一种面向高危景区的垃圾捡拾机器人装置及工作方法与流程
[0001]
本发明涉及无人机技术领域,具体为一种面向高危景区的垃圾捡拾机器人装置及工作方法。
背景技术:
[0002]
近些年来,旅游业得到了大力发展。在闲暇时刻,人们选择去一些旅游景点参观美景、体验生活。但是游客在增多的同时,这些景区的环境压力也随之上升。越来越多的垃圾在景区出现,大大增加了景区卫生清洁工作者的工作量。一些山区景点以及高危旅游景点,由于其地势的崎岖或者是其他原因,清理这些地方的垃圾的难度直线上升,甚至工作人员无法前去清理垃圾,导致景区环境逐步变差。
[0003]
目前高危景区的清理方式多样:据调查在华山苍龙岭、东峰、西峰等悬崖峭壁处时常有景区清洁工系着安全绳、戴着安全帽在崖壁进行工作,将游客遗落的各种垃圾处理干净。这种方法首先很耗费人力,其次这种工作危险性极高,工作人员的安全无法完全得到保障。
[0004]
为改进上述缺陷,本发明设计了一种面向高危景区垃圾捡拾机器人。通过四旋翼的飞行提高垃圾清理的灵活性,采用高清摄像头识别,配合机械臂及吸盘将垃圾放置到垃圾收集仓内,使得景区垃圾清理更加智能化、安全化。
技术实现要素:
[0005]
针对上述情况,为克服现有技术的缺陷,本发明提出一种面向高危景区的垃圾捡拾机器人及工作方法,能有效解决目前对于景区内存在陡峭的斜坡、悬崖、低谷等危险系数较高地区的垃圾清理难的问题,利用四旋翼无人机与垃圾收集智能结合,配合摄像头、机械臂和吸盘等,能够将悬崖峭壁处的垃圾清理干净。
[0006]
为了实现上述目的,本发明采用如下技术方案:
[0007]
一种面向高危景区的垃圾捡拾机器人装置,包括四旋翼装置、旋翼保护装置、摄像头、机械臂模块、垃圾收集装置、无线图传模块以及主板;所述四旋翼装置固定安装在旋翼保护装置的内侧下方,主板和无线图传模块安装在四旋翼装置上,无线图传模块与地面接收器无线通讯;所述的摄像头和垃圾收集装置分别安装在四旋翼装置底部的两侧,机械臂模块安装在四旋翼装置底部的正下方;所述的无线图传模块、摄像头、机械臂模块均与主板通讯连接;
[0008]
所述四旋翼装置包括十字安装架、底部支架、飞行控制系统、电池模块、四副旋翼及其电机;所述的底部支架与十字安装架连接构成主体结构,所述的飞行控制系统和电池模块安装在主体结构上;所述的四副旋翼及其电机分别安装在十字安装架的四个端部,且每副旋翼由两片桨叶构成,所述的桨叶与电机的动力输出端相连;所述的飞行控制系统与主板通讯连接,包括飞行主控模块、定位模块和电机驱动模块;所述的电机驱动模块与电机的控制端相连,所述的飞行主控模块与地面接收器无线通讯;
[0009]
所述的摄像头通过支架云台固定在十字安装架底部的一侧,所述的支架云台安装有水平舵机和垂直舵机;
[0010]
所述的机械臂模块位于底部支架的内侧,包括自稳云台、机械臂和吸拾组件;所述的机械臂上端通过自稳云台连接在十字安装架的底部中心位置处,机械臂下端与吸拾组件连接;所述的机械臂和自稳云台通过舵机组控制,所述舵机组与主板通讯连接。
[0011]
优选的,所述的支架云台上还安装有激光测距传感器,所述激光测距传感器的激光发射方向与摄像头方向相同。
[0012]
优选的,所述的垃圾收集装置包括转接板、垃圾仓、盖板以及伸缩杆;所述的转接板固定在十字安装架底部的另一侧,所述的垃圾仓通过支撑柱固定在转接板下方;所述的盖板通过伸缩杆安装在转接板和垃圾仓之间,位于垃圾仓的正上方。
[0013]
优选的,所述旋翼保护装置包括旋翼保护支架与四块安装板;所述的四块安装板沿周向均匀布置在旋翼保护支架的内侧,每一块安装板上均设有用于连接四旋翼装置的连接孔。
[0014]
优选的,所述的旋翼保护支架为圆角矩形支架结构,圆角矩形支架的外壁尺寸大于四旋翼装置;所述的四块安装板分别安装在圆角矩形支架结构的四个圆角内侧。
[0015]
优选的,所述的机械臂模块上还设有气动控制模块,所述的舵机通过气动控制模块与主板通讯连接。
[0016]
优选的,所述的舵机组包括第一舵机、第二舵机、第三舵机、第四舵机和第五舵机,所述的第一舵机安装在自稳云台上;所述的机械臂包括第一从动臂和第二从动臂,所述的第一从动臂上端通过第二舵机与自稳云台相连;第二从动臂上端与第一从动臂下端铰接,且铰接位置处安装有第三舵机;第二从动臂下端通过第四舵机与吸拾组件连接;所述的第五舵机安装在吸拾组件上。
[0017]
优选的,所述的吸拾组件包括平板和两个由聚氨酯材料制成的吸盘;所述的平板与机械臂下端连接,平板上设置有吸盘安装孔;所述的第五舵机固定安装在平板的上表面上,吸盘固定安装在平板的下表面上,吸盘的转轴穿过吸盘安装孔与第五舵机相连。
[0018]
本发明的有益效果如下:
[0019]
(1)本发明将四旋翼无人机与垃圾收集相结合,为了实现垃圾收集,采用了一种带有盖板的垃圾仓、以及带有吸盘的机械臂。其中,机械臂通过自稳云台连接到四旋翼装置上,由于机械臂在抓取垃圾过程中将对无人机的悬停状态造成干扰,造成机身晃动,自稳云台通过对云台姿态进行调整,进而减小机械臂运动对无人机悬停状态的影响。吸盘采用聚氨酯制成,耐用性好,使用寿命较长,可以处理多种类型的垃圾;同时垃圾仓上的盖板通过伸缩杆控制打开和关闭,可以防止捡起来的垃圾掉落,减少装置的工作量,提高效率。
[0020]
(2)本发明的垃圾捡拾机器人装置的机动性高,采用了双自由度云台实现摄像头对目标垃圾最大范围的搜寻,高清摄像头将拍摄到的实时场景传回主板进行处理,无需返回地面电脑计算,使整个抓取垃圾的延时缩短;在识别到目标垃圾后可以对目标垃圾进行定位,飞行控制模块能帮助装置有效规划路线;之后将命令发送给机械臂舵机,配合激光测距,实现对目标垃圾的精准抓取。
[0021]
(3)本发明在垃圾捡拾机器人上设置了旋翼保护装置,其尺寸大于四旋翼装置,使得四旋翼装置能够完全处于旋翼保护装置内,保护旋翼不受环境的影响正常工作;同时,四
旋翼装置中的底部支架一方面起到支撑作用,另一方面,当没有到达目标垃圾处时,机械臂模块处于收缩状态,完全收缩至底部支架的内部,还保护了机械臂模块不受环境的影响正常工作,当到达目标垃圾处时,通过多种舵机配合工作,机械臂模块能够多角度伸展吸拾垃圾,可以适应在悬崖、低谷、山坡等高危的景区内进行垃圾捡拾作业。
附图说明
[0022]
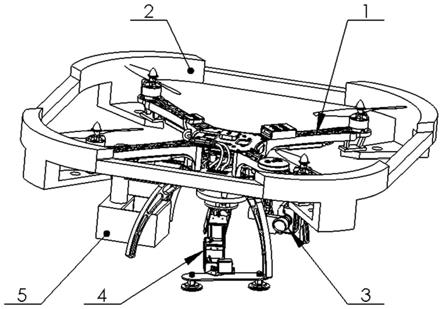
图1是整个装置的主视图;
[0023]
图2是四旋翼装置示意图;
[0024]
图3是旋翼保护装置示意图;
[0025]
图4是机械臂模块示意图;
[0026]
图5是垃圾收集装置示意图;
[0027]
图6为本发明所用的各模块示意图;
[0028]
图7是本发明的一种面向高危景区垃圾捡拾机器人的工作方法流程图;
[0029]
其中,1-四旋翼装置;2-旋翼保护装置;3-摄像头;4-机械臂模块;5-垃圾收集装置;101主板;102-飞行主控模块;103-电池;104-定位模块;105-无线图传模块;106-底部支架;107-电机;108-旋翼;201-旋翼保护支架;202-连接孔;401-第一舵机;402-气动控制模块;403-第二舵机;404-第三舵机;405-第四舵机;406-平板;407-吸盘;408-第五舵机;501-转接板;502-垃圾仓;503-伸缩杆;504-盖板。
具体实施方式
[0030]
下面结合附图对本发明进行更加详细的说明。
[0031]
为了能更清晰地说明本发明的技术特点,下面通过具体实施方案,并结合其附图,对本发明进行阐述。
[0032]
如图1所示,一种面向高危景区的垃圾捡拾机器人的装置,包括:四旋翼装置1、旋翼保护装置2、摄像头3、机械臂模块4以及垃圾收集装置5。所述四旋翼装置1固定安装在旋翼保护装置2的内侧下方,摄像头3和垃圾收集装置5分别安装在四旋翼装置1底部的两侧,机械臂模块4安装在四旋翼装置1底部的正下方。
[0033]
具体的,四旋翼装置1固定安装在旋翼保护装置2的安装板上。四旋翼装置1的正下方固定安装机械臂模块4;四旋翼装置1中部支架的左侧采用螺栓连接的方式固定安装摄像头支架,支架云台顶部为十字形结构;所述的摄像头支架顶部与四旋翼装置1之间采取螺栓螺母固定连接,摄像头支架下部用于固定安装摄像头3。优选的,所采用的摄像头为高清摄像头。高清摄像头支架上安装两个舵机,分别控制摄像头3在水平方向和垂直方向旋转,实现两个自由度的云台转动,增大摄像头的拍摄范围。四旋翼装置1中部支架的右侧用螺栓螺母固定安装垃圾收集装置5。优选的,在所述的支架云台上还安装有激光测距传感器,激光测距传感器的激光发射方向与摄像头方向相同,用于获取高度信息,结合目标垃圾的二维平面位置得到三维位置。
[0034]
如图2所示,四旋翼装置1采取四轴式结构,包括十字安装架、底部支架106、飞行控制系统、电池模块、四副旋翼108及其电机,四副旋翼108在同一水平面上,所述的底部支架106与十字安装架连接构成主体结构。在本发明的一项具体实施中,旋翼108采用半无铰式
旋翼,每副旋翼都是两片式桨叶。桨叶固定在电机107的输出轴上;四旋翼装置1的下方安装固定电池103,作为整个装置的电力输出。
[0035]
所述的飞行控制系统包括主板101、飞行主控模块102、无线图传模块105和定位模块104;所述的飞行主控模块102和无线图传模块105安装在主板101上,摄像头3与主板101通讯连接;所述的飞行主控模块102分别与电机107和定位模块104相连,且所述的飞行主控模块102、无线图传模块105与地面接收器无线通讯。其具体安装位置为:电池103的附近安装一个无线图传模块105;四旋翼装置1的上方固定jetson nano控制主板101和飞行主控模块102,其右侧支架用于安装定位模块104,用于记录整个装置的飞行轨迹以及确定装置的地理位置。
[0036]
如图3所示,旋翼保护装置2外侧为正方形的旋翼保护支架201,旋翼保护支架201的外壁尺寸大于四旋翼装置1,使得四旋翼装置能够完全处于旋翼保护装置内,保护旋翼不受环境的影响正常工作。旋翼保护支架201的内侧为四块安装板,每块安装板上设置一个用于连接四旋翼装置1的连接孔202。旋翼保护支架201的外壳采用圆角处理,所述的四块安装板分别安装在四个圆角内侧,增大整个装置的安全性。
[0037]
如图4所示,机械臂模块4包括自稳云台、舵机、吸拾组件以及机械臂。所述的自稳云台安装在机械臂与四旋翼装置1的连接处(图中省略),机械臂在抓取垃圾过程中,将对无人机的悬停状态造成干扰,造成机身晃动,自稳云台通过对云台姿态进行调整,进而减小机械臂运动对无人机悬停状态的影响,减少机械臂在工作时对无人机的姿态造成干扰。自稳云台下面有四根支撑柱以及两个圆板,圆板与圆板之间用四根支撑柱支撑,中间固定安装一个气动控制模块402与第一舵机401。所述的机械臂由两节从动臂构成。上节从动臂的上端通过连接件固定在自稳云台下方,连接件上固定舵机第二403,用于控制上节从动臂的翻转,允许转动角度为180度。两节从动臂之间采用活动连接,连接处固定一个第三舵机404,用于控制下节从动臂的翻转,可允许翻转角度为270度。下节从动臂的下端与吸拾组件之间通过第四舵机405连接,所述的第四舵机405用于控制吸拾组件上下转动,可允许转动的角度为270度。
[0038]
在本发明的一项具体实施中,所述的吸拾组件包括平板406、第五舵机408和两个吸盘407;所述的平板406与下节从动臂的下端连接,两个吸盘407分别对称固定安装在平板406下表面的左右两侧。第五舵机408固定安装在平板上表面的中部,用于控制吸盘407的工作。具体的,平板406上设置有两个吸盘安装孔,吸盘的转轴穿过吸盘安装孔后与第五舵机408的舵盘连接,实现第五舵机408带动吸盘翻转。
[0039]
所述的机械臂模块4上还安装有用于控制舵机的气动控制模块(402),所述的气动控制模块与飞行主控模块相连。
[0040]
如图5所示,垃圾收集装置5包括转接板501、垃圾仓502、盖板504以及伸缩杆503。伸缩杆503连接转接板501与盖板504,所述的盖板504位于转接板501和垃圾仓502之间,位于垃圾仓的正上方,通过伸缩杆503伸缩控制垃圾收集装置5的盖板504的闭合。在本发明的一项具体实施中,垃圾仓502为中空的长方体,用于储藏被捡拾的垃圾,转接板501与垃圾仓502之间用一根支撑柱相连接。
[0041]
图6为本发明所用的各模块系统框图:包括嵌入式开发控制系统和飞行控制系统。所述的嵌入式开发控制系统利用jetson nano主板进行开发,无线图传模块105、摄像头3、
机械臂舵机、自稳云台舵机直接与主板通讯连接;飞行控制系统用于实现无人机飞行控制,主要包括飞行主控模块、定位模块和电机驱动模块,飞行控制系统与主板之间也能够实现通讯。在本发明的一项具体实施中,所述飞行控制系统通过气压计及内置imu实现姿态与高度的校准。所述定位模块通过gps及指南针进行校准。通过飞行控制系统、定位模块配合电机驱动模块实现带动无人机进行运动,且能够保证飞机在空中实现精准悬停,为主板实现垃圾识别、机械精准抓取打下了良好的基础。优选的,所述的主板利用ssd mobilenet v1模型对图像进行训练识别。在主板读取到摄像头信息进行处理后,通过图传模块传给地面电脑端或手机端,可在地面端对图像进行实时查看,实现地面人工可视化。
[0042]
在本发明的一项具体实施中,所述的主板采用jetson nano控制主板,主板从高清摄像头中通过opencv读取视频流,利用控制板内gpu进行运算,对目标垃圾进行特征提取及目标检测,通过jetson nano控制主板自身的算力可实现对目标垃圾进行检测,无需返回地面电脑计算,使整个抓取垃圾的延时缩短。
[0043]
图7是本发明一种面向高危景区垃圾捡拾机器人的工作方法:
[0044]
在无人机起飞之后,高清摄像头3对地面目标垃圾进行实时捕捉,如果目标视野中出现目标垃圾,则执行目标垃圾检测的操作,如果目标视野中未出现垃圾目标,则无人机继续飞行,直至检测到目标垃圾。
[0045]
在检测到目标垃圾后,主板101对图像进行目标检测及特征提取后,若检测目标的准确率高于80%,则在主板中对其进行框选,可得到其在二维平面中图像的中心坐标点,若目标检测率低于80%,则无人机继续飞行。
[0046]
进一步,当检测目标的准确率高于80%时,主板101计算出此时被检测目标的中心点,配合激光测距将二位平面转换为三维世界中的坐标点,之后将坐标点发送至气动控制模块402,用于控制机械臂舵机工作,使得机械臂带动吸盘,对目标垃圾进行精准收集,最后送入垃圾仓,完成垃圾收集。
[0047]
在主板101完成对目标的检测后,并驱动机械臂带动吸盘对目标垃圾进行收集时,一系列动作均通过主板进行处理,无需返回地面电脑计算无线图传模块可将视频流发回至地面端(手机端或电脑端),可实时查看垃圾检测及回收的情况。
[0048]
更具体的,可将工作方法划分为以下步骤:
[0049]
s1,划定高危景区的垃圾捡拾区域范围,控制垃圾捡拾机器人装置在高危景区的预设区域范围内飞行,此时机械臂模块4收缩至底部支架106的内部;
[0050]
s2,所述摄像头3在双自由度的支架云台上实时采集景区图像,并将视频流传输至主板101进行图像识别,同时将视频流通过无线图传模块105传输至地面端;
[0051]
s3,通过主板101中的预训练识别算法对收到的图像进行实时检测,当检测到目标垃圾且识别准确率高于80%时,框选目标垃圾的二维平面位置并得到二维坐标值,进入步骤s4;否则,重复步骤s2至s3;
[0052]
s4,固定摄像头3的角度,同时结合激光测距获得目标垃圾的实时三维坐标值;主板101根据三维坐标值和定位模块104获取的实时位置规划目标路线并传输至飞行主控模块102,控制垃圾捡拾机器人装置沿目标路线飞行;
[0053]
s5,当目标垃圾的三维坐标与垃圾捡拾机器人装置的距离低于阈值后,主板发送位置信号到气动控制模块402,气动控制模块402控制第一舵机、第二舵机、第三舵机、第四
舵机和第五舵机配合工作,通过吸盘407吸取垃圾,并将垃圾放入垃圾仓502中,关闭垃圾仓上的盖板504,完成目标垃圾的收集;
[0054]
s6、垃圾捡拾机器人装置根据预设路线或者地面端的控制,重复步骤s2至s5,实现高危景区预设区域范围的垃圾捡拾工作。
[0055]
所述垃圾捡拾机器人装置的飞行路线控制程序预先存储在飞行主控模块102中,且能够通过地面端对飞行路线进行修改。
[0056]
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1