一种植保无人机仿地飞行的可视化检测试验台及方法与流程
[0001]
本发明涉及植保无人机飞行性能检测系统及方法,具体涉及一种植保无人机仿地飞行的可视化检测试验台及方法。
背景技术:
[0002]
目前,我国病虫害防治主要以人力背负喷雾机为主,作业效率低,劳动强度大,安全性差。而拖拉机牵引或自走式喷雾机,因受到水田、山地丘陵等特殊地面行走条件影响,在田间作业受到限制。相比之下,无人机施药作业效率高、成本低、农田适应性强,近年来深受农民喜爱。据全国农机标委会农机化分会介绍,截至2017年,我国植保无人机保有量已达1.4万架,跃居世界第一。同时,植保无人机总作业量从2015年的百万亩次增长至2017年的亿亩次。虽然产业发展迅猛,但在行业标准和检测方面,却一直处于空白地带。
[0003]
为了解决上述植保无人机检测方面的问题,授权公告为cn 207379500 u的实用新型专利公开了一种无人机航迹检测装置,该装置包括:架设于基础上的支撑架;设置在所述支撑架上的相机,其用以实时获取无人机飞行过程中的实时图像,所述相机的上方设置有遮挡板且其侧壁均设置有标定杆,所述标定杆用以标定所述相机和所述遮挡板之间的相对关系,上述无人机航迹检测装置通过设置的相机在无人机飞行时对其实时图像进行实时获取,通过观察分析照片的方式还原无人机飞行过程中的航迹。
[0004]
但是上述无人机航迹检测装置还存在以下问题:1、不能实时观察无人机仿地飞行的轨迹;2、不能直观地实时察看无人机在动态变化的仿地形上的飞行精度。
技术实现要素:
[0005]
本发明的目的在于克服现有技术的不足,提供一种植保无人机仿地飞行的可视化检测试验台,实现植保无人机在动态变化的仿地形上飞行时对飞行精度的实时可视化检测。
[0006]
本发明的另一个目的在于提供一种植保无人机仿地飞行的可视化检测方法。
[0007]
本发明解决上述技术问题的技术方案是:
[0008]
一种植保无人机仿地飞行的可视化检测试验台,包括全息投影模块、检测摄影模块、显示模块、用于控制无人机自动飞行的控制模块、地形模拟模块以及运动模块,其中,
[0009]
所述全息投影模块包括用于在模拟地形上的上方投影出双层仿形光幕的3d全息投影机以及3d全息投影通信单元;所述检测摄影模块包括高速摄影机以及摄影通信单元;所述显示模块包括用于与所述摄影通信单元无线连接的显示通信单元以及显示器;所述控制模块包括自动飞行控制单元以及用于规划所述双层仿形光幕的地面控制单元,所述地面控制单元通过3d全息投影通信单元与所述3d全息投影机无线连接,所述自动飞行控制单元与地面控制单元无线连接;
[0010]
所述地形模拟模块包括用于模拟出模拟地形的仿形组件、地形模拟通信单元、用于规划模拟地形的地形控制单元,所述地形控制单元、仿形组件均与地形模拟通信单元无
线连接;所述运动模块包括用于安装所述地形模拟模块的运动平台组件以及运动平台通信单元,所述运动平台通信单元与运动平台组件以及地形模拟通信单元无线连接。
[0011]
上述植保无人机仿地飞行的可视化检测设备的工作原理是:
[0012]
启动地形模拟模块,地形控制单元将地形数据发送至地形模拟通信单元,地形模拟通信单元与仿形组件通信连接,仿形组件接收到地形数据模拟出模拟地形;地形模拟通信单元与运动平台通信单元无线连接,通过运动平台通信单元将运动指令发送至运动平台组件,驱动运动平台组件运动,由于仿形组件安装在运动平台组件上,使得运动平台组件带动已构造出模拟地形的仿形组件运动,从而能够模拟出动态变化的仿地形;启动控制模块,地面控制单元根据模拟地形的轮廓,计算出仿地飞行数据以及光幕投影数据,地面控制单元将仿地飞行数据发送到自动飞行控制单元,自动飞行控制单元接收到仿地飞行数据后,驱动植保无人机启动工作,植保无人机飞行到预定的飞行起点,开始沿着模拟地形方向飞行;地面控制单元将光幕投影数据发送到3d全息投影通信单元,3d全息投影通信单元接收到光幕投影数据后,将光幕投影数据传输到所述3d全息投影机上,使得3d全息投影机在模拟地形上方投影出双层仿形光幕;摄影通信单元接收到无人机的启动信号后,将信息传输到高速摄影机上,使得高速摄影机启动工作,沿着植保无人机仿地飞行轨迹进行全程录像,并对植保无人机在飞行过程中与双层仿形光幕边界的位置情况进行高速摄影和记录,与此同时,摄影通信单元将摄影和记录数据实时传输到显示通信单元,显示通信单元将实时画面传输到显示器上,从而在显示器上观看植保无人机越过模拟地形的双层仿形光幕边界的情况,以便判断植保无人机的飞行精度,实现植保无人机在动态变化的仿地形上飞行时的实时可视化检测。
[0013]
本发明的一个优选方案,还包括支架,所述全息投影模块以及检测摄影模块均设置在所述支架上。
[0014]
优选地,所述支架包括升降机构以及旋转机构,其中,所述升降机构包括升降驱动电机、竖直方向上设置的线性模组以及安装在线性模组上的升降座;所述旋转机构包括安装在所述升降座上的旋转驱动电机以及安装在所述旋转驱动电机上的旋转板。
[0015]
优选地,所述旋转机构有两组,所述全息投影模块以及检测摄影模块分别安装在两组旋转机构上。
[0016]
本发明的一个优选方案,所述运动平台组件包括电机、主动带轮、从动带轮、安装在主动带轮以及从动带轮之间的传送带以及用于安装所述主动带轮以及从动带轮的机架,所述仿形组件安装在所述传送带上。
[0017]
本发明的一个优选方案,所述仿形组件包括多组上下运动机构,所述上下运动机构包括竖直方向上设置的丝杆滑台、上下驱动电机、安装在滑台上的滑台座以及安装在滑台座上的升降圆柱体。
[0018]
优选地,所述上下运动机构以点阵形式设置在传送带上。
[0019]
本发明的一个优选方案,所述双层仿形光幕的外形与模拟地形的外形一致。
[0020]
本发明的一个优选方案,所述控制模块规划仿地飞行的预设高度,所述预设高度加上往上飞行的允许误差为上层光幕的高度,所述预设高度减去往下飞行的允许误差为下层光幕的高度。
[0021]
一种植保无人机仿地飞行的可视化检测方法,其特征在于,包括以下步骤:
[0022]
(1)地形控制单元规划模拟地形,将地形数据发送至地形模拟通信单元,并将地形数据发送至仿形组件以及运动平台通信单元;
[0023]
(2)仿形组件接收地形模拟数据,模拟出模拟地形;
[0024]
(3)运动模块通过运动平台通信单元接收运动指令,驱动运动平台组件运动,带动已构造出模拟地形的仿形组件运动,形成动态变化的模拟地形;
[0025]
(4)地面控制单元根据模拟地形的轮廓,计算出仿地飞行数据及光幕投影数据,并将数据发送到自动飞行控制单元以及全息投影模块;
[0026]
(5)3d全息投影通信单元接收光幕投影数据,将光幕投影数据传输到3d全息投影机上,从而在模拟地形上方投影出双层仿形光幕,所述双层仿形光幕两层光幕之间的截面尺寸根据允许飞行误差尺寸确定;
[0027]
(6)自动飞行控制单元接收仿地飞行数据,驱动植保无人机启动,植保无人机飞行到预定的飞行起点,开始沿着模拟地形方向飞行;
[0028]
(7)检测摄影模块通过检测摄影通信单元接收到植保无人机的启动信息开始工作,沿着植保无人机仿地飞行轨迹进行全程录像,并对植保无人机在飞行过程中与模拟地形的双层仿形光幕边界的位置情况进行高速摄影和记录,并将数据传给显示模块;
[0029]
(8)显示模块通过显示通信单元接受数据,将实时画面传输到显示器上;
[0030]
(9)在显示器上观看植保无人机越过模拟地形的双层仿形光幕边界的情况,并判断植保无人机仿地飞行的飞行精度。
[0031]
本发明与现有技术相比具有以下的有益效果:
[0032]
1、本发明的植保无人机仿地飞行的可视化检测试验台,结合3d全息投影技术,可实现植保无人机飞行轨迹各项指标的可视化检测,摆脱了现有的电子信息技术检测的限制,在植保无人机飞行轨迹检测领域是一种全新的、突破式的检测方式。
[0033]
2、本发明的植保无人机仿地飞行的可视化检测试验台,使用3d全息投影技术的光幕,不但可以对无人机进行保护,更是摆脱了无人机检测场地和设备的建造,提高了无人机检测的经济性。
[0034]
3、本发明的植保无人机仿地飞行的可视化检测试验台,通过显示通信单元接收摄影通信单元发来的数据,在显示器上进行实时画面的记录,可直接在显示器上查看植保无人机与模拟地形的双层仿形光幕边界的位置情况,进而判断植保无人机沿预设轨迹飞行时的飞行精度。
[0035]
4、本发明的植保无人机仿地飞行的可视化检测试验台,包括地形模拟模块、运动模块,将地形模拟模块上的仿形组件设置在运动模块上的运动平台组件上,仿形组件构成的仿地形能够动态变化,从而实现植保无人机在动态变化的仿地形上飞行时的实时可视化检测。
附图说明
[0036]
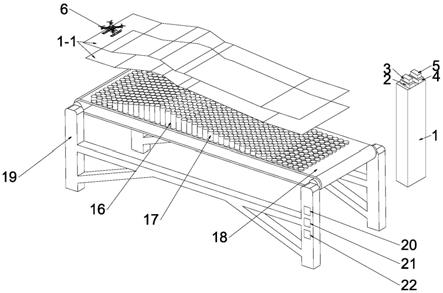
图1-图3是本发明的植保无人机仿地飞行的可视化检测试验台一个具体实施方式的结构示意图,图1是空间布置图及各功能模块图;图2是支架示意图;图3是上下运动机构示意图。
[0037]
图4是本发明的植保无人机仿地飞行的可视化检测试验台工作流程示意图。
[0038]
图5是本发明的植保无人机仿地飞行的可视化检测试验台的功能模块图。
[0039]
图6是本发明的植保无人机仿地飞行的可视化检测试验台的第二个实施例的俯视图。
[0040]
其中,1、支架;1-1、双层仿形光幕;2、3d全息投影机;3、3d全息投影通信单元;4、高速摄影机;5、摄影通信单元;6、植保无人机;7、升降驱动电机;8、线性模组;9、升降座;10、旋转驱动电机;11、旋转板;12、上下驱动电机;13、丝杆滑台;14、滑台座;15、升降圆柱体;16、仿形组件;17、上下驱动机构;18、传送带;19、机架;20、运动平台通信单元;21、地形控制单元;22、地形模拟通信单元;23、环形传送带。
具体实施方式
[0041]
下面结合实施例及附图对本发明作进一步详细的描述,但本发明的实施方式不限于此。
[0042]
实施例1
[0043]
参见图1-图5,一种植保无人机6仿地飞行的可视化检测试验台,包括全息投影模块、检测摄影模块、显示模块、用于控制无人机自动飞行的控制模块、地形模拟模块以及运动模块,其中,
[0044]
所述全息投影模块包括用于在模拟地形上的上方投影出双层仿形光幕1-1的3d全息投影机2以及3d全息投影通信单元3;所述检测摄影模块包括高速摄影机4以及摄影通信单元5;所述显示模块包括用于与所述摄影通信单元5无线连接的显示通信单元以及显示器;所述控制模块包括自动飞行控制单元以及用于规划所述双层仿形光幕1-1的地面控制单元,所述地面控制单元通过3d全息投影通信单元3与所述3d全息投影机2无线连接,所述自动飞行控制单元与地面控制单元无线连接;
[0045]
所述地形模拟模块包括用于模拟出模拟地形的仿形组件16、地形模拟通信单元22、用于规划模拟地形的地形控制单元21,所述地形控制单元21、仿形组件16均与地形模拟通信单元22无线连接;所述运动模块包括用于安装所述地形模拟模块的运动平台组件以及运动平台通信单元20,所述运动平台通信单元20与运动平台组件以及地形模拟通信单元22无线连接。
[0046]
参见图1,还包括支架1,所述全息投影模块以及检测摄影模块均设置在所述支架1上。将全息投影模块以及检测摄影模块设置在支架1上,实现固定安装,在投影以及摄影过程中,具有良好的稳定性。
[0047]
参见图2,所述支架1包括升降机构以及旋转机构,其中,所述升降机构包括升降驱动电机7、竖直方向上设置的线性模组8以及安装在线性模组8上的升降座9;所述旋转机构包括安装在所述升降座9上的旋转驱动电机10以及安装在所述旋转驱动电机10上的旋转板11。
[0048]
参见图2,所述旋转机构有两组,所述全息投影模块以及检测摄影模块分别安装在两组旋转机构上。设置上述两组旋转机构,这样,分别安装在旋转机构上的全息投影模块以及检测摄影模块能够单独旋转,增加了投影范围或者摄影范围,适应性更强。
[0049]
参见图1,所述运动平台组件包括电机、主动带轮、从动带轮、安装在主动带轮以及从动带轮之间的传送带18以及用于安装所述主动带轮以及从动带轮的机架19,所述仿形组
件16安装在所述传送带18上。设置所述结构的运动平台组件,地形模拟模块安装在传送带18上,电机驱动主动带轮转动,从而带动传送带18转动,使得地形模拟模块模拟出的仿地形处于动态变化的状态,实现植保无人机6在动态变化的仿地形上飞行时的实时可视化检测。
[0050]
参见图1和图3,所述仿形组件16包括多组上下运动机构17,所述上下运动机构17包括竖直方向上设置的丝杆滑台13、上下驱动电机12、安装在滑台上的滑台座14以及安装在滑台座14上的升降圆柱体15。设置上述仿形组件16,地形控制单元21将地形数据发送至地形模拟通信单元22,地形模拟通信单元22与仿形组件16无线连接,启动上下驱动电机12,从而使得安装在丝杆滑台13上的升降圆柱体15做升降运动,通过动态控制多组升降圆柱体15上升不同的高度,使得多组升降圆柱体15组成模拟地形,从而形成动态变化的仿地形;安装在传送带18上的仿形组件16在即将运动到传送带18下侧的一端,仿形组件16的升降圆柱体15全部下降,从而方便运转到传送带18的下侧。仿形组件16即将运动到传送带18上侧的一端,仿形组件16的升降圆柱体15再次根据地形数据上升不同高度,从而模拟出模拟地形,依次循环上述过程,实现植保无人机6在连续、动态变化的仿地形飞行时对飞行精度的实时可视化检测。
[0051]
参见图1,所述上下运动机构17以点阵形式设置在传送带18上。上下运动机构17以点阵形式设置,这样,通过单独控制每一个上下运动机构17,进而模拟出各种地形,例如,将同一列的升降圆柱体15控制为同一高度,将同一行的升降圆柱体15控制为不同高度,从而形成由升降圆柱体15顶面构成的坡形面。
[0052]
参见图1,所述双层仿形光幕1-1的外形与模拟地形的外形一致。设置上述双层仿形光幕1-1,在模拟地形的上方形成一个由双层仿形光幕1-1组成的仿地飞行空间,植保无人机6保持在仿地飞行空间内飞行,说明飞行精度满足设定要求,反之,飞行精度达不到设定要求。
[0053]
参见图1,所述控制模块规划仿地飞行的预设高度,所述预设高度加上往上飞行的允许误差为上层光幕的高度,所述预设高度减去往下飞行的允许误差为下层光幕的高度。这样,预设高度为植保无人机6的飞行高度,在显示器上观看植保无人机6在双层仿形光幕1-1内飞行,当植保无人机6越过光幕边界时,说明植保无人机6的飞行超过了飞行误差尺寸;相反,当植保无人机6在飞行过程保持在双层仿形光幕1-1内飞行时,说明植保无人机6在允许的飞行误差范围内飞行,符合飞行精度要求;另外,在需要根据技术和作业要求设定不同的飞行误差时,通过调整下层光幕到上层光幕之间的距离大小,可以灵活地适应相关检测要求。
[0054]
参见图1,在运动平台上设置模拟地形,这样,该模拟地形处于一个动态变化的过程,对应于植保无人机6在移动平台停靠时的飞行情况,例如,植保无人机6在对大面积的庄稼地进行喷药的过程中,在喷完药水需要返回加装药水时,需要降落到同样运行中的装有药水的卡车上时,地面控制单元根据移动卡车上的凸起物的形状,计算出飞行数据,并将飞行数据发送到自动飞行控制单元,自动飞行控制单元接收飞行数据,驱动植保无人机6飞行,使得植保无人机6避开移动卡车上的凸起物,从而安全降落到指定位置。
[0055]
上述植保无人机仿地飞行的可视化检测试验台的工作原理是:
[0056]
启动地形模拟模块,地形控制单元21将地形数据发送至地形模拟通信单元22,地形模拟通信单元22与仿形组件16通信连接,仿形组件16接收到地形数据模拟出模拟地形;
地形模拟通信单元22与运动平台通信单元20无线连接,通过运动平台通信单元20将运动指令发送至运动平台组件,驱动运动平台组件运动,由于仿形组件16安装在运动平台组件上,使得运动平台组件带动已构造出模拟地形的仿形组件16运动,从而能够模拟出动态变化的仿地形;启动控制模块,地面控制单元根据模拟地形的轮廓,计算出仿地飞行数据以及光幕投影数据,地面控制单元将仿地飞行数据发送到自动飞行控制单元,自动飞行控制单元接收到仿地飞行数据后,驱动植保无人机6启动工作,植保无人机6飞行到预定的飞行起点,开始沿着模拟地形方向飞行;地面控制单元将光幕投影数据发送到3d全息投影通信单元3,3d全息投影通信单元3接收到光幕投影数据后,将光幕投影数据传输到所述3d全息投影机2上,使得3d全息投影机2在模拟地形上方投影出双层仿形光幕1-1;摄影通信单元5接收到无人机的启动信号后,将信息传输到高速摄影机4上,使得高速摄影机4启动工作,沿着植保无人机6仿地飞行轨迹进行全程录像,并对植保无人机6在飞行过程中与双层仿形光幕1-1边界的位置情况进行高速摄影和记录,与此同时,摄影通信单元5将摄影和记录数据实时传输到显示通信单元,显示通信单元将实时画面传输到显示器上,从而在显示器上观看植保无人机6越过模拟地形的双层仿形光幕1-1边界的情况,以便判断植保无人机6的飞行精度,实现植保无人机6在动态变化的仿地形上飞行时的实时可视化检测。
[0057]
本发明的植保无人机仿地飞行的可视化检测方法包括以下步骤:
[0058]
(1)地形控制单元21规划模拟地形,将地形数据发送至地形模拟通信单元,并将地形数据发送至仿形组件16以及平台通信单元20;
[0059]
(2)仿形组件16接收地形模拟数据,模拟出模拟地形;
[0060]
(3)运动模块通过运动平台通信单元20接收运动指令,驱动运动平台组件运动,带动已构造出模拟地形的仿形组件16运动,形成动态变化的模拟地形;
[0061]
(4)地面控制单元根据模拟地形的轮廓,计算出仿地飞行数据及光幕投影数据,并将数据发送到自动飞行控制单元以及全息投影模块;
[0062]
(5)3d全息投影通信单元3接收光幕投影数据,将光幕投影数据传输到3d全息投影机2上,从而在模拟地形上方投影出双层仿形光幕1-1,所述双层仿形光幕1-1两层光幕之间的截面尺寸根据允许飞行误差尺寸确定;
[0063]
(6)自动飞行控制单元接收仿地飞行数据,驱动植保无人机6启动,植保无人机6飞行到预定的飞行起点,开始沿着模拟地形方向飞行;
[0064]
(7)检测摄影模块通过检测摄影通信单元5接收到植保无人机6的启动信息开始工作,沿着植保无人机6仿地飞行轨迹进行全程录像,并对植保无人机6在飞行过程中与模拟地形的双层仿形光幕1-1边界的位置情况进行高速摄影和记录,并将数据传给显示模块;
[0065]
(8)显示模块通过显示通信单元接受数据,将实时画面传输到显示器上;
[0066]
(9)在显示器上观看植保无人机6越过模拟地形的双层仿形光幕1-1边界的情况,并判断植保无人机6仿地飞行的飞行精度。
[0067]
实施例2
[0068]
参见图6,本实施例与实施例1相比的不同之处在于,所述传送带为环形传送带23。检测区域设置在环形传送带23的一侧,安装在环形传送带23上的仿形组件16跟随环形传送带23运动到检测区域的一侧时,通过动态控制多组升降圆柱体15上升不同的高度,使得多组升降圆柱体15组成模拟地形,从而形成动态变化的仿地形;在仿形组件16即将运动到环
形传送带23的另一侧时,仿形组件16的升降圆柱体15全部下降,在仿形组件16即将运动到监测区域一侧时,仿形组件16的升降圆柱体15再次根据地形数据上升不同高度,从而模拟出模拟地形;上述过程依次循环,实现植保无人机6在连续、动态变化的仿地形飞行时对飞行精度的实时可视化检测。
[0069]
上述为本发明较佳的实施方式,但本发明的实施方式并不受上述内容的限制,其他的任何未背离本发明的精神实质与原理下所作的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1