的局部自由流流体流速的大小、减小船体536的润湿表面处和相对于润湿表面的流体流速、以及在船体536的润湿表面附近产生更有利的速度分布可以有助于所述粘性阻力的减小。例如,更有利的速度分布可以包含减小的峰值空间流体流速梯度或者在ifma配置515附近的空间流体流速梯度的减小空间平均幅度。波阻力的减小可以是当流体围绕ifma配置515流动时流体流动方向的更平缓变化的结果,或由于上游imsa 516对流体流动的减速和imsa 526对流体流动的加速导致的ifma配置515对流体的更平缓位移的结果。因此,可以减小ifma配置515对流体流动的干扰强度。在一些实施例中,例如,上游imsa 516可以配置为执行与传统船体设计中发现的球形船首相似的功能。
[0280]
图20是另一种ifma配置560的侧视图。图20所示的装置的一些特征以及该装置的一些操作原理与其它附图(特别是图7)中示出的装置具有相似性,因此在图20的上下文中将不再详细描述,反之亦然。
[0281]
ifma配置560也可以描述为火车或卡车,并且包含第一车厢61、第二车厢576、第三车厢577、第四车厢589和第五车厢591。每个车厢由车轮(诸如车轮563)支撑,车轮563便于车厢相对于道路或轨道605的运动。每个车厢通过连接件(诸如连接件566)连接到相邻车厢。车厢通过支撑结构(诸如支撑结构578)可转动地连接到车轮。
[0282]
上游imsa 567可以描述为至少具有第一螺旋桨叶片568和第二螺旋桨叶片571的螺旋桨。每个螺旋桨叶片可转动地连接到毂574,其中转动平行于叶片的长轴。每个螺旋桨叶片的桨距可以根据飞行器的操作条件进行调节。上游imsa 567配置为使流动减速并且减小剩余飞行器的局部自由流流动。因此,上游imsa 567对ifma配置560施加推力,该推力指向流体流动相对于ifma配置560的方向,如推力矢量575所示。
[0283]
下游imsa 596可以描述为螺旋桨。在ifma配置560中,第一车厢561可以与第五车厢591相同,以便降低实施例560的制造成本。应当注意,第一车厢561以与第五车厢591不同的方式操作。下游imsa 596配置为使流动加速。因此,下游imsa 596对ifma配置560施加推力,该推力指向流体流动相对于实施例560的相反方向,如推力矢量604所示。
[0284]
由于ifma配置560的长度,上游imsa574的减阻效果随着沿着实施例560的长度与上游imsa574的距离增大而减小。例如,这可能是由于粘性效应。中间imsa 580配置为与ifma配置560的外表面附近的理想速度分布相比,校正实际速度分布的任何失真效应。中间imsa580至少包含第一螺旋桨叶片581和第二螺旋桨叶片584。每个螺旋桨叶片可转动地连接到毂587,其中转动轴平行于叶片的长轴。每个螺旋桨叶片的桨距可以根据飞行器的操作条件进行调节。中间imsa 580配置为使流动减速并且减小剩余飞行器的局部自由流流动。
因此,中间imsa 580对ifma配置560施加推力,该推力指向流体流动相对于实施例560的方向,如推力矢量588所示。
[0285]
在一些实施例中,作用在中间imsa 580和下游imsa 596之间的飞行器部分上的阻力与作用在中间imsa 580上的推力或阻力之和小于在没有中间imsa的情形下(即在以与第二车厢576相似的方式配置第三车厢的情形下)作用在本实施例的第三车厢和最后一节车厢之间的阻力。对于一些实施例,对于一些操作条件,作用在没有专用中间imsa(诸如中间imsa580)的实施例上的净牵引阻力大于作用在ifma配置560上的净牵引阻力。应当注意,一些实施例可以包含以与中间imsa 580相似的方式配置的若干个中间imsa。应当注意,可以有若干个车厢(诸如车厢576)位于上游imsa、中间imsa或下游imsa之间。在一些实施例中,相邻车厢之间的连接包含空气动力学整流罩,该空气动力学整流罩配置为允许车厢在道路或轨道中的弯道或弯曲期间相对于彼此转动。
[0286]
上游imsa 567和中间imsa 580可以配置为从周围流体中提取能量,而下游imsa 596可以配置为将至少一部分提取的能量施加到ifma配置560周围的流体。应当注意,与ifma配置560相似的实施例可以包括单独的牵引电动机,该牵引电动机配置位通过向至少一个车轮传递扭矩来促进实施例的推进。在其它实施例中,实施例的任何未解决的推力要求由下游imsa 596来提供。
[0287]
图21是另一种ifma配置620的侧视图。图21所示的装置的一些特征以及该装置的一些操作原理与其它附图(特别是图7和图20)中示出的装置具有相似性,因此在图21的上下文中将不再详细描述,反之亦然。
[0288]
ifma配置620也可以描述为火车或卡车,并且包含第一车厢621、第二车厢632、第三车厢633、第四车厢634、第五车厢646和第六车厢647。每个车厢由车轮(诸如车轮623)支撑,车轮623便于车厢相对于道路或轨道657的运动。每个车厢通过连接件(诸如连接件626)连接到连接到相邻车厢。车厢通过支撑结构可转动地连接到车轮。
[0289]
上游imsa 627可以描述为导管风扇,该导管风扇包含围绕螺旋桨的导管628,该螺旋桨至少具有第一螺旋桨叶片和第二螺旋桨叶片。每个螺旋桨叶片可转动地连接到毂,其中转动轴平行于叶片的长轴。每个螺旋桨叶片的桨距可以根据飞行器的操作条件进行调节。上游imsa 627配置为使流动减速并且减小剩余飞行器的局部自由流流动。因此,上游imsa 627对实施例620施加推力,该推力指向流体流动相对于实施例620的方向,如推力矢量631所示。
[0290]
下游imsa 652可以描述为导管风扇。在ifma配置620中,第一车厢621与第六车厢647相同,以便降低实施例620的制造成本。应对注意,第一车厢621以与第六车厢647不同的方式操作。下游imsa 652配置为使流动加速。因此,下游imsa 652对实施例620施加推力,该推力指向流体流动相对于实施例620的相反方向,如推力矢量656所示。
[0291]
ifma配置620可以包括一个中间imsa,与实施例560相似。在ifma配置620中,中间imsa由两个车厢(即第三车厢633和第四车厢634)而不是一个车厢来实现。这两节车厢都与第六车厢647或第一车厢621相同,以便降低实施例620的制造成本。在该实施例中,第三车厢633的导管风扇634是顺桨的。第四车厢634的导管风扇640以与图20中的中间imsa 580相似的方式来配置。因此,imsa 640对实施例620施加推力,该推力指向流体流动相对于实施例620的方向,如推力矢量644所示。
[0292]
上游imsa可以减小ifma配置560或620的阻力。阻力减小可以包含车厢的粘性阻力的减小。阻力减小与通过上游imsa改变相对于ifma配置560或620和在ifma配置560或620附近的流体流速的空间分布相关联。该改变可以指减小流体流动的空间速度梯度的平均大小。例如,可以以最小化受限于约束条件(诸如结构或经济限制)的ifma配置560或620的总功耗的方式对上游imsa和下游imsa的配置进行数学优化。
[0293]
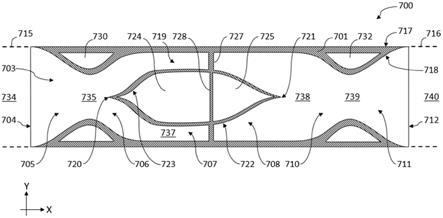
图22是根据一些实施例的导管装置700的剖视图。图1中所示的装置的一些特征以及该装置的一些操作原理与其它附图中所示的装置具有相似之处,因此将不在图22的上下文中以相同的细节进行描述,反之亦然。
[0294]
导管装置700可以包围机身装置719。如图所示,导管装置700在沿x轴观察时的横截面为圆形,并且围绕平行于x轴的轴轴向对称。导管装置700是imca的实施例。导管装置700可以包括外表面717和通道703,通道703的内表面718位于第一开口704和第二开口712之间,其中通道可形成为包括第一收缩部705、第一膨胀部706、当在x方向上观察时横截面积基本上恒定的区域、第二膨胀部708、第二收缩部710和第三膨胀部711。应当注意,术语“收缩部”和“膨胀部”是指轴向对称通道的半径的相对大小。
[0295]
导管装置700可以包括第一隔室730和第二隔室732。这些隔室可用于多种用途。在一些实施例中,它们可以用于固定起落架、燃料、货物或其它提升或推力机构的部件。
[0296]
应当注意,通道半径或几何形状可以作为沿x轴的位置的函数以不同的方式改变,或者对于其它实施例或其它操作条件以不同的方式配置。在一些实施例中,不需要第三膨胀部711,即第二开口可以位于第二收缩部710的末端。在一些实施例中,通道703或外表面717的横截面几何形状可以是正方形、矩形或椭圆形。在一些实施例中,通道703的横截面几何形状可以例如在正x方向上从正方形改变为圆形。
[0297]
对于一些实施例,圆形或环形通道703的横截面积可随时间变化。例如,可以针对不同的操作条件改变工位739处的通道的半径。半径可以根据自由流流速大小增大或减小。以这种方式,可以改变和控制通过导管703的流动的特性,使得本发明的原理可以应用于不同的自由流流动条件。例如,可以通过控制在工位739处的通道703的横截面积来调节在第一膨胀部706或第二膨胀部708内的冲击波的存在或位置。可以使用多种方法来改变通道的横截面积作为时间的函数。例如,连接到导管装置700的坡道可以液压地延伸到通道中,从而减小通道的横截面积。在另一实例中,位于通道703内的尖钉可沿通道的长度,即沿x方向轴向地朝向或远离通道的收缩部移动,从而分别减小或增大通道703的环形横截面积。
[0298]
导管装置700可以由散装材料70构成,其可以包括诸如铝、钢或钛的金属合金。在一些实施例中,散装材料701包含复合材料,诸如碳纤维或玻璃纤维。
[0299]
在一些实施例中,机身装置719包括前缘点720、后缘点721、内表面723和外表面722。在一些实施例中,第一机身隔室724通过隔板728与第二机身隔室725分离。机身装置719可以通过一个或多个支撑杆(诸如支撑杆727)刚性地连接到导管装置700。在一些实施例中,支撑杆可以仅少量地减小支撑杆位置处的通道703的横截面积。在一些实施例中,机身可被配置成例如承载货物、乘客或燃料。
[0300]
如先前所定义的,本发明的实施例至少部分地被流体包围。应当注意,不同类型的流体可以同时包围本发明的实施例的至少一部分。例如,诸如船舶的横贯水的实施例可以被水和空气(即液体流体和气态流体)包围。在图22中,流体是可压缩的。例如,流体可以是
诸如空气的气体。
[0301]
图22中所示的操作条件可以包括标称水平巡航操作条件。在所示的简化情形中,相对于导管装置700的质心的自由流流动在时间上是恒定的,并且在大小和方向上在空间上是均匀的,其中方向平行于x轴。在所示的操作条件下,相对于导管装置700的自由流流速大小大于流体中的声速。由于在这种情形下假定风速可忽略不计,因此这相当于导管装置700相对于流体以比惯性参考系中的流体中的声速更快的速度运动。在图22中,相对于导管装置700的自由流流速与x轴对准并平行于x轴,即从页面的左侧到页面的右侧。
[0302]
虚线715和716指示停滞流线,其入射在导管装置700的前缘上或始于导管装置700的后缘。因此,流线715和716是流表面或流管的一部分,流表面或流管将围绕导管装置700流动的流体与在导管装置700的通道703中流动的流体分离。在该实施例中,当沿x方向观察时,流管是圆形的。
[0303]
导管装置700上游的流体(例如在工位734处)相对于导管装置700的移动速度快于图22所示配置中流体中的声速。通道703的第一收缩部705、第一膨胀部706和第二膨胀部708被配置成在正x方向上压缩流过通道703的流体。第一喉部被定义为通道703的部分,当沿x方向观察时,在第一收缩部710和第一膨胀部711之间具有通道703的最小横截面积。流体相对于第一喉部(即工位735)处的导管装置700的平均速度大约等于该位置处的流体内的声速。在该实施例中,在上游,诸如在工位734处,平均相对速度大于声速,而在下游,诸如在工位737或738处,平均相对速度小于流体内的声速。在所示的实施例中,当忽略摩擦时,通过通道703的流动基本上是绝热的和等熵的。在其它实施例中,在第一喉部和工位738之间可以存在冲击波。换言之,第一喉部下游的流体的相对流速可以比流体内的声速快,其中在整个冲击波中,相对流速降低至慢于声速的速度,从而在工位738处产生慢于声速的相对流速,如在其中第一喉部处存在无限弱的冲击的理想的情形下。
[0304]
通道703的第二收缩部710和第三膨胀部711两者均被配置成在正x方向上膨胀在通道703中流动的流体。第二喉部被定义为通道703的部分,当沿x方向观察时,在第二收缩部710和第三膨胀部711之间具有通道703的最小横截面积。流体相对于第二喉部(即工位739)处的导管装置700的平均速度大约等于该位置处的流体内的声速。在该实施例中,在上游,诸如在工位738处,平均相对速度小于声速,而在下游,诸如在工位740处,平均相对速度大于流体内的声速。
[0305]
应当注意,在其它实施例中,诸如机身装置719的机身可以并入到导管装置中。例如,此类实施例不需要以诸如机身装置719的位于中心的机身为特征,但是可以位于环形体积中。例如,第一隔室730或第二隔室732可以被视为并且被配置为机身。在另一实例中,轴向对称的机身装置719不需要与轴向对称的导管装置700同心地布置。换言之,机身装置719的中心轴不必与导管装置700的中心轴一致。例如,机身装置可以与导管装置700的内表面718齐平布置,类似于第一隔室730,而不是如22所示位于通道703内的中心。在这种情况下,机身外表面722与通道703的内表面718相同,并且通道703仅穿过机身的中心。与类似于图22中所示的实施例的配置相比,这可以减小润湿区域和粘性阻力。对于一些实施例,可以认为第一隔室730通过嵌入在导管装置700内的环形机身段以与第一隔室730相似的方式连接到第二隔室732。在一些实施例中,第一隔室730和第二隔室732可以被视为是一致的。应当注意,当沿x方向观察时,由机身的横截面相对于导管装置700的中心轴所成的角度不必如
在以环形第一隔室730为例的周向情况中那样为360度,但是可以为例如200度,或100度或60度。在其它实施例中,当沿x方向观察时,机身装置719的横截面可以是椭圆形或矩形的。
[0306]
以大于流体中波速的速度在流体中移动的扰动通常会引起波阻力。波阻力是扰动产生的波能量的量度。有几种方法可以量化波阻力。例如,波阻力可以由特定扰动产生的波功率除以平均自由流流速大小来计算。
[0307]
可能由被配置成置换流体的体积引起扰动。该体积可以是产生重力波的船体,也可以是产生冲击波的超音速飞机的机身或机翼。扰动还可能由被配置成在指定位置改变流体流动特性的设备引起,其中该改变可能包含例如流动方向的变化,或惯性空间中流速大小的变化或流体温度的变化。例如,此类设备可以是电场或磁场生成装置或激光器。表面的不连续性也会对相邻的流场造成扰动。扰动可能会使流体流动移位,进而引起空气中的冲击波或水中的表面重力波。
[0308]
根据本发明的一些实施例,可以采用导管装置以减小与扰动相关的波阻力的方式来操纵扰动附近的流体流动。
[0309]
例如,对于通过诸如水的不可压缩流体行进的实施例,可以通过如下配置的导管装置来减小由于表面波引起的阻力。在通过入口进入导管装置之后,流体通过第一收缩部而加速,其中在一些实施例中,可以以与第一收缩部705类似的方式配置第一收缩部,并且可以以与第一开口704相似的方式配置入口。应当注意,在这种情况下,在第一收缩部中的流体的加速与在图22所示的实施例中的流体的减速相反。在一些实施例中,在第一收缩部中被加速之后,流体流过具有基本上恒定的横截面积的截面。例如,流体可以流过横截面为圆形的管道或通道。在其它实施例中,管道具有环形横截面积,诸如在图22中的工位737处的通道703的环形部分。对于给定的横截面积,随着润湿面积的减小,圆形横截面可能比环形横截面更有利。在一些实施例中,所述管道基本上是直的。在一些实施例中,该管道包含曲线或弯曲。例如,管道可以引导流体围绕集装箱船的货舱流动。在具有基本上恒定的横截面的截面之后,流体流动随后进入第一膨胀部,其中流体在通过出口或第二开口流出之前被减速。在一些实施例中,离开出口的流体的速度基本上等于自由流流速。在一些实施例中,出口速度可以大于或小于自由流流速。在导管装置用于船舶上的情况下,导管装置的前缘形成船首,并且导管装置的外表面,诸如导管装置700的外表面717,形成船舶的外部船体,并且导管装置的后缘形成船尾。导管装置外表面内未被流经通道的流体所占据的体积(包含第一收缩部、横截面积基本上恒定的管道和第一膨胀部)可被视为船舶的有效体积,其例如可以包含货舱或乘客舱。当在流向上观察时,导管装置可以具有圆形横截面。在其它实施例中,导管装置可以具有类似于常规船舶的船体的半圆形横截面。为了减小与水中的重力波相关联的波阻力,仅与水接触的船舶的一部分可以被所述导管装置包围、嵌入其中或配置为所述导管装置。
[0310]
在标称操作期间,导管装置可被配置成减小与通过流体移动有效体积或其它扰动相关联的波阻力。与导管装置相互作用的流体可根据流经导管装置内部通道的流体(表示为“内部流体”)和在导管装置外表面的一侧不流经内部通道而是围绕导管装置流动的流体(表示为“外部流动”)进行区分。导管装置被配置成减小施加在外部流动上的扰动。在该实施例中,这是通过平行于自由流流动的外表面来实现的。例如,导管装置700的外表面呈圆柱形并平行于自由流流动。因此减小了由外表面施加的扰动。在一些实施例中,导管装置的
外表面的圆形的沿流向的横截面例如可以在下游方向上减小直径。这可以减小边界层在外部流动的位于外表面的边界层之外的部分上的扰动。在一些实施例中,当忽略摩擦时,与导管装置的外表面相关联的波阻力可忽略不计。
[0311]
导管装置还可被配置成减小与内部流动相关联的波阻力。在一些实施例中,在标称操作期间,与入口上游的内部流动相关联的流管的横截面积和形状基本上等于入口的横截面积和形状。在其它实施例中,前者的横截面积可以大于或小于后者的横截面积。例如,在其它实施例中,前者的横截面积的形状可以大于后者的横截面积。由于目标可以是最小化总阻力,而不仅仅是波阻力,因此与现有技术中的实施例相比,一些实施例可以具有减小的但非零的波阻力。在一些实施例中,在标称操作期间,与出口下游的内部流动相关联的流管的横截面积和形状基本上等于出口的横截面积和形状。例如,在其它实施例中,前者的横截面积可以大于后者的横截面积。在其它实施例中,前者的横截面积的形状可以大于或小于后者的横截面积。在一些实施例中,施加在内部流动上的扰动在外部流动上产生可忽略的扰动或可忽略的波阻力。在一些实施例中,与现有技术中的实施例相比,减小了由内部流动的扰动向外部流动施加的波阻力。一般而言,由于围绕有限体积的初始偏转而对流体施加的扰动的大小,诸如在第一收缩部中施加的扰动,可以通过将扰动控制在导管装置内部来减小,直到可以通过第二次扰动(诸如在导管装置的第二开口之前由第一膨胀部施加的扰动)来消除或减轻。
[0312]
在一些实施例中,推进单元位于导管装置的通道内,其中推进单元可以包含至少一个螺旋桨,其被配置成类似于海上泵喷射螺旋桨来加速流体。例如,螺旋桨可以位于第一收缩段中,其中螺旋桨的推力指向上游方向。在一些实施例中,螺旋桨可用于减小或避免第一收缩部的内壁附近的局部压力增大,并确保第一收缩部内的均匀流动。第一收缩部被配置成以与其它配置相比减小导管装置的波阻力的方式使第一收缩部内的流体加速。为此,当在平行于自由流的方向上,即在流向上观察时,对于第一收缩部的给定横截面积,流体流速大小的变化可以减小。例如,这可以通过推进单元或位于第一收缩部内的环形箔来实现。此类流体流动操纵装置可以确保第一收缩部的横截面积的减小伴随着第一收缩部中的流体流速大小的相应增大以及第一收缩部中的流体压力的相应减小。可以以类似方式配置第一膨胀部。
[0313]
在一些实施例中,螺旋桨可位于第一膨胀段中,其中螺旋桨的推力指向下游方向,并且其中从流体中提取的能量的至少一部分被机械地或电气地回收并存储以供以后使用或用于做有用的工作,诸如在第一收缩部中为上游螺旋桨提供动力。膨胀段中的螺旋桨可用于调节通过通道的流体流速。此类螺旋桨也可以用于避免或减小第一膨胀段中的流动分离,这可以减小膨胀段的沿流向的长度。在其它实施例中,可以将环形箔或导管放置在膨胀段内,以避免或减小由于流动分离引起的阻力。在一些实施例中,推进单元可以被放置在第一膨胀部和第一收缩部之间。例如,此类推进单元可以用于至少抵消由于摩擦而导致的通过导管装置的流体流速的降低。
[0314]
在另一实例中,对于以大于流体中波速的速度行进通过可压缩流体的扰动,可以通过如图22所示配置的导管装置来减小与扰动相关联的波阻力。例如,尽管本发明的原理可以应用于其它类型的波,但是所讨论的波可以是声波或冲击波。在此类实施例中,导管装置可被配置成在扰动附近人为地降低流体流速。在图22中,所讨论的扰动可以被视为是机
身719,尽管导管装置本身也对流体流动施加扰动。在导管装置的情况下,至少一部分扰动,诸如与使流体偏转或减速或加速相关联的扰动,被配置成彼此抵消或在导管装置附近被抵消。在该特定实施例中,与机身装置719相关联的一部分扰动,诸如与使流体偏转或减速或加速相关联的扰动,也被配置成彼此抵消或在导管装置附近被抵消。在其它实施例中,不需要消除由机身装置施加到流体的至少一种类型的扰动,但是可以在导管装置和机身装置的下游的远尾流中显示其自身,如图24所示的实施例的上下文中所讨论的那样。
[0315]
在图22中,当假定粘性阻力为零时,位于流管715外部的流动不会受到任何扰动。这是由于平行于自由流流动的圆柱形外表面717。因此,外表面717附近的流动仅偏转最小量。例如,该偏斜可以归因于与外表面717相关联的边界层。在其它实施例中,外部流动可经历局部扰动。导管装置的外表面不必平行于自由流流速。例如,外表面的沿流向的横截面积可以在下游方向上增大或减小。例如,外部流动可以在径向向外的方向上偏转少量。在一些实施例中,偏转可以在径向向内的方向上。可以以其中与实施例相对于流体的运动相关联的总阻力被最小化的方式配置导管装置。除了将导管装置的外表面配置成减小由所述表面施加在外部流动上的扰动之外,导管装置的上游流管715和下游流管716的尺寸和形状也被配置成在理想化的无摩擦的情形下不改变。换言之,由导管装置引起的任何扰动都不会以流管的形状或尺寸的变化的形式传递到外部流动,从而导致与外部流动中的导管装置相关联的波阻力可忽略不计。在导管装置上游的流管715的均匀的圆柱形形状是由于导管装置在流体中比波速行进得快,以及导管装置的几何形状被配置为防止在标称操作期间形成弓形冲击的结果。
[0316]
如在先前的实例中所讨论的,在导管装置700的入口处施加于内部流动的扰动的至少一部分,即第一收缩部705和第一膨胀部706中的流体的压缩,被配置成包含在导管装置700内,诸如具有基本上恒定的横截面积的区域707或第二膨胀部708,直到它们在出口处被抵消,即流体在第二收缩部710和第三膨胀部711中的膨胀。为了简单起见,当假定无粘流动时,第一收缩部705内的压缩被配置成是等熵的和绝热的。这可以通过逐渐压缩流过第一收缩部705的流体来实现。由第一收缩部705内的内表面718的元件产生的各个压缩特性与沿周向相邻的元件的相应特性合并,然后由沿流向下游的相邻元件产生的压缩特性可以与上游特性合并或结合或赶上以形成冲击波。在此类实施例中,第一收缩部705可以被视为包含无限弱压缩冲击波的扇形。在其它实施例中,可以在第一收缩部705内形成有限尺寸的冲击波。例如,这可以是第一内表面718在第一开口704处更实际的有限前缘角的结果。当忽略壁摩擦和热传递效应时,也可以假定通过第二收缩部710和第三膨胀部711的膨胀是等熵的和绝热的。在第二开口712和第一开口704处的流体速度在大小和方向上在空间上是均匀的,并且在图22所示的简化的理想情形下等于自由流流速矢量。
[0317]
由于在流体遇到机身装置719之前将流体流速降低到亚音速,因此在简化的示出的实施例中,在导管装置700内不存在由机身装置719产生的冲击波。在其它实施例中,冲击波可以在通道703内形成。例如,这可能是由于局部跨音速流引起的。例如,围绕imsa(诸如图24中的imsa 817)的流体流动可以局部达到超音速。例如,imsa 817可以是跨音速翼型。在另一实例中,冲击波也可以位于第一膨胀部706内,如所提及的。这可以避免由于自由流流动的变化而引起的通过通道703的流动的未开始,从而导致弓形冲击。例如,此类变化可能是由大气中的风引起的。在另一实例中,通道内的流速在整个通道内或在扰动生成装置
附近可以是超音速的。在此类实施例中,冲击波将在通道内形成。这些冲击波的至少一部分可以被配置为抵消,类似于布斯曼双翼飞机中的冲击波。在这些冲击波没有抵消的配置中,与在导管装置的通道内或在根据本发明配置的流体操纵装置附近的扰动生成装置相关联的波阻力,与扰动生成装置和流体操纵装置相关联的组合波阻力然而可以低于与等效扰动生成装置相关联的波阻力,对于该等效扰动生成装置,没有通过根据本发明配置的流体操纵装置来改变流体流动。通过流体操纵装置相对于自由流流动减小所述扰动生成装置的局部自由流流动即使在局部自由流流动仍然是超音速的情况下也可以减小扰动生成装置的波阻力。
[0318]
应当注意,诸如机身719的主体以超音速速度通过诸如空气的流体行进将产生冲击波。然而,由于通过导管装置700对流体流动的操纵,可以减小与机身719相关联的波阻力。导管装置700和机身装置719的组合波阻力可以低于单独的机身719的理论波阻力,即在“参考情形”中,而不被包含或嵌入在根据本发明配置的流体操纵装置(诸如导管装置700)中。在其它实施例中,如图24所示,可以将不同类型的扰动生成装置定位在机身装置719的位置处,即代替机身装置719。在一些实施例中,所述组合装置的总阻力可以低于扰动生成装置的理论总阻力或仅在流体中行进的合适等效量,即在参考情形下。例如,波阻力的减小幅度可以大于与附加导管装置相关联的粘性阻力的增大幅度。在其它实施例中,总阻力可以大于参考情形中的总阻力。例如,这可以归因于与导管装置和机身装置组合在一起的增加或增大的湿润面积相关联的增大的粘性阻力。在一些此类实施例中,从与由扰动生成装置产生的波相关联的噪声的减小中获得的益处仍然可以抵消与总阻力的增大相关联的任何成本增加。应当注意,通道703内的流体流速的减小还可以有助于减小导管装置700的粘性阻力。
[0319]
导管装置700的目的可以被视为部分地是在任意扰动生成装置(在这种情况下,其是机身装置719)附近的可压缩流体的减速和压力增大,以便减小与扰动生成装置相关联的波阻力。扰动生成装置还可以包含例如螺旋桨、涡轮风扇发动机的风扇、机翼、水平或垂直控制表面,或imca的类型或imsa的类型。
[0320]
在图22中,机身装置719被示为连接到导管装置700但容易与导管装置700区分的结构。在其它实施例中,机身可以以将机身包含在导管装置700的内表面718和外表面717内的方式嵌入在导管装置700内。在一些此类实施例中,类似于第一隔室730或第二隔室732,机身以环形、圆柱形的方式配置。换言之,通道703可被配置成穿过机身的中心,而机身的外表面与导管装置700的外表面717相同。在其它实施例中,如图22所示,机身不需要完全包围通道703,并且通道703不需要完全包围机身。例如,通道可以具有圆形的沿流向的横截面,其一部分由导管装置的机身部分界定,而其另一部分由导管装置的外壁界定。代替横截面为环形,机身在沿流向横截面中可以为半圆形或半环形。机身的周向范围或机身围绕圆柱形导管装置的中心轴线所成的角度不必如在环形或圆形情况下那样为360度,而可以为例如300度、200度、100度或60度。换言之,机身可被配置成连续的体积,即不完全包围通道703的体积,并且通道可以是圆形或半圆形形状。应当注意,与诸如图22所示的环形通道的环形通道相比,具有闭合形状(诸如闭合的圆形横截面形状)的通道可用于减小导管装置的润湿面积。
[0321]
图24是本发明的另一实施例的剖视图。图24中所示的实施例的一些特征以及该实
施例的一些操作原理与其它附图所描述的特征和操作原理具有相似之处,因此将不在图24的上下文中进行相同的详细描述,反之亦然。
[0322]
应当注意,包含在内表面816和外表面815内的装置不必是固体材料,而是可以包含开放空间,以免不必要地增加导管装置800的质量或成本。例如,导管装置800可以包含类似于图22中所示的第一隔室730或第二隔室732的隔室。
[0323]
导管装置800包围imsa 817。在所示的实施例中,导管装置800在沿x轴观察时的横截面为圆形,并且围绕平行于x轴的轴轴向对称。导管装置800可以被视为是imca。导管装置800包括外表面815和具有位于第一开口804和第二开口810之间的内表面816的通道803,其中该通道可以包括第一收缩部805、第一膨胀部806、在x方向上观察时通道803的基本上恒定的横截面积807的区域、第二收缩部808和第二膨胀部809。应当注意,术语“收缩部”和“膨胀部”是指轴向对称通道的半径的大小。
[0324]
在一些实施例中,通道803的横截面积为椭圆形或矩形形状。在一些此类实施例中,在标称操作期间,形状的长轴平行于z轴。此类导管装置可被配置成容纳或包围并操纵具有长轴的机翼的局部自由流流动,该长轴也平行于z轴。
[0325]
导管装置800可以由散装材料801构成,其可以包括诸如铝、钢或钛的金属合金。在一些实施例中,散装材料801包括复合材料,例如碳纤维或玻璃纤维。
[0326]
imsa 817可以形成为机翼的形状。图24中的剖视图示出了具有后缘819和外表面820的imsa 817的翼型轮廓。imsa 817可以通过支撑杆824刚性地连接到导管装置。imsa 817的停滞流线,即入射在imsa 817右翼尖的前缘停滞点的流线和始于imsa 817的右翼尖的后缘停滞点的流线由虚线841指示。imsa 817的提升矢量具有平行于y轴的基本分量。应当注意,为清楚起见,以放大的方式示出了机翼817的形状和尺寸,而不是比例表示或实际机翼。
[0327]
如先前所定义的,本发明的实施例至少部分地被流体包围。在图23中,流体是可压缩的。例如,流体可以是诸如空气的气体。
[0328]
在图23中所示的操作条件可以包括作为标称的水平巡航操作条件。在所示的简化情形中,相对于导管装置800的质心的自由流流动在时间上是恒定的,并且在大小和方向上在空间上是均匀的,其中方向平行于x轴。在所示的操作条件下,相对于导管装置800的自由流流速大小大于流体中的声速。由于在这种情形下假定风速可忽略不计,因此这相当于导管装置700相对于流体以比惯性参考系中静止的流体中的声速更快的速度移动。在图23中,相对于导管装置800的自由流流速与x轴对准并平行于x轴,即从页面的左侧到页面的右侧。
[0329]
虚线813和814指示停滞流线,其入射在导管装置800的前缘上或始于导管装置800的后缘。因此,流线813和814是流表面或流管的一部分,流表面或流管将围绕导管装置800流动的流体与在导管装置800的通道803中流动的流体分离。在该实施例中,当沿x方向观察时,流管是圆形的。
[0330]
导管装置800上游的流体(诸如在工位834处)相对于导管装置800的移动速度快于图23所示配置中流体中的声速。通道803的第一收缩部805和第一膨胀部806被配置成在正x方向上压缩流过通道803的流体。第一喉部被定义为通道803的部分,当沿x方向观察时,在第一收缩部805和第一膨胀部806之间具有通道803的最小横截面积。流体相对于第一喉部(即工位835)处的导管装置800的平均速度大约等于该位置处的流体内的声速。在该实施例
中,在上游,诸如在工位834,平均相对速度大于声速,而在下游,诸如在工位837,平均相对速度小于流体中的声速。在所示的实施例中,当忽略摩擦时,通过通道803的流动基本上是绝热的和等熵的。在其它实施例中,在第一喉部和工位837之间可以存在冲击波。换言之,第一喉咙下游的流体的相对流速可以比流体内的声速快,其中在整个冲击波中,相对流速降低至慢于声速的速度,从而在工位837处产生慢于声速的相对流速,如在其中第一喉部处存在无限弱的冲击的理想情形下。
[0331]
通道803的第二收缩部808和第二膨胀部809两者均被配置成在正x方向上膨胀流过通道803的流体。第二喉部被定义为通道803的部分,当沿x方向观察时,在第二收缩部808和第二膨胀部809之间具有通道803的最小横截面积。流体相对于第二喉部(即工位839)处的导管装置800的平均速度大约等于该位置处的流体内的声速。在该实施例中,上游,诸如在工位837处,平均相对速度小于声速,而下游,诸如在工位840处,平均相对速度大于流体内的声速。
[0332]
导管装置800被配置成使扰动生成装置(在这种情况下,其可以被视为是imsa 817)附近的流体流动减速,使得imsa 817的局部自由流流动小于自由流流速大小。作为导管装置的结果,与参考情形相比,与imsa 817相关联的波阻力得以减小,其中imsa 817或等效的imsa或提升装置的局部自由流流动基本上等于自由流流动。应当注意,局部自由流流动仍然可以比所述流体内的波速更快。在此类实施例中,所得的波阻力大于零,但减小了少量。在所示的实施例中,与自由流流动相比,局部自由流流动的减小足够大,使得借助于适当配置的导管装置的流体操纵,imsa 817的局部自由流的大小小于imsa 817上流体的声速。在此类实施例中,所产生的波阻力可以大大减小。在参考情形中,imsa 817或等效的imsa在标称操作期间相对于周围流体的行进速度快于声速,因为局部自由流流动比imsa 817位置处的声速大。因此,imsa 817或等效的imsa将与参考情形中的波阻力相关联。例如,参考情形中的等效imsa可被配置成产生与imsa 817相同的升力,且具有相同的平面面积和/或几何形状。正是这种波阻力与扰动生成装置相关联,该波阻力可以通过根据本发明配置的流体操纵装置来减小。
[0333]
应当注意,本发明的原理还可以用于减小与跨音速流动相关联的波阻力。换言之,自由流流速大小可以小于自由流中的声速,并且可以根据本发明配置流体操纵装置以减小imsa、imca或其它扰动生成装置的局部自由流流速,其大小小于自由流流速大小,使得与扰动生成装置和流体操纵装置相关联的组合波阻力可以低于与现有技术的等效扰动生成装置相关联的波阻力。后一波阻力例如可以是与参考情形中的等效扰动生成装置相关联的波阻力,其中局部自由流流速大小基本上等于自由流流速大小。
[0334]
如所提及的,对于图22所示的实施例,参考情形可以是机身装置719单独以与导管装置700相同的自由流速度行进的情形。对于图23所示的实施例,参考情形可以是imsa 817单独以与导管装置800相同的自由流速度行进的情形。导管装置800的另一参考情形可以是理论超音速飞机以与导管装置800相同的自由流速度行进的情形,其中飞机的重量等于imsa817的升力,并且飞机的几何形状(诸如飞机的长度或机身的体积)与导管装置800的几何形状共享共同特征,诸如内部隔室的长度或体积。
[0335]
导管装置800被配置成以与现有技术中的流体操纵装置相比减小与导管装置800相关联的波阻力的方式来减小扰动生成装置(诸如imsa 817)附近的局部自由流流动。这可
以通过如下方式配置流体操纵装置来实现,即如所提及的,仅对导管装置800外部的外部流动施加可忽略的或较小的扰动,以及对进入导管装置800的内部流动的逐渐压缩和减速,通过导管装置的外壁来遏制压力的增大,以及对从导管装置800流出的内部流动的逐渐膨胀和加速。应当注意,与内部流动的减速相关联的压力增大的遏制用于防止或减轻由导管装置对内部流动施加的扰动被传递或转移到外部流动。压缩期间施加在内部流动上的扰动被配置为在膨胀期间或在离开通道之前至少部分地被消除。
[0336]
应当注意,通常,本发明的实施例不需要包含导管装置。其它实施例可以包含被配置成执行导管装置800的前述功能的至少一部分的流体操纵装置。本发明的实施例包含一种流体操纵装置,其被配置成减小指定扰动生成装置的局部自由流流动,其中所产生的局部自由流流动可以大于或小于声速,并且其中扰动生成装置可以是imsa或imca,诸如机翼、螺旋桨、操纵面或机身。流体操纵装置还被配置成在干扰生成装置附近人为地遏制压力增大。这可以减小干扰生成装置的波阻力,并且可以减轻与流体操纵装置相关联的波阻力。
[0337]
例如,流体操纵装置可被配置成在指定扰动生成装置附近将每单位质量的体力施加到流体上。每单位质量的该体力的大小和方向可被配置成使扰动生成装置上游的流体减速、抑制或限制在扰动生成装置附近产生的压力增大,并使扰动生成装置下游的流体加速。回想一下,在流体是诸如水的液体的情况下,相反,可以通过所述流体操纵装置在扰动生成装置的上游加速流动和下游减速流动。在扰动生成装置附近,可以认为该流动免受高压“外部”流动的侵害,即可以认为外部流动是受约束或抑制的。应当注意,在此类实施例中,不需要通过流体操纵装置的通道。相反,可以在流体操纵装置外部生成每单位质量生成场的体力,其中在扰动生成装置附近通过的流线被称为“内部流动”,而其余流动被称为“外部流动”,尽管这两种流动都可以在流体操纵装置的外部。
[0338]
每单位质量生成装置和方法中的体力有多种,在本领域中是已知的。例如,扰动生成装置上游的流体可以在流体操纵装置的上游部分中被电离,并且随后经受电场,该电场被配置成在流体操纵装置的下游部分再次去离子或中和之前,在扰动生成装置附近减速、限制和加速电离流体。替代地或同时地,可以使用磁场。在一些实施例中,流体也可以被电极化或磁极化。
[0339]
体力可以由势场梯度的存在而产生。一个此类实例是由电位梯度产生的力。例如,流体的元素可以被配置成带电的。在流体的上下文中,术语“元素”是指流体的组成部分,例如分子。在气体的情况下,分子可以例如被正电或负电离。通过施加电场,可以通过流体操纵装置将每单位质量的体力施加到流体的带电元素上。
[0340]
对于其它实施例,使用、获取或产生带有移动电荷的流体可能是不可能或不便的。在这种情况下,流体的元素可以通过施加电场来极化,或者这些元素可以已经具有本征极化,如在极性分子(诸如水)的情况下。当放置在电场梯度中时,这些极化的元素会经受体力。应当注意,除其它参数外,所述力的大小取决于极化轴相对于电场的定向。因此,电场可被配置成在流体中的极性元素上以及在必要时在流体中的极化元素上生成每单位质量的体力。可以以本领域中已知的多种方式来施加电场。
[0341]
磁性也可以用来生成体力。流体可以包含抗磁性、顺磁性或铁磁性元素。磁化后,流体中的各个元素可能形成磁偶极子,或者这些元素可能已经具有本征磁偶极子,诸如电子。当这些磁偶极子以非零的卷曲度或梯度放置在磁场中时,它们会经受体力。应当注意,
除其它参数外,体力的大小是磁偶极子相对于局部磁场的定向的函数。因此,外部磁场可被配置成在流体中的磁化元素上生成每单位质量的体力,并且如果需要的话对流体中的磁化元素进行磁化。除本领域已知的其它方法外,磁场还可以由其它至少瞬间磁化的铁磁体生成,或者由流过电磁线的电流生成。
[0342]
在图23中,与imsa 817释放的涡度相比,导管装置以其中导管装置800仅释放少量涡度的方式配置。这部分是通过确保imsa 817距内表面816足够远而实现的,使得imsa 817的诱导流速和内表面816处的相关联尾流足够小。应当注意,由导管装置800释放的涡度或超音速外部流内的任何诱导流速都可能在外部流动上引起波阻力。因此,导管装置800足够大可能是有利的,以至于imsa 817的束缚涡度以及imsa 817释放的任何涡度都不会在内表面816处施加理论诱导流速,即诱导局部自由流流速。由于理论约束阻止流体流过内表面816,因此此类理论诱导速度会引起与导管装置800相关联的理论边界涡流,或由导管装置800引起的涡流释放。在导管装置800的尾缘处,即在第二开口810处,这些释放的涡流会引起冲击波和波阻力。可以通过减小imsa 817的扰动以及导管装置800上imsa 817的尾流的干扰来减小此波阻力的大小。这可以通过适当配置诸如导管装置800的尺寸的参数来实现,该尺寸可以根据工位837处的直径或横截面积或imsa 817下游的导管装置800的长度进行测量,例如,imsa 817在导管装置800中的位置和尺寸,其中尺寸可以根据翼展弦长或参考面积、imsa 817产生的升力大小以及工位837处的流体特性进行测量,其中这些特性可以指局部自由流流速或密度。应当注意,通过改变imsa 817及其尾流的局部自由流,导管装置800能够并且确实对imsa 817及其尾流施加大量干扰。
[0343]
在第二收缩部808和第二膨胀部809中,imsa 817的涡流片(如流线841所示)与内部流动(即803通道内的整体流)一起在正x方向加速。在所示的实施例中,在第二开口810处,imsa 817的涡流片中的涡流的速度以大于声速的速度在正x方向上移动,如该位置处的内部流动的情况。在第二开口810的下游,imsa 817的涡流片不以比相对于整体流的声速更快的速度移动。因此,涡流片可以从内部流动向外部流动横越而不会在界面处引起冲击波。应当注意,即使在内部流动和外部流动之间存在滑移速度或速度差或速度梯度时,也是如此。
[0344]
在一些实施例中,与imsa 817的涡流片的加速度相关联的波阻力从小于在导管装置800内的横截面积基本上恒定的区域内相对于导管装置800的声速开始的速度到大于相对于工位840处的导管装置800的声速的速度,其在一些实施例中当与现有技术中的等效imsa相关联的波阻力相比时可以很小或可忽略不计。这是由于涡流片的自由涡流的加速以及内部流动的大部分的加速,使得涡流的移动速度不会比周围的流体快。借助于诸如导管装置800的流体操纵装置,imsa 817的给定涡流(束缚的或自由的)被阻止或阻碍在相对于所述涡流源以超音速移动的流体中产生显著的诱导速度或对其施加扰动。第二收缩部808和第二膨胀部809中的流体的逐渐加速可用于减小与imsa 817的涡流片相关联的任何冲击波的强度。
[0345]
图24是在图23所示的位置处在正x方向上观察时的图23所示的实施例的剖视图。
[0346]
示出了流线841。imsa 817的停滞流线,即入射在imsa 817左翼尖的前缘停滞点的流线和始于imsa 817左翼尖的后缘停滞点的流线,由虚线842指示。示出了imsa 817的内表面823。
[0347]
图25是在图24所示的位置处在正x方向上观察时的图23所示的实施例的剖视图。
[0348]
imsa 817的理论释放涡流片在此位置处的横截面由虚线843表示。涡流片的卷起被示意性地表示。
[0349]
图26是在图24所示的位置处在正x方向上观察时的图23所示的实施例的剖视图。
[0350]
imsa 817在工位839处的理论释放涡流片的横截面用虚线844指示。涡流片的卷积进一步发展。
[0351]
图27是在图24所示的位置处在正x方向上观察时的图23所示的实施例的剖视图。
[0352]
imsa 817在该位置处的理论释放涡流片的横截面用虚线845指示。涡流片的卷积进一步发展。
[0353]
虚线846绘示了外表面815在平行于所述剖视图下游的yz平面的平面上的投影。
[0354]
图28是在图24所示的位置处在负x方向上观察时的图23所示的实施例的剖视图。
[0355]
图29是本发明的另一实施例的剖视图。图30中所示的实施例的一些特征以及实施例的一些操作原理与其它附图所描述的特征和操作原理具有相似之处,因此将不在图30的上下文中以相同的细节进行描述,反之亦然。
[0356]
导管装置850包围imsa 892,在一些实施例中,其可以是机翼、上游imsa 908、机身装置869、下游imsa 919和发动机925。
[0357]
在所示的实施例中,发动机925可被描述为涡轮风扇发动机。在一些实施例中,发动机925的驱动轴可以联接至变速箱。在一些磁力实施例中,发动机925可以被描述为涡轮轴发动机。
[0358]
在所示的实施例中,当沿x轴观察时,导管装置850的横截面是圆形的,并且围绕平行于x轴的轴轴向对称。导管装置850可以被视为是imca。导管装置850包含外表面867和具有位于第一开口854和第二开口862之间的内表面868的通道853,其中通道包括第一收缩部855、第一膨胀部856、当在x方向上观察时通道853的横截面积857逐渐增大的区域、第二膨胀部858、第二收缩部860和第三膨胀部861。应当注意,术语“收缩部”和“膨胀部”是指轴向对称通道的半径的大小。
[0359]
机身装置869包含通过虚线875示意性地与剩余机身分离的前缘点870、后缘点871、内表面873、外表面872和机身隔室874。机身装置869通过多个支撑杆刚性地连接至导管装置。在所示的实施例中,诸如定子叶片913的单个定子叶片也可以被视为是支撑杆,反之亦然。在一些实施例中,机身可被配置成例如承载货物、乘客或燃料。
[0360]
导管装置包含在上游颈缩或导管元件951内的第一隔室880和在下游颈缩或导管元件952内的第二隔室882。这些隔室可以实现许多目的。在一些实施例中,它们可以用于存储起落架、燃料或货物。
[0361]
应当注意,通道半径或几何形状可以作为沿x轴的位置的函数以不同的方式改变,或者对于其它实施例或其它操作条件以不同的方式配置。在其它实施例中,当沿x方向观察时,通道853或外表面867的横截面几何形状可以是正方形、矩形或椭圆形。在一些实施例中,通道853的横截面几何形状例如可以在正x方向上从正方形改变为圆形。
[0362]
对于一些实施例,圆形通道853的横截面积可以随时间变化。例如,可以针对不同的操作条件改变工位890处的通道半径。可以根据自由流流速来增大或减小半径。以这种方式,可以改变和控制通过导管853的流动的特性,从而可以在不同的自由流流动条件下应用
本发明的原理。例如,可以通过控制工位890处的通道853的横截面积来调节第一膨胀部856内的冲击波的存在或位置。可以使用多种方法来改变通道的横截面积作为时间的函数。例如,连接到导管装置850的坡道可以液压地延伸到通道中,从而减小通道的横截面积。在另一实例中,位于通道853内的尖钉可沿通道的长度,即沿x方向轴向地朝向或远离通道的收缩部移动,从而分别减小或增大通道853的环形横截面积。
[0363]
类似地,可以改变工位885处的通道853的横截面积,以确保通道853内以及通道853上游和下游的所需流量剖面。
[0364]
导管装置850可以由散装材料851构成,其可以包括诸如铝、钢或钛的金属合金。在一些实施例中,散装材料851包括复合材料,例如碳纤维或玻璃纤维。
[0365]
在一些实施例中,imsa 892可以是机翼。图29中的剖视图示出了具有后缘895、内表面899和外表面896的imsa 892的翼型剖面893。imsa 892通过支撑杆900刚性地连接到导管装置。imsa 892的停滞流线,即入射在imsa 892右翼尖的前缘停滞点的流线和始于imsa 892右翼尖端的后缘停滞点的流线,由虚线901指示。在图29所示的超音速、标称、恒定速度、水平巡航配置期间,imsa 892被配置成生成升力,如升力矢量941所示,其具有平行于y轴的实质性分量。
[0366]
上游imsa 908包含螺旋桨或具有风扇叶片或螺旋桨叶片(诸如叶片911)的风扇盘,其安装到具有前缘点870的中心毂909上。定子叶片,诸如定子叶片913,位于螺旋桨的下游。在其它实施例中,没有专用的定子叶片,上游imsa 908仅由单个风扇盘或螺旋桨组成。在另一实例中,上游imsa可以由两个同轴和反向旋转的螺旋桨组成。在所示的实施例中,螺旋桨叶片和定子叶片被配置成能够围绕其长轴旋转。换言之,可以针对上游imsa 908的定子叶片和转子叶片来调节叶片桨距角。在图29所示的超音速、标称、水平巡航配置期间,上游imsa 908的风扇叶片和定子叶片呈羽状,即处于低阻力配置。对于一些实施例,在该配置中,上游imsa 908的转子是静止的,即不相对于导管装置850旋转。在其它实施例中,上游imsa 908的转子可以在该配置中旋转。
[0367]
下游的imsa 919包含螺旋桨或具有风扇叶片或螺旋桨叶片(诸如叶片922)的风扇盘,其安装在中心轴上。定子叶片,诸如定子叶片924,位于螺旋桨的下游。在其它实施例中,没有专用的定子叶片,下游的imsa 919仅由单个风扇盘或螺旋桨组成。在另一实例中,下游imsa可以由两个同轴和反向旋转的螺旋桨组成。在所示的实施例中,下游imsa 919的转子沿与上游imsa 908的转子相同的方向旋转。在其它实施例中,下游imsa 919的旋转方向可以与上游imsa 908的旋转方向相反。这可用于减小由于作用在上游和下游imsa两者上的阻力而围绕平行于上游和下游imsa的旋转轴的轴作用在导管装置850上的扭矩,如在上游imsa 908的上下文中所解释的,下游imsa 919的螺旋桨叶片和定子叶片被配置成能够围绕其长轴旋转。换言之,可以为下游imsa 919的定子叶片和转子叶片调节叶片俯仰角。在图29所示的超音速、标称、水平巡航配置期间,下游imsa 919的风扇叶片和定子叶片呈羽状,即处于低阻力配置。对于一些实施例,在该配置中,下游imsa 919的转子是静止的,即相对于导管装置850不旋转。在其它实施例中,下游imsa 919的转子可以在该配置中旋转。
[0368]
在一些实施例中,发动机925可以是在机舱931内具有压缩机928、燃烧室940和涡轮932的喷气发动机。涡轮932的第一级由具有转子叶片(诸如转子叶片934)的转子盘和具有定子叶片(诸如定子叶片935)的定子组成。涡轮932的第二级由具有转子叶片(诸如转子
叶片936)的转子盘和具有定子叶片(诸如定子叶片937)的定子组成。发动机925具有双阀芯结构,涡轮932的第一级转子盘驱动第一阀芯926,其驱动压缩机928的转子盘。压缩机928可以具有三级,其各自由具有转子叶片(诸如第三级的转子叶片929)的转子盘以及具有定子叶片(诸如第三级的定子叶片930)的定子组成。涡轮932的第二级的转子盘驱动第二阀芯,其例如经由驱动轴927、驱动轴915和驱动轴916驱动上游imsa 908和下游imsa 919两者的转子。整流罩933被配置成通过减小或避免在涡轮932的出口处的流动分离来减小发动机925的阻力。指示了整流罩933的尾随点871。
[0369]
在所示的实施例中,入口坡道或门938可被配置成防止大部分内部流动进入发动机925。入口门938可被配置成关闭发动机925的入口。出口门939可被配置成向机舱931提供空气动力学或流体动力学整流罩。在图29所示的超音速、标称、水平巡航配置期间,入口门938和出口门939以完全关闭的配置示出。在此操作条件期间,推力是由通道853内的火焰稳定器(诸如火焰稳定器724)喷射和燃烧燃料提供的。在该操作模式期间,可以认为发动机925已关闭,即完全关闭电源或处于不提供大量动力的状态。在其它实施例中,发动机925可以在超音速、标称、水平巡航期间保持开启。例如,发动机925可以驱动发电机,以便为飞行器850上的辅助系统提供电力。该功率可用于给电池充电,或者被电气设备(诸如飞行计算机或空调机组)消耗。入口门938和出口门939在图30和图31中以完全打开的配置示出。在这种配置中,流过通道853的流体的一部分可以被发动机925吸收或流过发动机925,例如,发动机925可以通过燃料的燃烧来产生功率。
[0370]
如所提及的,由发动机925生成的功率经由传动系被传输到上游imsa 908和下游imsa919。在一些实施例中,传动系可以包含例如离合器、驱动轴、齿轮或齿轮箱。在其它实施例中,由发动机925生成的功率可以电传递到上游imsa 908和下游imsa 919。发动机925可以为发电机供电,所产生的电力的至少一部分可以经由电导体被传递到电动马达,其中电动马达可被配置成向上游imsa 908和/或下游imsa 919供电。所述电力的一部分也可以用于为导管装置850的辅助电气系统供电。在一些实施例中,下游imsa 919的转子盘可以连接到驱动轴927,如图29所示,驱动轴927又可被配置成驱动发电机,发电机的电力可以经由围绕机身舱室874的导电体传递到驱动上游imsa的转子盘的电动机908。
[0371]
通过万向节将动力从驱动轴927机械地传输到上游imsa 908的传动系引导到围绕机身舱室874。在导管装置850中,万向节是等速节或cv节,诸如将驱动轴915连接到驱动轴916的cv节907。
[0372]
在所示的实施例中,下游imsa 919的定子叶片被配置成能够将燃料喷射到相邻的流体流动中,以及在所述燃料的燃烧期间稳定火焰。因此,可以将imsa 919的定子视为火焰稳定器。在图29所示的超音速、标称、水平巡航配置期间,火焰稳定器被配置成将燃料注入通道853并且在所述燃料的燃烧期间稳定火焰。在此类实施例中以及在该操作模式期间,通道853可以以与冲压喷气发动机相同的方式操作。由流体在导管装置850上施加的推力由推力矢量(诸如推力矢量943)示意性表示。应当注意,推力是作用在导管装置850上的流体压力的结果。换言之,推力来自作用在导管装置850的湿润表面上的压力的积分。结果,工位891处的内部流动的流速大小大于自由流流速大小,即工位884处的内部流动的流速大小。
[0373]
通过调节下游和/或上游imsa的桨距角或定子叶片相对于流体的定向,可以消除由上游和下游imsa的组合在导管装置850的其余部分上施加的任何剩余扭矩。在一些实施
例中,定子叶片还可以用于导管装置850的滚动、俯仰和偏航控制。在其它实施例中,类似于imsa892的专用imsa可以位于通道853的区域内,在该区域中流体相对于导管装置以亚音速流动,其中专用imsa被配置成维持滚动、俯仰和/或偏航控制。在又一实施例中,操纵面可以位于通道853内流体相对于导管装置以超音速移动的区域中。在一些此类实施例中,操纵面可以位于导管装置的后缘处,即第二开口862处。俯仰和偏航控制可以通过推力矢量实现,例如,其中推力是由内部流动的加速度产生的。在一些实施例中,诸如垂直或水平尾翼的尾翼面可以安装在外表面867上,并且被配置成与外部流动(即圆柱形流管865或866外部的流动)相互作用。
[0374]
如先前所定义的,本发明的实施例至少部分地被流体包围。在图29中,流体是可压缩的。例如,流体可以是诸如空气的气体。
[0375]
在一些实施例中,图29中示出的操作条件可以是标称水平巡航操作条件。在所示的简化情形中,相对于导管装置850的质心的自由流流动在时间上是恒定的,并且在大小和方向上在空间上是均匀的,其中方向平行于x轴。在所示的操纵条件下,相对于导管装置850的自由流流速大小大于流体中的声速。由于在这种情况下假定风速可忽略不计,因此这相当于导管装置850相对于流体以比惯性参考系中静止的流体中的声速更快的速度移动。在图29中,如箭头944所示,相对于导管装置850的自由流流速与x轴对准并平行于x轴,即从页面的左侧到页面的右侧。
[0376]
虚线865和866指示停滞流线,其入射在导管装置850的前缘上或始于导管装置850的后缘。因此,流线865和866是流表面或流管的一部分,流表面或流管将围绕导管装置850流动的流体与在导管装置850的通道853中流动的流体分离。在该实施例中,当沿x方向观察时,流管是圆形的。
[0377]
导管装置850上游的流体(诸如在工位884处)相对于导管装置850的移动速度快于图29所示配置中流体中的声速。通道853的第一收缩部855和第一膨胀部856被配置成在正x方向上压缩流过通道853的流体。第一喉部被定义为通道853的部分,当沿x方向观察时,在第一收缩部855和第一膨胀部856之间具有通道853的最小横截面积。流体相对于第一喉部(即工位885)处的导管装置850的平均速度大约等于该位置处的流体内的声速。在该实施例中,在上游,诸如在工位884,平均相对速度大于声速,而在下游,诸如在工位887、888或889,平均相对速度小于流体中的声速。在所示的实施例中,当忽略摩擦时,通过通道853的流动基本上是绝热的和等熵的。在其它实施例中,在第一喉部和工位887之间可以存在冲击波。换言之,紧靠第一喉部下游的流体的相对流速可以比流体中的声速快,其中在整个冲击波中,相对流速降低至慢于声速的速度,从而在工位887处产生慢于声速的相对流速,如在其中第一喉部处存在无限弱的冲击的理想情形下。在优选实施例中,此类冲击波被配置成位于上游imsa 908的上游。
[0378]
通道853的第二收缩部860和第三膨胀部861两者均配置成在正x方向上膨胀流过通道853的流体。第二喉部被定义为通道853的部分,当沿x方向观察时,在第二收缩部860和第三膨胀部861之间具有通道853的最小横截面面积。流体相对于第二喉部(即工位890)处的导管装置850的平均速度大约等于该位置处的流体内的声速。在该实施例中,在上游,诸如在工位887处,平均相对速度小于声速,而在下游,诸如在工位891处,平均相对速度大于流体内的声速。
[0379]
在图29所示的超音速、标称、水平巡航配置期间,导管装置850被配置成减小扰动生成装置(诸如上游imsa 908、机身装置869、imsa 892、下游imsa 919、燃料喷射器和火焰稳定器924或发动机925)的局部自由流流动。导管装置850还被配置成在不产生其自身的不必要的大波阻力的情况下实现局部自由流流动的所述减小。这可以通过如前所述配置导管装置来实现。例如,导管装置850的圆形外表面867在下游方向上的直径变化可被配置为较小且渐进的。在内部流动减速期间由导管装置对内部流动施加的扰动可以通过导管装置的外壁与外部流动隔离,并且在内部流动通过第二开口862流出之前,可以消除对内部流动的所述扰动的至少一部分。任何涡流释放,诸如imsa 892或上游imsa 908产生的涡流,都可被配置成在导管装置850内以与自由流流速相比降低的局部自由流流速发生,使得与释放过程相关联的波阻力与参考情形相比减小或可忽略不计。如所提及的,可以将相同的原理应用于其它扰动,诸如束缚涡流或imca、发动机或燃料燃烧。导管装置850(诸如导管装置850的内表面868)上的导管装置内(诸如工位885和890之间)的束缚或自由涡流所施加的干扰或局部自由流流速改变是低的,使得导管装置850不会产生不必要的大波阻力,其中相关联的波可以在内部流动或外部流动中。这可以通过确保通道853的直径相对于涡流的强度和位置足够大来实现。束缚的或自由的涡流丝的强度以及到导管装置的内表面或外表面的距离是确定所述干扰强度的一些参数。应当注意,尽管不是所有的扰动都携带或释放涡流,诸如由燃料燃烧产生的扰动,但是本发明的原理也适用于此类扰动。
[0380]
在超音速、标称、水平巡航期间,所示导管装置850的大部分重量由imsa 892产生的升力941承载,而大部分推力由通道853产生,通道853可被配置为冲压喷气发动机。例如,导管装置850可以被描述为超音速飞机。在图29中,导管装置850相对于静止自由流流体以超音速在负x方向上平行于x轴移动。
[0381]
图30是图29所示的用于不同操作模式的实施例的剖视图。在图30中,导管装置850相对于静止自由流流体以亚音速在负x方向上平行于x轴移动。自由流流动相对于导管装置850的方向由箭头950指示。在该配置中,作用在导管装置850上的升力945承载导管装置850的一部分重量。导管装置850的纵向对称轴围绕z轴在负方向上旋转。导管装置850产生的攻角导致内部流动和外部流动在负y方向上偏转,从而产生作用在导管装置850上的升力和阻力。在该操作模式期间,导管装置850可以被视为是闭合翼或环形翼。
[0382]
为了减小imsa 892与下游imsa 919之间的干扰,imsa 892在此操作模式期间进行了羽化处理。干扰会导致下游imsa 919处的流场变形,从而可能导致不必要的阻力、噪声和振动。为此,以在简化、无摩擦的情形下,imsa 892不会释放任何涡流的方式改变imsa 892的形状。在一些实施例中,imsa 892可以变形为使得imsa 892的每个翼型部分的外倾角和迎角为零。在其它实施例中,imsa 892可以缩回到整流罩中,或者与内表面(诸如内表面868或机身外表面872)齐平安装。这可以减小导管装置850的润湿面积,同时还可以最小化或减小imsa 892与下游imsa 919之间的任何干扰。
[0383]
上游imsa 908被配置成产生指向上游方向的推力,如推力矢量946所示,下游imsa 919被配置成产生指向下游方向的推力,如推力矢量949所示。这可以增大通过通道853的质量流率,并减小与产生升力和推力相关联的诱导阻力。应当注意,上游imsa 908和下游imsa919产生指向上游方向的净推力,这抵消了作用在导管装置850上的阻力,并有助于导管装置850的净升力。
[0384]
上游imsa 908消耗的功率由下游imsa 919从内部流动以及发动机925提取的功率提供。
[0385]
在图30中,在亚音速、标称、水平巡航期间,除了在发动机925的燃烧室940内之外,没有燃料流经由火焰稳定器进入内部流动,也没有燃料在内部流动中燃烧。在其它操作模式中,类似于加力燃烧器的操作,火焰稳定器可以在通道853中喷射和燃烧燃料。类似地,也可以在发动机925中涡轮机932的下游直接喷射燃料并进行燃烧。
[0386]
虚线959和960指示停滞流线,其入射在导管装置850的前缘上或始于导管装置850的后缘。因此,流线959和960是流表面或流管的一部分,流表面或流管将外部流动(即围绕导管装置850流动的流体)与内部流动(即在通道853流动的流体)分离。在该实施例中,当沿x方向观察时,流管是圆形的。
[0387]
在图30所示的操作模式下,随着自由流速度的增大,下游imsa 919的推力大小可以减小。在图30和图31所示的操作模式期间,下游imsa 919的目的是增大通过通道853的质量流率。随着自由流速度大小的增大,仅在较小程度上需要下游imsa 919的服务。因此,可以减小下游imsa 919的推力的大小。取决于净推力要求,上游imsa 908的推力可以随着自由流速度的增大而减小或增大。在低自由流流速下,上游imsa 908产生的推力可能会受到发动机925的结构约束或功率限制的限制。随着自由流流速的增大,或在上述低自由流流速下,上游908产生的推力也可通过上游imsa 908的转子叶片的波阻力、压缩阻力或噪声的增大而受到限制。波阻力可由上游imsa 908的转子或风扇的尖端速度相对于超过该位置处的声速的流体产生。上游908的转子叶片的部分也可能在相对于周围流体的高速度下遇到可压缩性阻力。随着上游imsa 908的推力减小,下游imsa 919的推力的大小减小,以满足给定的净推力要求。在足够大的自由流流速下,下游imsa 919的推力大小是如此之小,以至于在imsa 919的下游羽化更为有利。为此,下游的imsa 919可以通过离合器从传动系统上分离并进行羽化,而上游的imsa 908继续提供推力。在该配置中,上游imsa 908和发动机925可被视为作为常规涡轮风扇发动机运行,风扇由上游imsa 908表示,而核心由发动机925表示。
[0388]
随着速度进一步增大,上游imsa 919的转子的推力和转速可以减小,以避免或减小与上游imsa 919的转子叶片相关联的波阻力和/或可压缩性阻力。与前所述,上游imsa 908和发动机925可被视为常规涡轮风扇发动机,尽管风扇(即上游imsa 919)产生的推力百分比降低。所需推力的其余部分可以通过通过发动机925的流体的加速来提供,该发动机本身可被视为可以用作涡轮喷气发动机。
[0389]
当自由流流速接近并超过1马赫时,发动机925的加力燃烧室可以任选地接合,以补偿1马赫发动机附近上游imsa 908的推力和转速降低,并帮助发动机925满足净推力要求。替代地或同时地,燃料可以由火焰稳定器和燃料喷射器在通道889处在通道853内喷射和燃烧。当速度增大到超过1马赫时,上游imsa 908的局部自由流流速降低,从而允许旋转速率以及上游imsa 908产生的推力再次增大。以足够大的速度,可以减少或完全停止进入发动机925的加力燃烧室或在工位889处的内部流动中的任何燃料,以提高燃料效率。以此类速度,上游的imsa 908和发动机925可被视为是超巡航的涡轮风扇发动机。在一些操作模式期间,不需要发生燃料流的这种减少以帮助导管装置850的加速。随着速度进一步增大,进入发动机925的加力燃烧室或在工位889处的内部流动中的任何燃料流都可以增大。燃料
可以通过火焰稳定器和喷射器(诸如火焰稳定器924)喷射到通道853中并燃烧。通道853的内部流动保持在发动机925外部的部分因此可被视为在这种操作模式下被作为冲压发动机操作。随着速度的进一步增大,上游imsa 908产生的推力可以减小,并且上游imsa 908也可以被羽化,这对应于图29中所示的配置。
[0390]
在前面的描述中,描述了从低亚音速到超音速的加速度。应当注意,在该加速期间与导管装置850相关联的波阻力相对较低。并不是说可以通过其它方式进行这种加速。例如,可以允许在第一开口854的上游形成冲击。该冲击波可以由例如单独的专用冲击体(诸如单独的机身)产生。例如,也可以通过适当减小通道890在工位890或工位885处的通道853的横截面积来产生冲击波。与上述情形相比,这可以减小通过通道853的质量流率,并增大1马赫附近且以超音速的上游imsa 919的转子的推力和旋转速率。但是,这可能会引起波阻力并造成噪声污染。通过通道853的质量流率的降低还可以增大导管装置850的诱导阻力或诱导功率。
[0391]
图31是图29所示的用于不同操作模式的实施例的剖视图。这种操作模式可以描述为恒速爬升。应当注意,在悬停飞行期间导管装置850的配置类似于图31中所示的配置。导管装置850可以描述为能够进行超音速飞行的垂直起降(vtol)飞行器。
[0392]
在图31中,导管装置850相对于静止自由流流体以亚音速在正y方向上平行于y轴移动。相对于导管装置850的自由流流动的方向由箭头958指示。
[0393]
虚线961和962指示停滞流线,其入射在导管装置850的前缘上或始于导管装置850的后缘。因此,流线961和962是流表面或流管的一部分,流表面或流管将外部流动(即围绕导管装置850流动的流体)与内部流动(即在通道853流动的流体)分离。在该实施例中,当沿x方向观察时,流管是圆形的。
[0394]
上游imsa 908被配置成产生指向上游方向的推力,如推力矢量955所示,下游imsa 919被配置成产生指向下游方向的推力,如推力矢量841所示。如所提及的,这可以增大通过通道853的质量流率并减小与推力产生相关联的诱导阻力。应当注意,上游imsa 908和下游imsa 919产生指向上游方向的净推力,该净推力抵消了在匀速爬升期间作用在导管装置850上的牵引阻力和重力。
[0395]
上游imsa 908消耗的功率由下游imsa 919从内部流动以及发动机925提取的功率提供。在该实施例中,所述功率经由包含传动轴(诸如传动轴915)的传动系机械地传递到上游imsa908。
[0396]
在图31中,在亚音速、标称、等速、垂直爬升期间,除了在发动机925的燃烧室940内之外,没有燃料流经由火焰稳定器流入内部流动,也没有燃料在内部流动中燃烧。在其它操作模式中,类似于加力燃烧器的操作,火焰稳定器可以在通道853中喷射和燃烧燃料。类似地,也可以在发动机925中涡轮机932的下游直接喷射燃料并进行燃烧。
[0397]
对于图31所示的操作模式,如图30的上下文中所述,imsa 892被羽化。应当注意,imsa892可以用作操纵面,或者imsa 892的操纵面在imsa 892被羽化的配置期间可以保持活动状态。
[0398]
在着陆期间,导管装置850可以展开起落架,并以类似于图31所示的配置垂直地接近地面。起飞和悬停飞行可以遵循相同的原则。在起飞之后,导管装置850可以从图31所示的操作模式转换到图30所示的操作模式,并且随后转换到图29所示的操作模式。例如,可以
通过与音高控制相同的机制来完成转换。如所提及的,这可以通过例如操纵面或推力矢量进行。
[0399]
在一些实施例中,导管装置850可以包含槽,其允许流体穿过外表面867和内表面868。这些槽可以位于收缩部951的下游,即第一收缩部855的下游和第一膨胀部856的下游,以及上游imsa 908的上游。在一些实施例中,槽还可穿过收缩部951,即穿过第一隔室880的一部分。槽可位于收缩部952的上游,即第二收缩部860的上游和下游imsa 919的下游。在一些实施例中,槽还可穿过收缩部952,即穿过第二隔室882的一部分。槽可以围绕圆柱形或圆形导管装置850周向布置。可以将门或坡道配置成关闭槽或打开槽。例如,这些槽可以类似于hawker siddeley harrier喷气发动机的喷气发动机入口处的槽。在以亚音速操作(诸如亚音速巡航或爬升)期间,槽可以处于打开位置,从而允许流体流入上游imsa 908上游的通道853,并流出下游imsa 919下游的通道853。这可以增大通过上游和下游imsa的流体的质量流率。槽还可用于通过允许流动绕过第一收缩部951或第二收缩部952来减小在第一开口854和/或第二开口862或第一收缩部951或第二收缩部952处的流动分离。这降低了与第一收缩部951或第二收缩部952相关联的束缚涡流的强度,并且可以减小流动分离的量。在较大的自由流流速下,诸如以超音速,可以将槽闭合,从而导致与图29所示的配置类似的配置。
[0400]
在其它实施例中,可以使用或采用通道853内的其它类型的扰动生成装置,或诸如imca、imsa或被配置成增大或降低流体温度的装置的扰动生成装置的不同布置。
[0401]
例如,在其它实施例中,导管装置850的机身可以由发动机925代替,其大部分可位于下游imsa 919的上游而不是下游。此类实施例不需要包括机翼,诸如导管装置850的imsa892,并且传动系可以包含单个直轴,与通过万向节或等速万向节连接的一系列轴相反。例如,此类实施例可被视为是涡轮风扇喷气发动机并且作为涡轮风扇喷气发动机操作。
[0402]
在导管装置850的其它变型中,发动机925也可以被嵌入在机身装置869内。换言之,发动机925可以位于机身装置869的外表面872内或被其包围,并且位于下游imsa 919的上游和上游imsa 908的下游。可以经由从通道853进入机身装置869的导管向发动机925提供空气。导管装置850的其它变型不具有类似于下游imsa 919的下游imsa。在一些实施例中,上游imsa 919的转子可以由至少一个电动机供电,该电动机又可以由例如电池供电。
[0403]
在其它实施例中,飞行器可被配置成能够在起飞、悬停或着陆期间保持基本水平。换言之,如图29所示,在vtol操作期间,长轴可以基本上平行于x轴。为此,以与导管装置850类似的方式配置的实施例与导管装置850相比可以具有以下变化。
[0404]
如前所述,导管装置的外壁可以具有围绕导管装置周向延伸的槽。槽可以位于imsa 908和imsa 919之间,即在工位887附近。应当注意,槽需要足够大以允许足够的流体流过导管装置以支撑导管装置的重量。在其它实施例中,槽也可以被描述为通向导管装置的内部或通道853的门。在一些实施例中,槽仅位于导管装置的顶部上,即位于正y方向上的部分,以防止或减少涡流环状态和发动机925对发动机排气的再吸入。
[0405]
与图30所示的标称亚音速巡航相比,imsas 908和919的旋转方向可以反转。这可以通过变速箱和离合器来实现,变速箱和离合器被配置成能够改变驱动imsa 908和919的驱动轴的旋转方向。如果imsa 908或919由电动机驱动,则电动机的旋转方向可以反转。此外,imsa 908和imsa 919的各个叶片被配置成能够绕其长轴(即径向向外的轴)旋转大约
180度。在其它实施例中,与亚音速、标称水平巡航相比,在vtol操作期间,不需要反转imsa908和imsa 919的转子的旋转方向。例如,imsa 908和imsa 919的转子的翼型可以对称,或者它们可以具有足够小的外倾角或扭曲度,使得推力矢量的方向可以反转而无需改变imsa908和imsa 919的转子的翼型旋转方向。应当注意,每个imsa的定子叶片可用于减轻与以亚音速、标称水平巡航相比推力反向的方式操作转子相关联的任何效率损失。
[0406]
另外,导管的第二开口862之前的部分可以弯曲,并且在某些情况下可以延伸大约90度。类似地,导管的在第一开口654附近的部分可以是弯曲的,并且在某些情况下可以延伸大约90度。导管的在第一开口854附近的部分和导管的在第二开口862附近的部分可以围绕飞行器的侧倾轴线以及飞行器的俯仰轴线旋转。导管装置的这些旋转部分例如可以以与洛克希德f
‑
35(lockheed f
‑
35)的主机下游的旋转导管类似的方式配置。在不同的实施例中,类似于喷气发动机的传统推力反向器中使用的铲斗,可以通过将坡道或铲斗延伸到流动中来提供名义上直的导管的壁的弯曲部分或转向部分,以转向或重定向流动。替代地或同时地,在标称vtol操作期间,可以使用导流叶片来使流体在向下的方向,即负y方向上偏转。可以将这些叶片重新配置成在所需方向上重定向流,例如,相对于导管装置的体积,该方向可以具有两个自由度或“dof”。这些dof可以包含离开导管装置的流动围绕飞行器的俯仰或侧倾轴线的旋转。
[0407]
在标称悬停期间,即在没有扰动的情况下,流动通过工位887附近的槽进入导管装置。该流动随后分叉并向imsa 908或imsa 919移动。在类似于图29所示场景的情形中,imsa908产生的推力指向正x方向,即在该悬停情形的上游方向,并且imsa 919产生的推力指向负x方向,即也在该悬停情形的上游方向。在被imsa 919或imsa 908加速之后,流体从基本上平行于x轴的方向偏转到基本上平行于y轴的方向90度,并指向负y方向。现在,第二开口862和第一开口854的平面不再平行于yz平面,而是在标称悬停期间平行于xz平面。
[0408]
在前述实施例中,在悬停期间消耗的功率由发动机925提供。应当注意,如上所述,本发明的此类实施例能够进行垂直和水平vtol操作。
[0409]
在悬停期间,可以通过imsa 908或imsa 919的定子叶片提供侧倾控制。当净推力矢量的作用线未通过质心时,也可以通过推力矢量提供侧倾控制。可以通过旋转导管装置的第一开口或第二开口的平面(即通过推力矢量)以及对imsa 908或imsa 919的推力大小进行调节来提供俯仰和偏航控制。位置控制可由imsa 908和imsa 919的净推力以及推力矢量提供。回想一下,imsa 908和imsa 919的各个转子叶片可围绕其长轴旋转,以便于在足够的时间内以足够的幅度进行推力控制。
[0410]
在能够进行水平vtol操作的其它实施例中,与上述情形相比,流动方向可以反转。代替通过中央槽(即工位887附近的槽)吸入流体,可以通过一系列中央槽排出流体。imsa 908的推力方向为负x方向,imsa 919的推力方向为正x方向,这与图30所示的亚音速标称水平巡航期间的推力方向相同。这简化了imsa 908和imsa 919的设计。槽可以包含推力矢量装置,其可以用于确保飞行器的稳定性和控制。例如,槽可以包含导向叶片,其被配置成控制离开槽的流体的方向。槽可以沿导管装置的壁彼此足够远地定位,使得可促进足够的俯仰和偏航控制权限。应当注意,此类实施例通过第一开口854和第二开口862吸入流体,这不需要上述名义上的90度弯曲。然而,此类弯曲可以改善飞行器的可控制性。imsa 908和imsa919用于在工位887处增大压力或为流供能,其中流动进入槽的入口,然后沿出口附近
的导向叶片确定的方向通过槽的出口离开,其中导叶例如由飞行控制计算机控制。
[0411]
在这些其它实施例的一些中,发动机925的入口位于imsa 908的下游,但位于内表面868上的槽的入口的上游。以这种方式,发动机在水平vtol操作期间不会重新吸收自身的排气。
[0412]
在这些其它实施例的一些中,槽的入口是周向位于imsa 908和imsa 919之间的通道853的内表面868上的多个开口中的一个,而同一槽的出口位于导管装置的外表面867上的四个位置中的一个。槽的出口经由穿过导管装置壁的管道、通道或导管连接到对应的入口。两个出口可以位于第一隔室880的位置,而两个出口可以位于第二隔室882的位置。对于图29所示的场景,这些出口可以在z方向上彼此偏移,并且通常朝向负y方向。导向叶片可以直接位于出口的上游,其中导向叶片可被配置成控制通过出口流出的流动的流动方向。管道内的阀门可以调节通过给定出口的流体的质量流率。槽的入口和出口可以由门关闭,以确保在非vtol操作期间光滑的外表面867和内表面868。
[0413]
水平vtol操作的好处是,除其它外,病人的舒适运输以及减小靠近地面的风扰动。此类风扰动通常平行于地面定向,并且通过将飞行器转向此类风扰动的主方向,可以减小飞行器由于扰动而受到的阻力。
[0414]
在一些实施例中,燃烧室或火焰稳定器可以位于下游imsa 919的上游和上游imsa 908的下游。燃烧室例如可以位于工位887处。在一些操作模式中,通道853因此可被视为是涡轮喷气发动机,并且作为涡轮喷气发动机操作。附加的火焰稳定器可以位于imsa 919的下游,并作为所述涡轮喷气发动机的后燃器操作。
[0415]
在一些实施例中,发动机925的一部分可以位于通道853的对应于第三膨胀部861的部分中。这可以减小导管装置850的总长度,即导管装置850沿中心轴的范围,这可以减小总的湿润区域和粘性阻力。然而,在一些实施例中,这可以增大波阻力。
[0416]
除非上下文中指明或明确的,术语“或”在本文中等同于“和/或”。
[0417]
本文中描述的实施例和方法仅旨在例示和说明本发明的原理。本发明可以以几种不同的方式来执行,并且不限于在本文中描述或在附图中描绘的实例、实施例、布置、配置或操作方法。这也适用于仅描述或描绘一个实施例的情况。本领域技术人员将能够设计出许多替代实例、实施例、布置、配置或操作方法,尽管本文中未示出或描述,但它们体现了本发明的原理,因此在本发明的精神和范围内。
[0418]
方面
[0419]
此外,通过以下方面描述本发明。
[0420]
方面1.一种用于减小波阻力的系统,所述系统包含:外表面,其被配置成用于接收流体的外部流体流动;通道,其联接到所述外表面并被配置成用于接收所述流体的内部流体流动,所述通道包括流体入口和流体出口,所述通道被配置成操纵所述内部流体流动以减小波阻力;其中所述通道包含:第一流体操纵装置(“fma”),其被配置成接收所述流体入口下游的所述内部流体流动,并且进一步被配置成改变所述通道内的所述流体流动的速度和压力;压力容纳装置(“pca”),其被配置成接收所述第一fma下游的所述内部流体流动;以及第二fma,其被配置成接收所述pca下游和所述流体出口上游的所述内部流体流动,所述第二fma被配置成进一步改变所述内部流体流动的所述速度和压力,其中自由流具有大于所述自由流内的波的波速的自由流速度。
[0421]
方面2.根据方面1所述的系统,其中所述第一fma和/或所述第二fma包含收缩导管。
[0422]
方面3.根据方面1所述的系统,其中所述第一fma和/或所述第二fma包含扩缩导管。
[0423]
方面4.根据方面1所述的系统,其中所述第一fma和/或所述第二fma包含渐扩导管。
[0424]
方面5.根据方面1所述的系统,其中所述第一fma和/或所述第二fma包含螺旋桨或推力生成装置。
[0425]
方面6.根据方面1所述的系统,其中所述第一fma和/或所述第二fma包含体力生成装置。
[0426]
方面7.根据方面1所述的系统,其中所述流体是可压缩的。
[0427]
方面8.根据方面7所述的系统,其中所述流体是包含空气、氮气或二氧化碳的气体。
[0428]
方面9.根据方面7所述的系统,其中所述第一fma被配置成使所述内部流体流动减速并相对于所述自由流增大压力。
[0429]
方面10.根据方面9所述的系统,其中所述第一fma被配置成将所述内部流体流动减速至亚音速流体速度。
[0430]
方面11.根据方面9所述的系统,其中所述第一fma被配置成将所述内部流体流动减速至跨音速速度。
[0431]
方面12.根据方面9所述的系统,其中所述第一fma被配置成将所述内部流体流动减速至较低超音速速度。
[0432]
方面13.根据方面7所述的系统,其中所述第二fma被配置成使所述内部流体流动加速并相对于所述自由流降低压力。
[0433]
方面14.根据方面13所述的系统,其中所述第二fma被配置成将所述内部流体流动加速至基本上等于所述自由流速度的速度。
[0434]
方面15.根据方面13所述的系统,其中所述第二fma被配置成将所述内部流体流动加速至大于所述自由流速度的速度。
[0435]
方面16.根据方面13所述的系统,其中所述第二fma被配置成将所述内部流体流动加速至小于所述自由流速度。
[0436]
方面17.根据方面1所述的系统,其中所述流体基本上是不可压缩的。
[0437]
方面18.根据方面17所述的系统,其中所述流体包含水。
[0438]
方面19.根据方面17所述的系统,其中所述第一fma被配置成使所述内部流体流动加速并相对于所述自由流降低所述内部流体流动的压力,从而与等效的自由流横截面积相比,减小离开所述第一fma并进入所述pca的所述内部流体流动的横截面积。
[0439]
方面20.根据方面19所述的系统,其中所述第一fma被配置成使所述内部流体流动加速,从而减小含有所述系统的飞行器上的包括波阻力的总阻力。
[0440]
方面21.根据方面17所述的系统,其中所述第二fma被配置成使所述内部流体流动减速并相对于自由流增大所述内部流体流动的压力,从而增大离开所述第二fma的所述内部流体流动的横截面积。
[0441]
方面22.根据方面21所述的系统,其中所述第二fma被配置成将所述内部流体流动减速至基本上等于所述自由流速度的速度的速度。
[0442]
方面23.根据方面21所述的系统,其中所述第二fma被配置成将所述内部流体流动减速至大于所述自由流速度的速度。
[0443]
方面24.根据方面21所述的系统,其中所述第二fma被配置成将所述内部流体流动减速至小于所述自由流速度的速度。
[0444]
方面25.根据方面1所述的系统,其中所述pca被配置成维持所述pca内的所述内部流体流动与所述外表面外部的所述自由流之间的压力差。
[0445]
方面26.根据方面25所述的系统,其中所述pca包含具有圆形、矩形、椭圆形或多边形横截面的通道,和/或直边段、弯道、肘关节或转弯。
[0446]
方面27.根据方面1所述的系统,其中所述pca包含机翼,其被配置成生成升力并将净动量传递到所述pca内的所述流体中。
[0447]
方面28.根据方面1所述的系统,其中所述pca包含机身。
[0448]
方面29.根据方面1所述的系统,其中所述pca包含意向性动量承载装置、意向性动量释放装置、涡轮轴发动机、涡轮风扇发动机、涡轮螺旋桨发动机、涡轮喷气发动机、冲压发动机、推力装置、阻力装置、泵喷气机、螺旋桨或加力燃烧室。
[0449]
方面30.根据方面1所述的系统,其中所述pca包含:第一推力装置,其中所述第一推力装置被配置成在标称操作要求期间向局部自由流施加第一诱导速度,所述第一推力装置产生流管,第二推力装置,所述第二推力装置位于所述流管的下游部分,所述第二推力装置被配置成向所述局部自由流施加第二诱导速度,其中在所述第二推力装置的位置处的所述第二诱导速度具有与在所述第二推力装置的位置处的所述第一诱导速度的方向相反的方向上的分量。
[0450]
方面31.根据方面30所述的系统,其中所述第一推力装置或所述第二推力装置包含螺旋桨。
[0451]
方面32.根据方面30所述的系统,其中由一个推力装置提取的功率的至少一部分被引导为另一推力装置的功率。
[0452]
方面33.根据方面1所述的系统,其中所述外表面和内表面之间的体积包含飞行器的至少一部分,其中所述外表面和所述内表面被配置成减小自由流流动中的波阻力的影响。
[0453]
方面34.根据方面33所述的系统,其中所述外表面基本上平行于自由流流动线。
[0454]
方面35.根据方面33所述的系统,其中所述外表面包含环形圆柱体,其中所述第一fma位于所述圆柱体的上游端,并且所述第二fma位于所述圆柱体的下游端。
[0455]
方面36.根据方面35所述的系统,其中所述飞行器的外表面为锥形圆柱体的形状,其中所述圆柱体的半径在下游方向上减小。
[0456]
方面37.根据方面33所述的系统,其中当沿自由流方向观察时,所述外表面的横截面积为圆形、椭圆形、矩形或多边形。
[0457]
方面38.根据方面33所述的系统,其中所述飞行器被配置成垂直起飞并且标称操作而不会引起大量的波阻力。
[0458]
方面39.根据方面33所述的系统,其中所述飞行器被配置成在水平巡航中以亚音
速和/或超音速飞行而不会引起大量的波阻力。
[0459]
方面40.根据方面1所述的系统,其中所述外表面和内表面形成意向性动量承载装置;其中所述系统还包含边界装置;以及其中所述imca相对于所述自由流速度降低所述边界装置的局部自由流速度。
[0460]
方面41.根据方面40所述的装置,其中所述边界装置的所述局部自由流流速的降低是高于所述局部自由流流体内的所述波速的流速的降低。
[0461]
方面42.根据方面40所述的装置,其中所述边界装置的所述局部自由流速度减小至基本上等于所述局部自由流内的所述波速的速度。
[0462]
方面43.根据方面40所述的装置,其中所述边界装置的所述局部自由流速度减小至小于所述局部自由流内的所述波速的速度。
[0463]
方面44.根据方面40所述的装置,其中所述边界装置的所述局部自由流速度减小至在所述边界装置的所述局部自由流内为超音速的速度。
[0464]
方面45.根据方面40所述的装置,其中所述边界装置的所述局部自由流速度减小至在所述边界装置的所述局部自由流内为跨音速的速度。
[0465]
方面46.根据方面40所述的装置,其中所述边界装置的所述局部自由流速度减小至在所述边界装置的所述局部自由流内为亚音速的速度。
[0466]
方面47.根据方面40所述的装置,其中所述边界装置包含机身或船体。
[0467]
方面48.根据方面40所述的装置,其中所述边界装置包含机翼。
[0468]
方面49.根据方面40所述的系统,其中所述边界装置包含第三fma,所述第三fma被配置成向第三fia的远尾流传递净诱导速度,其中所述第三fma的所述远尾流的至少一部分位于所述通道内,并且由于所述通道上游、下游和所述第三fia附近的所述局部自由流速度降低而处于小于所述自由流速度的局部自由流速度。
[0469]
方面50.根据方面49所述的装置,其中由所述第三fia传递到所述第三fma的所述远尾流中的所述诱导速度具有垂直于所述第三fma下游的所述pca内的所述局部自由流流动的非零净分量。
[0470]
方面51.根据方面50所述的装置,其中所述第三fia是机翼并且被配置成在标称水平巡航操作期间生成升力,并且其中所述机翼的所述远尾流的至少一部分位于所述通道内局部自由流流动减小的区域内,并且其中所述机翼的所述远尾流延伸到所述通道的所述出口的外部和下游的所述自由流中。
[0471]
方面52.根据方面51所述的系统,其中翼展小于在所述机翼的位置处的所述通道的有效直径的一半。
[0472]
方面53.根据方面51所述的系统,其中翼展小于在所述机翼的位置处的所述通道的有效直径的四分之一。
[0473]
方面54.根据方面51所述的系统,其中翼展小于在所述机翼的位置处的所述通道的有效直径的十分之一。
[0474]
方面55.根据方面49所述的装置,其中由所述第三fia传递到所述第三fma的所述远尾流中的所述诱导速度具有平行于所述局部自由流流动的非零净分量。
[0475]
方面56.根据方面55所述的装置,其中所述第三fia是机身或螺旋桨,并且被配置成在标称水平巡航操作期间生成推力或阻力。
[0476]
方面57.根据方面40所述的装置,其中所述边界装置位于由所述imca的前缘和后缘形成的所述流管内。
[0477]
方面58.一种减小飞行器的波阻力的方法,所述方法包含:提供第一流体操纵装置(“fma”);在所述第一fma的下游流管内至少部分地提供第二fma;以及提供压力容纳装置(“pca”),其被配置成至少部分地包围穿过所述第一fma和所述第二fma两者的流管。
[0478]
方面59.根据方面58所述的方法,其中流体是可压缩的,并且其中所述第一fma被配置成使所述流体减速并增大所述流体的压力,并且其中所述第二fma被配置成使所述流体加速并降低所述流体的压力,并且其中所述方法进一步包含在所述pca内提供机翼,使得与自由流流动相比,以较低速度、较高压力流态生成升力。
[0479]
方面60.根据方面58所述的方法,其中流体是不可压缩的,并且其中所述第一fma被配置成使所述流体加速并降低所述流体的压力,并且其中所述第二fma被配置成使所述流体减速并增大所述流体的压力,并且其中所述方法进一步包含将较低压力和较低横截面积的流经由所述pca通过飞行器从所述第一fma传输到所述第二fma,使得所述飞行器生成较少的波阻力。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1