一种新型飞机除冰液喷洒作业方法及装置与流程
1.本申请涉及民用机场飞机除冰领域,具体为一种新型飞机除冰液喷洒作业方法及装置。
背景技术:
2.当前机场对飞机喷洒除冰液主要通过除冰车实现。除冰车使用机械臂将作业人员和喷头升至空中,通过人工操作机械臂和喷头,进行除冰液喷洒作业。这种方式高度依赖人工。受作业人员技术水平和专注程度影响,喷洒停留难以准确控制,除冰液使用量往往存在一定浪费;除冰车辆频繁围绕飞行器移动,存在刮蹭飞行器风险;同时,除冰作业人员在除冰车机械臂末端操作舱内进行高空作业,对机械臂和车辆稳定性均有更高的要求,增加了设备成本。
3.现有技术中如专利cn201920140814.3 可独立升降操作舱的飞机除冰车,公开了一种可独立升降操作舱的飞机除冰车,包括汽车底盘、辅梁总成、高空臂机构、操作舱、水路控制系统、液压控制系统和旋转喷洒机构,操作舱内设有控制系统,辅梁总成上设有臂回转机构和操作舱机构,臂回转机构上设有高空臂机构,臂回转机构下端与辅梁总成相连接,上端与高空臂机构相铰接,高空臂机构包括下臂、上臂和举升液缸,上臂上设有旋转喷洒机构,操作舱机构包括操作舱和升降机构,升降机构上端面与操作舱底面固定连接,下端与汽车底盘的车架固定连接,操作舱内设有显示屏、喷洒操作手柄和高空臂操作手柄。上述专利虽可实现除冰液的喷洒作业,但车辆须频繁围绕飞行器移动,存在刮蹭飞行器安全隐患,且作业人员位于操作舱内高空作业,对机械结构的稳固性要求极高。
4.再如专利cn201210066297.2 智能式飞机除冰喷洒系统,公开了一种智能式飞机除冰喷洒系统,其技术特点是:包括移动式除冰机械臂和智能检测系统、指挥控制系统、除冰液储存及回收处理系统、除冰液加热供给系统,指挥控制系统分别与智能检测系统、除冰液储存及回收处理系统和除冰液加热供给系统相连接;除冰液加热供给系统与除冰液储存及回收处理系统相连接;除冰液加热供给系统与移动式除冰机械臂相连接。其发明在机场内建立专用除冰作业区并控制轨道上的除冰机械臂为飞机喷洒除冰液,能够根据不同机型自动调节除冰机械臂的位置和高度,自动调整喷洒压力和流量。但除冰机械臂需要在轨道上进行移动,对机械臂的稳固性要求极高,并且该专利未提供明确的作业方法。
技术实现要素:
5.为解决现有除冰设备存在的上述问题,解决除冰过程中安全性风险,本申请现提出了一种新型飞机除冰液喷洒作业方法及装置,在提高装置的运行安全性同时,提高除冰作业的效率,减少除冰液使用量。
6.为实现上述技术效果,本申请技术方案如下:一种新型飞机除冰液喷洒装置,其特征在于:包括除冰液存储箱、机械臂、供电及控制系统和远程操作系统;所述除冰液存储箱与机械臂的供液管连通,供电及控制系统与除冰
液存储箱连通,远程操作系统与供电及控制系统连通。进一步地,所述机械臂包括基座,所述基座上设置有立柱,立柱顶端安装有转台,所述转台上设置有伸缩臂,所述伸缩臂末端设置有喷头,所述喷头周围设置有探头和监视器。
7.再进一步地,所述供液管沿立柱及伸缩臂分布,且所述供液管的两端分别与除冰液存储箱和喷头连通。
8.再进一步地,所述监视器和探头与供电及控制系统连接。
9.进一步地,机械臂的基座安装在基础台上,所述除冰液存储箱、供电及控制系统、基础台布置在定点除冰坪相邻除冰机位之间;所述远程操作系统布置在除冰指挥塔台,通过无线通讯信号与供电及控制系统连接。
10.再进一步地,所述无线通讯信号为5g信号。
11.进一步地,所述除冰液存储箱包括用于两个独立的存储空间,两个独立的存储空间用于存储i型飞机除冰液和ii(iv)型飞机防冰液;其中至少一个存储空间内设置有燃油循环加热器,可用于存储i型飞机除冰液。
12.进一步地,所述伸缩臂包括位于前端的伸缩式臂段与末端的折叠式臂段。
13.进一步地,所述远程操作系统包括控制器,所述控制器与第一无线数据传输模块相连,所述控制器设置有操作按钮和操作摇杆。
14.进一步地,所述现场供电及控制系统包括plc,所述plc通过通讯接口与第二无线数据传输模块信号相连,所述无线数据传输模块与监视器信号相连,所述plc通过通讯总线与供液系统、探头、喷头和机械臂信号相连。plc的信号输入输出为数字量输入和数字量输出,所述供液系统包括除冰液存储箱中的供液泵组以及管路。
15.一种新型飞机除冰液喷洒作业方法,包括如下步骤:在定点除冰机位两侧的安全间隙,布置有2~4台除冰装置,相邻两个除冰机位之间的除冰装置旋转角度公用。
16.a1:飞机i、ii、iv型除冰液通过除冰液转运罐车加注至除冰液存储箱内分别存储;其中i型飞机除冰液在存储空间内通过燃油循环加热器加热至60-80℃,ii、iv型液无需加热,伸缩臂处于除冰准备姿态;a2:飞行器进入指定除冰位置,远程操作系统通过无线信号将指令传输至供电及控制系统,控制伸缩臂按设定的姿态进行旋转和伸缩,并通过监视器、探头进行反馈;a3:在伸缩臂达到除冰起点姿态后,远程操作系统通过无线信号传输指令至供电及控制系统,控制除冰液存储箱的i型、ii型或iv型供液泵,将除冰液泵送至喷头处,通过监视器监控除冰液喷洒状态,直至伸缩臂达到除冰终点姿态后,除冰液存储箱供液泵停止工作;a4:伸缩臂从除冰终点姿态逆向返回除冰起点姿态,并通过监视器监控判断除冰效果,对局部不合格处,暂停伸缩臂动作,通过远程操作系统控制除冰液存储箱供液泵,进行局部除冰液喷洒;a5:除冰效果满足要求后,伸缩臂收缩、旋转返回除冰准备姿态。
17.进一步地,设定的姿态具体包括准备姿态,起点姿态和终点姿态,其中准备姿态为:伸缩臂的伸缩式臂段位于最小收缩长度,末端折叠式臂段位于上翘位置,所述伸缩臂最末端一段为可旋转角度的折叠臂,其余段均为伸缩式臂段,并且伸缩臂应与飞行器机身平行。
18.起点姿态为:伸缩臂整体由平行机身位置旋转至与机身呈预设角度位置;伸缩式臂段伸展至预设长度;伸缩臂的末端折叠式臂段旋转至下垂位置,喷洒点位于大翼翼尖;终点姿态为:伸缩臂通过预设的伸展长度、角度,预设折叠臂旋转角度,达到喷洒点位于大翼机身连接处或水平尾翼、垂尾处;本申请的有益效果:1、本发明使用固定式机械臂搭载监视器、探头的设计,机械臂末端不再负载作业人员因而大幅降低了机械臂强度要求,降低设备成本。同时,结合远程控制技术和5g技术,针对不同机型,机械臂可按设定程序进行动作,以最优行径路线和速度进行除冰液精确喷洒,效率高、时间可控,同时也节约了除冰液用量。
19.2、本申请通过除冰液喷洒装置的明确布置,安装固定于定点除冰坪相邻除冰机位安全间隙,采用固定式机械臂结构,并通过伸缩式和折叠式机械臂进行组合,设置监视器和探头,解决了移动式除冰车和轨道移动式机械臂,因频繁移动存在的刮蹭飞行器安全风险,在保障安全运行的前提下减少现场操作人员数量,节约人力成本。相邻除冰机位间的除冰液喷洒装置旋转公用,大幅节约设备投资成本。
20.3、本申请采用了远程操作系统,通过5g信号传输技术,程序化控制现场机械作业,并通过监视器和探头保障和飞行器的安全距离,通过程序化的机械动作提高操作的准确性,降低除冰液的使用量,提高除冰效率。
附图说明
21.图1为本申请一种新型飞机除冰液喷洒设备e类除冰机位设备布置示意图。
22.图2为本申请一种新型飞机除冰液喷洒设备c类除冰机位设备布置示意图。
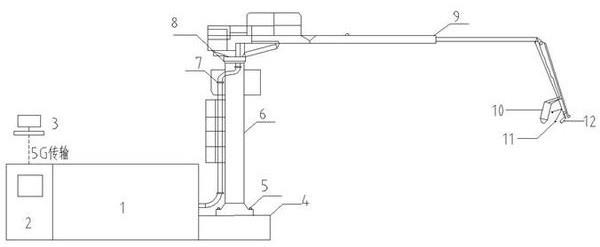
23.图3为本申请一种新型飞机除冰液喷洒装置设备组成示意图。
24.图4为现场的供电及控制系统结构图。
25.图5为远程的操作器结构示意图。
26.附图中:1-除冰液存储箱,2-供电及控制系统,3-远程操作系统,4-基础台,5-基座,6-立柱,7-供液管,8-转台,9-伸缩臂,10-监视器,11-探头,12-喷头。
具体实施方式
27.下面结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整的描述。显然,所描述的实施例仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,均属于本发明保护的范围。
28.实施例1如图1所示,一种新型飞机除冰液喷洒装置,e类飞机除冰装置布置于相邻定点除冰坪之间的安全间隙,相邻除冰坪之间的除冰液喷洒装置旋转公用。
29.如图2所示,一种新型飞机除冰液喷洒装置,c类飞机除冰装置布置于相邻定点除冰坪之间的安全间隙,相邻除冰坪之间的除冰液喷洒装置旋转公用。
30.一种新型飞机除冰液喷洒作业方法,包括如下步骤:
a1: 飞机i、ii、iv型除冰液通过除冰液转运罐车加注至除冰液存储箱(1)内分别存储; 其中i型飞机除冰液在存储空间内通过燃油循环加热器加热至60-80℃,ii、iv型液无需加热伸缩臂(9)处于除冰准备姿态。
31.a2:飞行器进入指定除冰位置,远程操作系统(3)工作,通过5g信号传输至供电及控制系统 (2),控制伸缩臂(9)按设定的姿态进行旋转和伸缩,并通过监视器(10)、 探头(11)进行反馈。
32.a3:在伸缩臂(9)达到除冰起点姿态后,远程操作系统(3)工作,通过5g信号传输至供电及控制系统 (2),控制除冰液存储箱(1)供液泵,将除冰液泵送至喷头处,流量≥200l/min,压力≥1.1mpa,通过监视器(10)监控除冰液喷洒状态,直至伸缩臂(9)达到除冰终点姿态后,除冰液存储箱(1)供液泵停止工作。
33.a4:伸缩臂(9)从除冰终点姿态逆向返回除冰起点姿态,并通过监视器(10)监控判断除冰效果,对局部不合格处,暂停伸缩臂(9)动作,通过远程操作系统(3)控制除冰液存储箱(1)供液泵,进行局部除冰液喷洒。
34.a5:除冰效果满足要求后,伸缩臂(9)收缩、旋转返回除冰准备姿态。
35.如图3所示,一种新型飞机除冰液喷洒装置:包括一个除冰液存储箱,一个机械臂,一个供电及控制系统,一个远程操作系统;所述除冰液存储箱与机械臂供液管道连通,供电及控制系统与除冰液存储箱连通,远程操作系统与供电及控制系统连通。
36.实施例2一种新型飞机除冰液喷洒装置包括除冰液存储箱、机械臂、供电及控制系统和远程操作系统;所述除冰液存储箱与机械臂的供液管连通,供电及控制系统与除冰液存储箱连通,远程操作系统与供电及控制系统连通。现有的除冰液喷洒装置,均采用人工现场操作,其操作人员包含车辆驾驶人员,液体喷洒操作人员,现场监护运行人员。此种作业方法的弊端在于现有除冰喷洒装置作业范围小,车辆驾驶人员必须行驶车辆频繁围绕飞行器移动,液体喷洒操作人员位于升高舱内,人员高空作业安全风险大,一旦车辆失稳存在倾翻、刮蹭飞行器风险,同时作业需要3名现场作业人员。 而本申请的除冰喷洒装置为固定式,采用伸缩式机械臂,结构稳固,作业范围更大,减少了设备刮蹭飞行器风险。采用远程操作系统,包含摇杆操作模块、按钮操作模块、无线传输模块,通过5g信号将远程控制室中人员的操作指令送至现场装置的5g信号接收器,并将电信号转化为装置的机械动作。仅需1名操作人员通过摇杆或按钮进行操作,大幅降低劳动力,改善人员恶劣的低温、高空作业环境,人员通过本专利装置配备高清摄像头及图像处理技术,可在远程操作系统的画面上监视除冰作业全景;同时装置配备有距离感应探头,可实时监测与提示设备与飞行器的间距,避免刮蹭飞行器。
37.机械臂包括基座,所述基座上设置有立柱,立柱顶端安装有转台,所述转台上设置有伸缩臂,所述伸缩臂末端设置有喷头,所述喷头周围设置有探头和监视器。供液管沿立柱及伸缩臂分布,且所述供液管的两端分别与除冰液存储箱和喷头连通。监视器和探头与供电及控制系统连接。
38.机械臂的基座安装在基础台上,所述除冰液存储箱、供电及控制系统、基础台布置在定点除冰坪相邻除冰机位之间;所述远程操作系统布置在除冰指挥塔台,通过无线通讯信号与供电及控制系统连接。无线通讯信号可为5g信号。
39.除冰液存储箱包括用于两个独立的存储空间,两个独立的存储空间用于存储i型
飞机除冰液和ii(iv)型飞机防冰液;其中至少一个存储空间内设置有燃油循环加热器,可用于存储i型飞机除冰液。伸缩臂包括位于前端的伸缩式臂段与末端的折叠式臂段。
40.远程操作系统包括控制器,所述控制器与第一无线数据传输模块相连,所述控制器设置有操作按钮和操作摇杆。
41.现场供电及控制系统包括plc,所述plc通过通讯接口与第二无线数据传输模块信号相连,所述无线数据传输模块与监视器信号相连,所述plc通过通讯总线与供液系统、探头、喷头和机械臂信号相连。plc的信号输入输出为数字量输入和数字量输出,所述供液系统包括除冰液存储箱中的供液泵组以及管路。
42.安装于机械臂上的监视器,通过第二无线数据传输模块,将图像信号传输至plc通讯接口或远程操作器的第一无线数据传输模块,最终传输至远程操作器的操作器中进行图像处理,并显示;机械臂、探头、 喷头的状态信息通过电信号传输至plc,经运算处理后由plc输出信号,通过无线数据传输模块将信号传输至远程操作器的操作器中并显示;远程操作器中的按钮操作、摇杆操作电信号,通过操作器处理后,经5g无线数据传输模块,传输至现场plc的5g无线数据传输模块接收,并经过plc运算输出数字量信号至机械臂、喷头、供液系统,起到控制机械臂、喷头、供液系统泵组的动作。
43.实施例3一种新型飞机除冰液喷洒作业方法,包括如下步骤:在定点除冰机位两侧的安全间隙,布置有2~4台除冰装置,相邻两个除冰机位之间的除冰装置旋转角度公用;为防止机械臂本体断裂导致刮蹭,装置作业过程中的动作应尽量避免在飞行器上部掠过,本方法可通过在c类飞行器两侧各设置1台,e类飞行器两侧各设置2台布置,既实现了喷洒作业范围的全面覆盖,又解决了安全风险问题。
44.a1:飞机i、ii、iv型除冰液通过除冰液转运罐车加注至除冰液存储箱内分别存储;其中i型飞机除冰液在存储空间内通过燃油循环加热器加热至60-80℃,ii、iv型液无需加热,伸缩臂处于除冰准备姿态;a2:飞行器进入指定除冰位置,远程操作系统通过无线信号将指令传输至供电及控制系统,控制伸缩臂按设定的姿态进行旋转和伸缩,并通过监视器、探头进行反馈;a3:在伸缩臂达到除冰起点姿态后,远程操作系统通过无线信号传输指令至供电及控制系统,控制除冰液存储箱的i型、ii型或iv型供液泵,将除冰液泵送至喷头处,通过监视器监控除冰液喷洒状态,直至伸缩臂达到除冰终点姿态后,除冰液存储箱供液泵停止工作;a4:伸缩臂从除冰终点姿态逆向返回除冰起点姿态,并通过监视器监控判断除冰效果,对局部不合格处,暂停伸缩臂动作,通过远程操作系统控制除冰液存储箱供液泵,进行局部除冰液喷洒;a5:除冰效果满足要求后,伸缩臂收缩、旋转返回除冰准备姿态。
45.设定的姿态具体包括准备姿态,起点姿态和终点姿态,其中准备姿态为:伸缩臂的伸缩式臂段位于最小收缩长度,末端折叠式臂段位于上翘位置,所述伸缩臂最末端一段为可旋转角度的折叠臂,其余段均为伸缩式臂段,并且伸缩臂应与飞行器机身平行,此状态的目的是避免飞行器进入指定位置时从机械臂下方滑入,避免安全风险;起点姿态为:伸缩臂整体由平行机身位置旋转至与机身呈预设角度位置;伸缩式臂段
伸展至预设长度;伸缩臂的末端折叠式臂段旋转至下垂位置,喷洒点位于大翼翼尖;终点姿态为:伸缩臂通过预设的伸展长度、角度,预设折叠臂旋转角度,达到喷洒点位于大翼机身连接处或水平尾翼、垂尾处;本申请中出现的预设角度位置、预设伸长长度以及预设折叠臂旋转角度等是指针对具体机型飞机尺寸所预先设定的参数,不同的飞机具体参数有所不同,此参数为本领域技术人员可以根据实际情况进行调整的。
46.实施例4一种新型飞机除冰液喷洒作业方法,包括如下步骤:在定点除冰机位两侧的安全间隙,布置有2~4台除冰装置,相邻两个除冰机位之间的除冰装置旋转角度公用;为防止机械臂本体断裂导致刮蹭,装置作业过程中的动作应尽量避免在飞行器上部掠过,本方法可通过在c类飞行器两侧各设置1台,e类飞行器两侧各设置2台布置,既实现了喷洒作业范围的全面覆盖,又解决了安全风险问题。
47.a1:飞机i、ii、iv型除冰液通过除冰液转运罐车加注至除冰液存储箱内分别存储;其中i型飞机除冰液在存储空间内通过燃油循环加热器加热至60-80℃,ii、iv型液无需加热,伸缩臂处于除冰准备姿态;a2:飞行器进入指定除冰位置,远程操作系统通过无线信号将指令传输至供电及控制系统,控制伸缩臂按设定的姿态进行旋转和伸缩,并通过监视器、探头进行反馈;a3:在伸缩臂达到除冰起点姿态后,远程操作系统通过无线信号传输指令至供电及控制系统,控制除冰液存储箱的i型、ii型或iv型供液泵,将除冰液泵送至喷头处,通过监视器监控除冰液喷洒状态,直至伸缩臂达到除冰终点姿态后,除冰液存储箱供液泵停止工作;a4:伸缩臂从除冰终点姿态逆向返回除冰起点姿态,并通过监视器监控判断除冰效果,对局部不合格处,暂停伸缩臂动作,通过远程操作系统控制除冰液存储箱供液泵,进行局部除冰液喷洒;a5:除冰效果满足要求后,伸缩臂收缩、旋转返回除冰准备姿态。
48.设定的姿态具体包括准备姿态,起点姿态和终点姿态,其中准备姿态为:伸缩臂的伸缩式臂段位于最小收缩长度,末端折叠式臂段位于上翘位置,所述伸缩臂最末端一段为可旋转角度的折叠臂,其余段均为伸缩式臂段,并且伸缩臂应与飞行器机身平行,此状态的目的是避免飞行器进入指定位置时从机械臂下方滑入,避免安全风险;起点姿态为:伸缩臂整体由平行机身位置旋转至与机身呈预设角度位置;伸缩式臂段伸展至预设长度;伸缩臂的末端折叠式臂段旋转至下垂位置,喷洒点位于大翼翼尖;终点姿态为:伸缩臂通过预设的伸展长度、角度,预设折叠臂旋转角度,达到喷洒点位于大翼机身连接处或水平尾翼、垂尾处;本申请中出现的预设角度位置、预设伸长长度以及预设折叠臂旋转角度等是指针对具体机型飞机尺寸所预先设定的参数,不同的飞机具体参数有所不同,此参数为本领域技术人员可以根据实际情况进行调整的。
49.一种新型飞机除冰液喷洒装置包括除冰液存储箱、机械臂、供电及控制系统和远程操作系统;所述除冰液存储箱与机械臂的供液管连通,供电及控制系统与除冰液存储箱连通,远程操作系统与供电及控制系统连通。现有的除冰液喷洒装置,均采用人工现场操
作,其操作人员包含车辆驾驶人员,液体喷洒操作人员,现场监护运行人员。此种作业方法的弊端在于现有除冰喷洒装置作业范围小,车辆驾驶人员必须行驶车辆频繁围绕飞行器移动,液体喷洒操作人员位于升高舱内,人员高空作业安全风险大,一旦车辆失稳存在倾翻、刮蹭飞行器风险,同时作业需要3名现场作业人员。 而本申请的除冰喷洒装置为固定式,采用伸缩式机械臂,结构稳固,作业范围更大,减少了设备刮蹭飞行器风险。采用远程操作系统,包含摇杆操作模块、按钮操作模块、无线传输模块,通过5g信号将远程控制室中人员的操作指令送至现场装置的5g信号接收器,并将电信号转化为装置的机械动作。仅需1名操作人员通过摇杆或按钮进行操作,大幅降低劳动力,改善人员恶劣的低温、高空作业环境,人员通过本专利装置配备高清摄像头及图像处理技术,可在远程操作系统的画面上监视除冰作业全景;同时装置配备有距离感应探头,可实时监测与提示设备与飞行器的间距,避免刮蹭飞行器。
50.机械臂包括基座,所述基座上设置有立柱,立柱顶端安装有转台,所述转台上设置有伸缩臂,所述伸缩臂末端设置有喷头,所述喷头周围设置有探头和监视器。供液管沿立柱及伸缩臂分布,且所述供液管的两端分别与除冰液存储箱和喷头连通。监视器和探头与供电及控制系统连接。
51.机械臂的基座安装在基础台上,所述除冰液存储箱、供电及控制系统、基础台布置在定点除冰坪相邻除冰机位之间;所述远程操作系统布置在除冰指挥塔台,通过无线通讯信号与供电及控制系统连接。无线通讯信号可为5g信号。
52.除冰液存储箱包括用于两个独立的存储空间,两个独立的存储空间用于存储i型飞机除冰液和ii(iv)型飞机防冰液;其中至少一个存储空间内设置有燃油循环加热器,可用于存储i型飞机除冰液。伸缩臂包括位于前端的伸缩式臂段与末端的折叠式臂段。
53.远程操作系统包括控制器,所述控制器与第一无线数据传输模块相连,所述控制器设置有操作按钮和操作摇杆。
54.现场供电及控制系统包括plc,所述plc通过通讯接口与第二无线数据传输模块信号相连,所述无线数据传输模块与监视器信号相连,所述plc通过通讯总线与供液系统、探头、喷头和机械臂信号相连。plc的信号输入输出为数字量输入和数字量输出,所述供液系统包括除冰液存储箱中的供液泵组以及管路。
55.安装于机械臂上的监视器,通过第二无线数据传输模块,将图像信号传输至plc通讯接口或远程操作器的第一无线数据传输模块,最终传输至远程操作器的操作器中进行图像处理,并显示;机械臂、探头、 喷头的状态信息通过电信号传输至plc,经运算处理后由plc输出信号,通过无线数据传输模块将信号传输至远程操作器的操作器中并显示;远程操作器中的按钮操作、摇杆操作电信号,通过操作器处理后,经5g无线数据传输模块,传输至现场plc的5g无线数据传输模块接收,并经过plc运算输出数字量信号至机械臂、喷头、供液系统,起到控制机械臂、喷头、供液系统泵组的动作。
56.本发明使用固定式机械臂搭载监视器、探头的设计,机械臂末端不再负载作业人员因而大幅降低了机械臂强度要求,降低设备成本。同时,结合远程控制技术和5g技术,针对不同机型,机械臂可按设定程序进行动作,以最优行径路线和速度进行除冰液精确喷洒,效率高、时间可控,同时也节约了除冰液用量。本申请通过除冰液喷洒装置的明确布置,安装固定于定点除冰坪相邻除冰机位安全间隙,采用固定式机械臂结构,并通过伸缩式和折
叠式机械臂进行组合,设置监视器和探头,解决了移动式除冰车和轨道移动式机械臂,因频繁移动存在的刮蹭飞行器安全风险,在保障安全运行的前提下减少现场操作人员数量,节约人力成本。相邻除冰机位间的除冰液喷洒装置旋转公用,大幅节约设备投资成本。本申请采用了远程操作系统,通过5g信号传输技术,程序化控制现场机械作业,并通过监视器和探头保障和飞行器的安全距离,通过程序化的机械动作提高操作的准确性,降低除冰液的使用量,提高除冰效率。
57.在本申请的描述中,需要说明的是,术语“上”、“竖直”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该申请产品使用时惯常摆放的方位或位置关系,或者是本领域技术人员惯常理解的方位或位置关系,仅是为了便于描述本申请和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本申请的限制。此外,术语“第一”、“第二”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
58.在本申请的描述中,还需要说明的是,除非另有明确的规定和限定,术语“设置”、“安装”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本申请中的具体含义。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1