具有电压调节器的飞行器推进系统的制作方法
1.本发明总体上涉及电动飞行器推进系统,并且更具体地涉及用于这种系统的电压的控制。
背景技术:
2.尽管正在显示对此更多的兴趣,但是具有电推进系统的飞行器目前并不普遍。与燃烧推进系统相比,电推进系统面临独特的挑战,特别是如果具有电力系统的飞行器要在与具有燃烧动力系统的飞行器相同或相似的飞行包线中安全运行。
3.必须克服的一个特定技术问题是,电推进系统包括必须绝缘的电导体,使得在整个飞行包线中,电导体不会经历局部放电。对于具有包括较高高度的飞行包线的飞行器而言尤其如此,其中降低的空气密度提供较少的电绝缘,这在所有其他条件相同的情况下增加了局部放电的可能性。
技术实现要素:
4.在一方面,本公开涉及一种用于飞行器的飞行器推进系统,飞行器包括螺旋桨,可操作地旋转螺旋桨的电机,向电机提供电力的电源以及电压调节器。该电压调节器,用以调节从所述电源提供给电机的电力,并配置为根据飞行器的至少一部分中的环境气压来控制所提供的电力的电压。
5.在另一方面,本公开涉及一种操作配电系统的方法,该配电系统具有电导体,该电导体向旋转地驱动飞行器中的螺旋桨的电机供电,该方法包括感测该电导体的环境气压,以及基于感测到的环境气压来控制电导体处的电压。
附图说明
6.图1是具有飞行器推进系统的飞行器的示意图。
7.图2是具有图1的飞行器推进系统的飞行器的变型的示意图。
8.图3是具有图1的飞行器推进系统的飞行器的另一变型的示意图。
9.图4是具有图3的飞行器推进系统的飞行器的变型的示意图。
10.图5是示出操作配电系统的方法的流程图,该配电系统可以至少部分地由具有图1-图4的飞行器推进系统的飞行器执行。
具体实施方式
11.本公开的方面描述了具有电机的飞行器推进系统,该电机旋转至少一个螺旋桨、风扇、涡轮或类似装置。如非限制性示例所示,该至少一个螺旋桨可以是任何推进器或推进装置。电力从电源经由电导体提供给电机。电压调节器可以调节从电源提供给电机的电压,并因此调节提供给至少一部分电导体的电压。可选地,电压调节器可以调节提供给一个或多个逆变器的电压,其中一个或多个逆变器向电机提供电压。所提供的功率的电压可以是
电导体的环境气压的函数。在电导体暴露于大气压的情况下,环境气压是飞行器高度的函数,使电压成为高度的函数。
12.连接参考(例如,附接、联接、连接、固定、紧固和结合)将被广义地解释,并且除非另外指出,否则可包括元件集合之间的中间构件以及元件之间的相对运动。这样,连接参考不一定推断出两个元件直接连接并且彼此成固定关系。示例性附图仅出于说明的目的,所附附图中反映的尺寸、位置、顺序和相对尺寸可以变化。
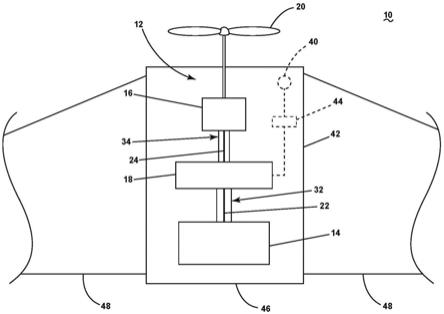
13.图1是具有飞行器推进系统12的飞行器10的示意图。飞行器推进系统12包括至少一个电源14、至少一个电机16、至少一个电压调节器18和至少一个螺旋桨20。螺旋桨20由电机16可操作地旋转。电机16经由电压调节器18由电源14供电。电压调节器18调节从电源14提供给电机16的电力。
14.电源14可以是提供电输出的元件的任何配置,例如交流电(ac)或直流电(dc)。电源14可以是蓄电装置。蓄电机器的非限制性示例可以包括电池、电容器或热系统中的一个或多个。附加地或替代地,电源14可以是带有发电机或整流器的内燃机。通过非限制性示例,内燃机可以是涡轮发动机或活塞发动机。
15.电机16可以是可以将电能转换成机械能或将机械能转换成电能的任何电磁机。即,电机16包括一个或多个定子/转子组合。非限制性示例包括发电机、电动机或发电机/电动机的组合。发电机或电动机可以是ac或dc发电机或电动机。
16.电压调节器18可以包括任何数量的电气或机械部件,从而导致来自电压调节器18的输出是稳定的、预定的和受控的值。来自电压调节器18的输出值可以大于到电压调节器18的输入电压,尽管可以想到,输出值可以等于或小于输入值。作为非限制性示例,电压调节器18可位于电源14内或直接耦合到电源14。可替代地,电压调节器18可包括逆变器、转换器、整流器、电容器、电阻器、二极管、电感器、晶体管、调节器、开关、变压器或放大器的一个或多个的任意组合。电压调节器18可以用作功率吸收器或电源,其中电压调节器18可以用于控制功率、电压或电流。
17.第一电导体22可以将电源14连接到电压调节器18。第二电导体24可以将电压调节器18连接到电机16。第一电导体22或第二电导体24的至少一部分位于飞行器10的至少一部分中。
18.第一电导体22和第二电导体24可以包括电绝缘。电绝缘可以是用于减小局部放电的可能性、电导体的老化或其他类型的绝缘故障的任何已知的电绝缘材料。通过非限制示例,第一电绝缘体32可以围绕、包裹、包覆或以其他方式绝缘第一电导体22。类似地,第二电绝缘体34可以围绕、包裹、包覆或以其他方式绝缘第二电导体24。第一电绝缘体32可以具有与第二电绝缘体34不同的组成或不同的尺寸。尺寸或大小可以包括但不限于规格、直径、横截面积或绝缘体的其他可测量的方面。
19.具有第一电绝缘体32的第一电导体22或具有第二电绝缘体34的第二电导体24的至少一部分可暴露于周围环境的压力下,并将其称为环境压力。可以想到,在大多数情况下,环境压力将是当前高度下的飞行器外部的环境压力,即大气压。在这种情况下,环境压力与大气压相同。然而,一些飞行器包含相对于大气压主动或被动地加压的加压区域,并且如果电导体位于加压区域中,则环境压力将不同于大气压。
20.第一电绝缘体32或第二电绝缘体34的尺寸可设置成当电源14处于最大电压时,防
止第一电导体22和第二电导体24在环境气压下局部放电或绝缘故障。
21.通过非限制性示例,第一电绝缘体32的尺寸可以被设置成防止第一电导体22在整个飞行器推进系统12的飞行包线内处于最大电压下的局部放电或绝缘故障。可选地,电绝缘体34的尺寸可以不被设置成防止第二电导体24在飞行器推进系统12的整个飞行包线内处于最大电压下的局部放电或绝缘故障。
22.至少一个传感器40可用于获得环境气压或与环境气压有关的信息。环境气压可以是飞行器10内或周围的任何点的压力。如图所示,至少一个传感器40可以位于飞行器10内部。可以想到的是,至少一个传感器40可以耦合到飞行器10的包括飞行器10的外部42的任何部分。进一步可以想到的是,至少一个传感器40可以是安装到飞行器10的任何部分的多个传感器。作为非限制性示例,至少一个传感器40可以是压力传感器、高度计、湿度传感器、全球定位传感器(gps)或温度传感器中的一个或多个。
23.至少一个传感器40可以可操作地耦合到电压调节器18。可选地,控制器44可以提供从至少一个传感器40到电压调节器18的通信。许多已知类型的控制器可以用于控制器44。控制器的具体类型与本公开无关。控制器44可以被包括在已知的飞行管理系统中或与已知的飞行管理系统通信。
24.通过非限制性示例,示出了飞行器推进系统12,该飞行器推进系统12联接到或容纳在飞行器10的机身46内。可以想到的是,飞行器推进系统12的任何部分都可以联接到或容纳在飞行器10的其他部件内,该部件可以包括但不限于机翼48。
25.尽管以示例的方式将电压调节器示出为单个电压调节器18。在飞行器10中可以使用任何数量的电压调节器来调节电动机16的功率。可以想到,电压调节器18可以调节第一导体22、第二导体24或第一导体22和第二导体24处的电压。还可以想到,电压调节器18可以调节飞行器10内的任何电导体的电压。
26.图2示意性地示出了具有飞行器推进系统112的飞行器110,该飞行器110与具有飞行器推进系统12的飞行器10基本相似。因此,相似的部件将用相似的数字来标识,并增加100。除非另有说明,否则飞行器推进系统12的类似部件适用于飞行器推进系统112。
27.飞行器推进系统112包括电源114、电机116、电压调节器118、第一螺旋桨120a和第二螺旋桨120b。电源114包括带有发电机128的内燃机126,其中内燃机126和发电机128可一起形成或分开形成。可选地,具有绝缘体131的电通信器130可以提供内燃机126与发电机128之间的电连接。绝缘体131可以类似于第一电绝缘体132。第一螺旋桨120a可旋转地联接至内燃机126。
28.具有第一电绝缘体132的第一电导体122可以将电源114的发电机128与电压调节器118电连接。具有第二电绝缘体134的第二电导体124可以将电压调节器118与电机116电连接。可选地,第二电导体124可以将调压器118耦合至逆变器136。具有绝缘体139的电通信器138可以将逆变器136连接至电机116。绝缘体139在尺寸或绝缘性能上与第二电绝缘134相似。第二螺旋桨120b通过电机116可操作地旋转。
29.电机116经由电压调节器118由电源114供电。电压调节器118调节从电源114提供给电机116的电功率或电压。
30.可以想到的是,逆变器136可以是用于改变电信号的已知电子设备的任意组合,并且可以进一步包括附加的电压控制机制。
31.图3示意性地示出了具有飞行器推进系统212的飞行器210,该飞行器210与具有飞行器推进系统12的飞行器10基本相似。因此,相似的部件将用相似的数字来标识,并增加200。除非另有说明,否则飞行器推进系统12的类似部件适用于飞行器推进系统212。
32.飞行器推进系统212包括电源214、多个电机216、电压调节器218和多个螺旋桨220。电源214包括带有发电机228的内燃机226,其中内燃机226和发电机228可以一起形成或分开形成。具有绝缘体231的可选的电通信器230可以在内燃机226和发电机228之间提供电连接。绝缘体231可以类似于第一电绝缘体232。
33.具有第一电绝缘体232的第一电导体222可以将电源214的发电机228与电压调节器218电连接。具有第二电绝缘体234的第二电导体224可以将电压调节器218与电机216电连接。然后,如图所示,多个电机216中的每一个可旋转地操作多个螺旋桨220之一。
34.可选地,第二电导体224可以将电压调节器218耦合到多个逆变器236,其中多个逆变器236中的每个电连接到多个电机216之一。具有绝缘体239的电通信器238可以将多个逆变器236中的每个连接到多个电机216之一。
35.电机216经由电压调节器218由电源214供电。电压调节器218调节从电源214提供给电机216的电功率。
36.可以想到,电压调节器218可以是多个电压调节器,其中多个电压调节器中的每一个耦合到多个逆变器236或多个电机216之一。
37.还可以想到,多个逆变器236可以是电子设备的任何组合,并且可以进一步包括电压控制机制。
38.图4示意性地示出了具有飞行器推进系统312的飞行器310,该飞行器310与具有飞行器推进系统212的飞行器210基本相似。因此,相似的部件将用相似的数字来标识,并增加100,应当理解,除非另有说明,否则飞行器推进系统212的类似部件适用于飞行器推进系统312。
39.飞行器推进系统312包括电源314、多个电机316、调压器318和多个螺旋桨320。电源314包括蓄电机317。
40.具有第一电绝缘体332的第一电导体322可以电连接电源314的蓄电机317和电压调节器318。具有第二电绝缘体334的第二电导体324可以电连接电压调节器318与电机316。然后,如图所示,多个电机316中的每一个可旋转地操作多个推进器320之一。
41.可选地,第二电导体324可以将电压调节器318耦合到多个逆变器336,其中多个逆变器336中的每一个电连接到多个电机316中的一个。具有绝缘体339的电通信器338可以将多个逆变器336中的每个连接到多个电机316之一。
42.电机316经由电压调节器318由电源314供电。电压调节器318调节从电源314提供给电机316的电力。
43.可以想到,电压调节器218可以是多个电压调节器,其中多个电压调节器中的每一个都耦合到多个逆变器336或多个电机316之一。
44.进一步可以想到,多个逆变器336可以是电子设备的任何组合,并且可以进一步包括电压控制机制。
45.图5示出了用于操作配电系统的方法400,该配电系统包括第二电导体或电导体24、124、224、324,其中,电导体24、124、224、324向电机16、116、216、316供电,电机16、116、
216、316旋转地驱动飞行器10、110、210、310中的螺旋桨20、120b,220、320。在步骤202处,感测电导体24、124、224、324的环境气压。例如,至少一个传感器40可以用于获得环境气压,例如电导体24、124、224、324的大气压。传感器40可以位于飞行器10、110、210的已知具有与电导体24、124、224、324相同的环境气压或大气压的区域中。
46.在步骤404中,基于感测到的环境气压来控制电导体24、124、224、324的电压。例如,至少一个传感器40可以用于获得电导体24、124、224、324的环境气压。该信息可以被传送到控制器44。控制器44然后确定与环境气压相对应的阈值电压。电压调节器18、118、218、318从控制器44接收阈值电压。然后,由电压调节器18、118、218、318将电导体24、124、224、324处的电压控制为等于或小于阈值电压。基于感测到的环境气压来控制电压可以防止电导体24、124、224、324的局部放电、加速老化或其他绝缘故障。
47.在操作中,飞行器推进系统12、112、212、312具有由区域限定的飞行包线,在该区域中,具有飞行器推进系统12的飞行器10、110、210、310可以基于多种因素安全运行,这些因素包括,但不限于速度、高度、空气密度或迎角。具有飞行器推进系统12的飞行器10、110、210、310包括具有第一电绝缘体32、132、232、332的第一电导体22、122、222、322,第一电绝缘体32、132、232、332的尺寸被设置为能够防止第一电导体22、122、222、322在飞行器推进系统12、112、212、312的整个飞行包线中处于最大电压时的局部放电或其他绝缘故障。第一电导体22、122、222、322电连接电源14、114、214、314与电压调节器18、118、218、318。
48.在飞行包线期间,环境气压的降低表明存在较少的大气来为第一电导体22、122、222、322提供绝缘。在第一电导体22、122、222、322上的第一电绝缘体32、132、232、332必须足够厚,以在提供最大电压时减少第一电导体22、122、222、322在飞行包线的最高高度处发生局部放电的可能性、加速老化或其他绝缘故障。
49.然而,例如,飞行器10在较高的高度上通常不具有与起飞期间相同的功率需求。在较高高度处降低功率需求允许飞行器推进系统12、112、212、312利用电压调节器18、118、218、318来向电机16、116、216、316提供降低的电压或功率。第二电导体24、124、224、324将电压调节器18、118、218、318和电机16、116、216、316电连接。因为电压调节器18、118、218、318可以基于环境气压将第二电导体24、124、224、324处的电压控制为小于或等于最大电压,所以第二电绝缘体34、134、234、334的尺寸可设置为小于第一电导体22、122、222、322。可以使用与控制器44通信的至少一个传感器40来确定第二电导体24、124、224、324处的适当阈值电压,从而导致电功率或电压是环境气压的函数。基于由至少一个传感器获得的第二电导体24、124、224、324的环境气压来确定第二电导体24、124、224、324的阈值电压。阈值电压防止第二电导体24、124、224、324的局部放电。由于电机16、116、216、316在较高的高度上需要较少的功率,特别是在巡航时,因此飞行器10、110、210、310的运行不受第二电导体24、124、224、324处的电压下降的影响。
50.替代地,电压调节器18、118、218、318可以向电机16、116、216、316提供恒定的功率,同时将电压调节到由高度确定的阈值电压。这是通过允许电流相应地变化以在变化的阈值电压下提供恒定功率来实现的。
51.本文公开的系统和方法的技术效果提供了一种控制系统,该控制系统可以根据电导体的环境气压来改变供电电压。环境气压可以至少部分地是高度的函数,使电压也成为高度的函数。通过控制电压,至少一些电导体需要较少的电绝缘,以减少从电导体局部放电
的可能性。
52.另外,基于高度控制电压可以减少导体的老化。基于高度确定的阈值电压对电压的操作会导致飞行过程中流经导体的累积电流较低,因此导体受到的热冲击较小。同样,随着电流引起的热量的减少,绝缘体的磨损也会减少。流过导体的累积电流越小,每次飞行的累积散热也越低。
53.本公开的各方面提供了多种益处。例如,通过减小第二电绝缘的尺寸,飞行器的重量也将减小。飞行器重量的减少有助于提高燃油效率。
54.本公开的另一个优点是由于减小了放置在第二电导体上的第二电绝缘的尺寸或量而节省了成本。
55.除了以上附图中所示的那些配置之外,本公开还考虑了许多其他可能的配置。例如,可以在单个飞行器上使用一个以上的飞行器推进系统,其中多个飞行器推进系统可以包括相似或不同的部件。在尚未描述的程度上,各个方面的不同特征和结构可以根据需要与其他方面组合使用。一个特性不能在所有方面都得到说明,这并不意味着它不能被解释,而是为了描述的简洁而这样做。因此,不管是否明确地描述了新方面,可以根据需要混合和匹配不同方面的各种特征以形成新方面。本文所描述的特征的组合或排列被本公开覆盖。
56.该书面描述使用示例来公开本发明的各个方面,包括最佳模式,并且还使本领域的任何技术人员能够实践本发明的各个方面,包括制造和使用任何机器、设备或系统以及执行任何合并的方法。本发明的专利范围由权利要求书限定,并且可以包括本领域技术人员想到的其他示例。该其他实例具有与权利要求的文字语言没有区别的结构要素,或者包含与权利要求的文字语言有同等差别的结构要素,但与权利要求的文字语言没有实质区别的,属于权利要求的范围。
57.本发明的进一步方面通过以下条项的主题提供:
58.1.一种用于飞行器的飞行器推进系统,包括:螺旋桨;电机,所述电机可操作地旋转所述螺旋桨;电源,所述电源向所述电机提供电力;以及电压调节器,所述电压调节器调节从所述电源提供给所述电机的电力,并且所述电压调节器被配置为根据所述飞行器的至少一部分中的环境气压来控制所提供的所述电力的电压。
59.2.根据任何在前条项所述的飞行器推进系统,还包括将所述电压调节器连接至所述电机的电导体,并且所述飞行器的至少一部分包括所述电导体的至少一部分。
60.3.根据任何在前条项所述的飞行器推进系统,其中,所述电导体包括电绝缘体。
61.4.根据任何在前条项所述的飞行器推进系统,其中,所述电绝缘体的尺寸被设置成防止在环境气压下在所述电源的最大电压下的局部放电。
62.5.根据任何在前条项所述的飞行器推进系统,其中,所述电绝缘体的尺寸不被设置成防止在所述飞行器推进系统的整个飞行包线中的局部放电。
63.6.根据任何在前条项所述的飞行器推进系统,其中,所述电压调节器被配置为控制所提供的电力的电压,以防止在整个飞行包线中的局部放电。
64.7.根据任何在前条项所述的飞行器推进系统,其中,还包括可操作地联接至所述电压调节器的环境气压传感器。
65.8.根据任何在前条项所述的飞行器推进系统,其中,所述环境气压传感器是高度计。
66.9.根据任何在前条项所述的飞行器推进系统,其中,电导体暴露于大气压,并且所述环境气压是当前大气压。
67.10.根据任何在前条项所述的飞行器推进系统,其中,所述电源是交流或直流电源中的一个。
68.11.根据任何在前条项所述的飞行器推进系统,其中,所述电机是交流或直流电动机中的至少一个。
69.12.根据任何在前条项所述的飞行器推进系统,其中,所述螺旋桨包括多个螺旋桨。
70.13.根据任何在前条项所述的飞行器推进系统,其中,所述电机包括多个电机,其中,所述多个螺旋桨中的每一个由所述多个电机中的不同的电机旋转地驱动。
71.14.根据任何在前条项所述的飞行器推进系统,其中,所述电压调节器电联接至所有所述多个电机。
72.15.根据任何在前条项所述的飞行器推进系统,其中,所述电压调节器包括多个电压调节器,所述多个电机中的每个电机电联接至所述多个电压调节器中的不同的电压调节器。
73.16.根据任何在前条项所述的飞行器推进系统,其中,所述电源包括带有发电机的内燃机或蓄电装置中的至少一个。
74.17.根据任何在前条项所述的飞行器推进系统,其中,所述电压调节器包括逆变器或转换器。
75.18.一种操作配电系统的方法,该配电系统具有电导体,该电导体向旋转地驱动飞行器中的螺旋桨的电机供电,该方法包括感测该电导体的环境气压,并根据感测到的环境气压控制该电导体处的电压。
76.19.根据任何在前条项所述的方法,其中,控制所述电压包括基于感测到的环境气压来控制所述电压,以防止从所述电导体的局部放电。
77.20.根据任何在前条项所述的方法,其中,感测到的环境气压是大气压。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1