一种分布驱动的柔性驱动装置的制作方法
[0001]
本发明属于驱动装置技术领域,具体涉及一种分布驱动的柔性驱动装置。
背景技术:
[0002]
变体飞机可以在飞行过程中改变自身的形状,从而使飞机获得不同的气动特性以应对不同的飞行环境,完成不同的飞行任务。后缘变弯度机翼作为一种在结构上比较容易实现的变形方式,在研究领域中备受关注。
[0003]
其中,后缘变弯度机翼的驱动装置设计是一项关键技术。传统的驱动装置采用电或液压为动力,技术比较成熟,但在功率需求、安装精度、系统复杂程度等方面都有相应的要求。例如液压作动筒驱动器和电机驱动器因为对安装环境要求较高,且无法提供分布式驱动,所以不适合作为后缘变弯度机翼的驱动方式。
[0004]
对于变体飞机的后缘变弯度机翼结构,如果用分段式柔性翼肋来满足复杂多变的结构形状要求,需要采用分布式驱动,即在各肋节之间都布置驱动,使得弯度变形均匀,因此设计一种分布驱动的柔性驱动装置。
技术实现要素:
[0005]
本发明针对变体飞机后缘变弯度机翼结构的驱动问题,提供一种分布式驱动的柔性驱动器,对分段式柔性翼肋进行分布式驱动,使后缘变弯度机翼更光滑柔顺地改变形状。
[0006]
本发明是这样实现的:
[0007]
一种分布驱动的柔性驱动装置,其特征在于,所述的装置为一个整体式结构,包括固定接头,所述的固定接头上设置有充排液阀,充排液阀可以调整液体的压力和体积来改变行程和驱动力;所述的固定接头的末端设置有密封腔体,所述的密封腔体与固定接头之间通过圆形环带紧固密封连接;所述的密封腔体外壁嵌套设置可变形承载体,所述的可变形承载体起始端外壁设置有螺套,实现可变形承载体与固定接头紧固连接;所述的可变形承载体的对应分布驱动的位置处设置连接环,连接环包括有内连接环、外连接环,所述的可变形承载体为两端带有金属圆环的纤维编成的柱面形编织网网状结构。本发明的可变形承载体是驱动器的主承载结构,可产生预想的柔性变形,从而实现柔性驱动;密封腔体在内部受到充压后可将压力传递给可变形承载体;通过可变形承载体上设置的多个连接环与被驱动结构连接,可以使驱动器的每一段都能产生驱动载荷和位移,从而实现分布驱动。
[0008]
进一步,所述的固定接头由金属材料制成,端头是一个方形底座,底座的四个角打有连接孔,利用螺钉将固定接头与驱动对象进行连接,其余各段为内径相等外径不同五段,分别为第一段、第二段、第三段、第四段、第五段;固定接头将各结构进行连接,使得各部分组成一个整体,最终该柔性驱动器作为一个整体可对驱动对象提供分布驱动力和驱动位移。第一段外设置有充排液阀,与固定接头进行螺纹连接。
[0009]
进一步,可变形承载体的金属圆环套在固定接头第三段上,利用螺套将圆环卡住,只允许可变形承载体纤维网通过螺套和固定接头之间的间隙,实现可变形承载体与固定接
头的紧密连接。
[0010]
进一步,所述的固定接头第四段与固定接头第五段连接处设有一段环形凹槽,密封腔体套在环形凹槽上,利用圆形环带将密封腔体卡在凹槽处,使得密封腔体与固定接头紧密相连,实现密封。
[0011]
进一步,所述的螺套设置为四段,螺套第一段刻有内螺纹,与固定接头的外螺纹配合连接;螺套的第二段是等直径段,与固定接头的第三段配合,螺套的第二段内径大于固定接头第三段的外径,可变形承载体的纤维编织网能够通过固定接头与螺套之间的间隙,但是金属圆环无法通过,起到对金属圆环的固定作用;螺套的第三段是变直径段,与固定接头的第四段配合,螺套的第三段内径大于固定接头第四段的外径,将可变形承载体固定在端头上;螺套的第四段是等直径段,与固定接头的第五段配合,螺套的第四段内表面是圆柱面,圆心与螺套的第一段、第二段、第三段的圆心相同,螺套的第四段内表面直径大于固定接头第五段的外径,螺套的第四段外表面设置为正六棱柱面。便于使用扳手将螺套拧紧,在固定可变形承载体的同时还将圆形环带压紧在凹槽处。因为可变形承载体末端厚度比起端的厚度大,因此末端螺套第二段的内径比起端螺套第二段的内径要略大一些。
[0012]
进一步,所述的内连接环的外表面上刻有滚花,滚花的角度按可变形承载体的初始纤维角刻划,深度足够将纤维网嵌到滚花内不会产生自由移动,在内连接环的左右端部所刻滚花的角度大于其他部分,本发明中内连接环的圆柱面上刻滚花,然后在靠近起始和末尾端的滚花角度略大一些,即滚花的最左端和最右端的角度略大一些,多留出一部分空间以防止在变形后此处的纤维破坏;所述的外连接环的外表面上刻有圆环凹槽,在相应位置处与分布驱动的对象连接。
[0013]
进一步,所述的可变形承载体两端的圆环所在平面是可变形承载体的端面,可变形承载体的轴线与该端面垂直,将纤维沿着圆环的圆周绕在圆环上,即在圆环处折回;可变形承载体柱面外面的纤维与可变形承载体的轴线方向成正螺旋角,折回的柱面里面的纤维与轴线方向成负螺旋角,正、负螺旋角方向的纤维编织成网,共编织两层,即形成为可变形承载体的纤维编织网。
[0014]
进一步,所述的可变形承载体的纤维网编织到末端即纤维编织结束端时,该处绕圆环的纤维网比起端,即比纤维编织起始端处绕圆环的纤维网厚;所述的螺旋角定义为螺旋线与可变形承载体的轴线之间的角度,所述的纤维的材料选择金属纤维或碳纤维。
[0015]
本发明装置的工作方式为:
[0016]
该柔性驱动器用来对驱动对象进行柔性驱动。当通过充排液阀对密封腔体进行充压时,密封腔体发生膨胀,对可变形承载体产生作用力。可变形承载体在受力后对密封腔体产生沿纤维轴向的反作用力,将该反作用力沿密封腔体的轴向和径向进行分解,其中沿径向的分力大于沿轴向的力,而密封腔体所受压强产生的力在各个方向上相等,所以阻碍径向膨胀的力大于阻碍轴向膨胀的力,因为纤维长度不变,因此可变形承载体会产生轴向的伸长和径向的缩短,螺旋角也会随之减小,直到达到自锁角而不再发生变化,称此状态为自锁状态。在自锁状态时与初始状态相比,密封腔体伸长的距离称为驱动行程,而在驱动过程中对外界作用的轴向的力称为驱动力。而在分布驱动的对应位置处,连接环将密封腔体和可变形承载体与驱动支臂(卡箍)紧密相连,使得密封腔体的伸长受到限制,从而对驱动支臂(卡箍)产生了轴向的驱动力,并传递到驱动对象之上,使得驱动器各段均对驱动对象产
生驱动力,从而实现分布驱动。
[0017]
本发明与现有技术相比的有益效果在于:
[0018]
对于变体飞机的后缘变弯度机翼结构,如果用分段式柔性翼肋来满足复杂多变的结构形状要求,需要采用分布式驱动,即在各肋节之间都布置驱动,使得弯度变形均匀,由于本发明的分布驱动的柔性驱动器具有体积小、重量轻、结构简单、易于连接、安装方便的优点,驱动器上具有多个连接点均可以输出驱动力和驱动位移,对分段式翼肋进行分布式驱动,能够提高驱动的可靠性,从而使整个后缘变弯度机翼在变形时保持良好的连续性。
附图说明
[0019]
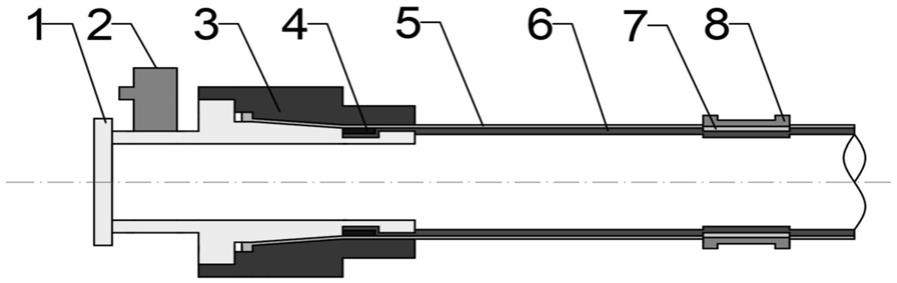
图1是本发明一种分布驱动的柔性驱动装置的结构示意图;
[0020]
图2是本发明一种分布驱动的柔性驱动装置的外连接环示意图;
[0021]
图3是本发明一种分布驱动的柔性驱动装置的内连接环示意图;
[0022]
图4是本发明一种分布驱动的柔性驱动装置的固定接头示意图;
[0023]
图5是本发明一种分布驱动的柔性驱动装置的起端螺套示意图;
[0024]
图6是本发明一种分布驱动的柔性驱动装置的末端螺套示意图;
[0025]
图7是本发明一种分布驱动的柔性驱动装置的螺套轴向示意图;
[0026]
图8是本发明一种分布驱动的柔性驱动装置的可变形承载体示意图;
[0027]
其中,1是固定接头,2是充排液阀,3是螺套,4是圆形环带,5是可变形承载体,6是密封腔体,7是内连接环,8是外连接环。
具体实施方式
[0028]
为使本发明的目的、技术方案及效果更加清楚,明确,以下列举实例对本发明进一步详细说明。应当指出此处所描述的具体实施仅用以解释本发明,并不用于限定本发明。
[0029]
如图1~8所示,本发明的分布驱动的柔性驱动装置主要包括固定接头1,充排液阀2,螺套3,圆形环带4,可变形承载体5,密封腔体6,内连接环7,外连接环8。在对本发明的驱动器进行安装时,首先将密封腔体6套在固定接头1上,然后用圆形环带4将密封腔体6与固定接头1紧密相连,实现密封,再将可变形承载体5套在密封腔体6外,在对应分布驱动的位置处将连接环与可变形承载体连接,并用螺套3把可变形承载体5和固定接头1进行连接,然后在固定接头端部设置充排液阀2,最后使用螺钉将固定接头与驱动对象连接在一起。
[0030]
如图8所示,本发明的可变形承载体5是一个两端带有圆环的纤维编成的柱面形网状结构,圆环所在平面是可变形承载体的端面,可变形承载体5的轴线与该端面垂直,将纤维沿着圆环的圆周绕在圆环上(在圆环处折回),柱面外面的纤维与轴线方向成正螺旋角,(折回的)柱面里面的纤维与轴线方向成负螺旋角,正、负螺旋角方向的纤维编织成网,共编织两层,从而得到所要求的纤维编织网。当可变形承载体的纤维网编织到末端(纤维编织结束端)时,因为需要将纤维锁住,所以该处绕圆环的纤维网比起端(纤维编织起始端)处绕圆环的纤维网更厚。螺旋角定义为螺旋线与轴线之间的角度(大于60
°
),可变形承载体的长度(考虑预伸长)与被驱动结构相对运动的起点与终点之间的长度大致相等,可变形承载体的直径和纤维角大小应满足驱动要求,纤维的直径和材料应满足强度要求,纤维的材料可选择金属纤维(如钢丝)或碳纤维。
[0031]
本发明的密封腔体6由耐油腐蚀的橡胶制成,用圆形环带4压紧在固定接头1上,实现与固定接头1密封连接。密封腔体6在可变形承载体5的内部,在充压后会膨胀对可变形承载体产生作用力。
[0032]
如图4所示,本发明的固定接头1由金属材料制成,端头是一个方形底座,底座的四个角打有连接孔,可以使用螺钉将固定接头与驱动对象进行连接,其余各段的内径相等,外径不同:第一段与充排液阀2进行螺纹连接,第二段刻有螺纹,第三段是等直径段,第四段是变直径段,第五段是等直径段。在安装时将可变形承载体5的金属圆环套在第三段上,然后使用螺套3将圆环卡住,只允许纤维网通过螺套和固定接头之间的间隙,实现可变形承载体与固定接头的紧密连接。在第五段上靠近第四段的一端有一段环形凹槽,在安装时将密封腔体套在圆管上,然后取一圆形环带将密封腔体卡在凹槽处,使得密封腔体与固定接头紧密相连,实现密封。
[0033]
如图5~6所示,图5以及图6中所示的第二段的内径是不一样的,可变形承载体在编织到末端时,因为要将纤维锁住,所以要比起端多绕两层纤维,相当于在末端的厚度大于起端的厚度,这个厚度不同的位置相对应的螺套第二段的内径也存在不同,末端螺套的内径大于起端螺套,因为多出来的厚度不是很大所以在图上显示的也不明显,即起端螺套和末端螺套是存在细微的差别。本发明的螺套3设置为四段;第一段刻有内螺纹,与固定接头的外螺纹配合连接;第二段是等直径段,与固定接头的第三段配合,其内径大于固定接头第三段的外径,可变形承载体的纤维编织网可以通过固定接头与螺套之间的间隙,但是金属圆环无法通过,从而起到了对金属圆环的固定作用;第三段是变直径段,与固定接头的第四段配合,其内径大于固定接头第四段的外径,将可变形承载体固定在端头上(压紧);第四段是等直径段,与固定接头的第五段配合,其内表面是圆柱面,圆心与前面几段的圆心相同,直径大于固定接头第五段的外径,外表面是正六棱柱面,便于使用扳手将螺套拧紧,在固定可变形承载体的同时还将圆形环带压紧在凹槽处。因为可变形承载体末端厚度比起端的厚度大,因此末端螺套第二段的内径比起端螺套第二段的内径要略大一些。
[0034]
在可变形承载体对应分布驱动的位置处设置连接环,连接环包括内连接环7和外连接环8,如图2~3所示。内连接环7的外表面上刻有滚花,滚花的角度按可变形承载体的初始纤维角刻划,深度足够将纤维网嵌到滚花内不会产生自由移动,在内连接环7的左右端部所刻滚花的角度稍大一些。外连接环8的外表面上刻有圆环凹槽,在相应位置处与分布驱动的对象连接。外连接环与内连接环的固紧可采用两种方法:1、热加工法,利用热胀冷缩的原理,对外连接环进行加热而不加热内连接环,使得在内连接环不膨胀而外连接环膨胀的情况下将纤维网套入内连接环所刻的滚花中,在冷却后外连接环收缩,从而与内连接环紧密连接,将纤维网夹紧,不与连接环产生相对滑动;2、使用形状记忆合金(sma材料):使用形状记忆合金加工外连接环,使外连接环在低温马氏体相时扩径,能将内连接环和可变形承载体套在外连接环的内径中,升温至奥氏体相时外连接环可以与内连接环紧密连接。
[0035]
下面利用具体的数据实例叙述本发明的分布驱动的柔性驱动装置:
[0036]
选取一变弯度机翼后缘进行驱动,机翼后缘偏转15
°
,在0.4马赫数和后缘偏转15
°
下,变弯度后缘部分的气动载荷分布近似为峰值0.02mpa的三角形分布。
[0037]
所选翼段展向长400mm,后缘可变形部分沿弦向长600mm,用三个腹板将后缘除末端以外的部分分成四段,每段长120mm,在每个肋节处有一个驱动支臂(卡箍)与腹板连接。
整个驱动器长480mm,被各个肋节处的驱动支臂分成四段,每段长120mm,后墙腹板处上下两个驱动器之间的距离为150mm。通过积分可以求得后墙腹板所受的弯矩为480n
·
m,第一个驱动支臂所受的弯矩为384n
·
m,第二个驱动支臂所受的弯矩为288n
·
m,第三个驱动支臂所受的弯矩为192n
·
m,第四个驱动支臂所受的弯矩为96n
·
m。
[0038]
密封腔体由橡胶制成,外径为17mm,内径为15mm。可变形承载体的圆环由1mm直径的45号钢的钢丝制成,起端圆环外径为21.5mm,内径为19.5mm,末端圆环外径为22mm,内径为20mm。纤维编织网由t700碳纤维制成,网的外径是18mm,纤维的螺旋角为75
°
(所选螺旋角的大小与驱动器所要达成的驱动行程有关),单根碳纤维的直径是0.125mm,纤维的弹性模量为230gpa,纤维的泊松比为0.307,纤维的抗拉强度为3500mpa。编织时,先将四根纤维合成一股,再按纤维角将这一股纤维搭在圆环上并折回,其余纤维均按此方式沿着圆环的一周绕在圆环上,将圆环布满,然后按一股沿正螺旋角方向另一股沿负螺旋角方向的方式进行编织,共编织两层,并保证编织密度足以使得密封腔体不会从纤维网的空隙中凸出来。
[0039]
固定接头由45钢制成,端头处方形底座的厚度(轴向长度)为2.5mm,边长为20mm,其余各段的内径相等,均为12mm,外径各不相同。其中第一段外径为16mm,长度为12mm,第一段上的m8x1螺纹孔的圆心在距离底座6mm的位置,所安装的充(排)液阀的内径为4mm,壁厚为1mm,刻有m8x1的外螺纹;第二段的外径为26mm,长度为5mm,刻有m26x1的外螺纹;第三段的外径为19mm,长度为2.5mm;第四段的最大外径为19mm,最小外径为17mm,长度为12.5mm;第五段外径为16mm,长度为10mm,凹槽长度为5mm,深度为1mm。固定密封腔体所用的圆形环带的外径为17mm,厚度为1mm,宽度为4.5mm。
[0040]
起端螺套总长30mm,第一段刻有m26x1的内螺纹,长5mm,外径为30mm,内径为24mm;第二段长2.5mm,外径为30mm,内径为22mm;第三段长12.5mm,外径为30mm,最大内径为20mm,最小内径为18mm;第四段长10mm,六棱柱的对边距离为24mm,圆孔直径为18mm。末端螺套第二段的内径为23mm,其余参数与起端螺套相同。
[0041]
内连接环的外径为19mm,内径为16mm,长度为12mm;外连接环的外径为24mm,内径为19mm,长度为12mm。外连接环表面上的圆环凹槽深度为1mm,宽度为8mm。
[0042]
为了使用本发明的驱动器驱动机翼后缘偏转15
°
,可以通过充液阀向密封腔体内施加20mpa的压强,由公式s
1
=πd
1
t,s
2
=πd
2
d,(p是充进密封腔体的压强,d1是密封腔体外径,t是密封腔体厚度,d2是可变形承载体纤维网外径,d是可变形承载体纤维网厚度)可以算出可变形承载体纤维所受的拉伸应力为321mpa,满足可变形承载体的强度要求。由公式f=πr
2
·
p,t=f
·
h(p是充进密封腔体的压强,r是密封腔体内半径,h是上下两个驱动器之间的距离)可以算出在左侧底板处驱动器提供的弯矩为603n
·
m,满足驱动需要,使得驱动器产生轴向的伸长,因为驱动支臂对驱动器的约束限制其变形,从而产生对驱动支臂的驱动力,并传递到腹板上,驱动腹板带动转轴产生偏转,最后实现柔性后缘15
°
的偏转。
[0043]
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进,这些改进也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1