一种空间驱动机构及驱动系统的制作方法
1.本发明涉及航天器驱动技术领域,尤其涉及一种用于航天器的空间驱动机构及驱动系统。
背景技术:
2.随着航天技术的发展,特别是随着载人航天和深空探测技术的发展,空间飞行器机构的具体功能正在不断变化、发展和扩大,其构造日趋复杂,功能也不断增加,而各种功能及各种任务则需要采取各种机构来执行及完成。空间驱动机构作为航天器的核心部件,通常是由电机、减速器、轴系以及位置传感器等部件通过机电一体化设计完成的。然而在航天应用中,一般电机的寿命在几十万转到一百万转之间,使得航天器的寿命也受到影响,导致其运行成本增加。
技术实现要素:
3.本发明的目的在于提供一种空间驱动机构及驱动系统,通过在空间驱动机构中设置双驱动电路及双绕组以及在驱动系统中设置双驱动模块,提高了空间驱动机构及驱动系统的可靠性。
4.为了达到上述目标,本发明通过以下技术方案实现:
5.一种空间驱动机构,包括:
6.支架;
7.至少两个驱动电路,均设置于航天器的控制系统中;
8.驱动电机,其包括至少两个绕组;所述驱动电机设置于所述支架上,分别与所述驱动电路和所述航天器的负载平台进行连接;所述驱动电机加电后用于带动所述负载平台及固定于所述负载平台上的负载转动至预设角度。
9.优选地,所述驱动电机还包括:
10.壳体,设置于所述支架的第一端;
11.转轴,其第一端通过轴承固定于所述壳体上,第二端与所述负载平台进行连接;所述转轴用于通过旋转带动所述负载平台连接转动至所述预设角度。
12.优选地,至少两个所述绕组分别为第一绕组和第二绕组,且所述第一绕组和所述第二绕组分别设置于所述壳体内壁上;
13.至少两个所述驱动电路分别为第一驱动电路和第二驱动电路;
14.所述第一驱动电路与所述第一绕组进行连接;所述第一绕组加电后用于驱动所述转轴进行旋转;
15.所述第二驱动电路与所述第二绕组进行连接;所述第一驱动电路和/或所述第一绕组异常时,所述第二绕组加电后用于驱动所述转轴进行旋转。
16.优选地,所述轴承的滑动表面溅射二硫化钼固体润滑膜。
17.优选地,所述空间驱动机构,还包括:
18.旋变传感器,设置于所述支架的第一端,与所述驱动电机的所述转轴的第二端延伸部进行连接,用于获取所述转轴的瞬时位置数据;
19.线缆接插件,设置于所述支架的第二端侧壁上,通过线缆一端分别与所述第一驱动电路和所述第二驱动电路连接,另一端分别与所述第一绕组和所述第二绕组连接,以使所述第一驱动电路和所述第二驱动电路通过所述线缆接插件分别对应与所述第一绕组和所述第二绕组进行连接;且所述支架的第二端和第一端相对设置;
20.火工品,设置在所述支架上,用于控制所述负载平台的展开,以使所述负载平台上的所述负载正常工作;
21.光学棱镜,设置于所述支架的第二端,用于对所述驱动电机和所述旋变传感器的机械零位进行标定校准。
22.另外,本发明还提供一种驱动系统,包括:
23.如上述的空间驱动机构;
24.控制模块,用于根据外部指令生成驱动信号并发送;
25.驱动模块组,分别与所述控制模块和所述空间驱动机构进行连接,用于根据所述驱动信号驱使所述空间驱动机构中的驱动电机进行运转,以使与所述驱动电机的转轴连接的负载平台及所述负载平台上的负载转动至预设角度。
26.优选地,所述驱动模块组包括第一驱动模块和第二驱动模块;
27.所述第一驱动模块与所述空间驱动机构中的第一驱动电路连接,用于根据所述驱动信号通过所述第一驱动电路向所述驱动电机的第一绕组加电,以使所述驱动电机的转轴根据所述驱动信号进行旋转;
28.所述第二驱动模块与所述空间驱动机构中的第二驱动电路连接,用于根据所述驱动信号通过所述第二驱动电路向所述驱动电机的第二绕组加电,以使所述驱动电机的所述转轴根据所述驱动信号进行旋转。
29.优选地,所述第一驱动电路和所述第一绕组正常时,所述控制模块将所述驱动信号传送至所述第一驱动模块,以使所述第一绕组根据所述驱动信号驱使所述驱动电机的所述转轴进行旋转;
30.所述第一驱动电路和/或所述第一绕组异常时,所述控制模块将所述驱动信号传送至所述第二驱动模块,以使所述第二绕组根据所述驱动信号驱使所述驱动电机的所述转轴进行旋转。
31.优选地,所述驱动系统,还包括:
32.隔离模块,分别与所述控制模块和所述驱动模块组进行连接,以在所述驱动信号传输中对所述控制模块和所述驱动模块组进行隔离保护;
33.旋变解码模块,分别与所述隔离模块和所述空间驱动机构中的旋变传感器进行连接,以对所述旋变传感器传送的所述转轴的瞬时位置数据进行解码,并将解码后的所述瞬时位置数据经所述隔离模块传送至所述控制模块。
34.优选地,所述控制模块还用于根据解码后的所述瞬时位置数据与所述转轴的预设位置数据进行对比调整所述驱动电机的运转状态,以使所述驱动电机的所述转轴带动所述负载平台及所述负载转动至所述预设角度。
35.本发明与现有技术相比至少具有以下优点之一:
36.本发明提供的一种空间驱动机构,通过设置双驱动电路以及在驱动电机中设置双绕组,可以在不过多增加机械结构和重量的情况下显著地提高空间驱动机构的可靠性。
37.本发明中驱动电机还采用长寿命的固体润滑轴承以及轻量化悬臂式减振支撑结构,可以极大地增加驱动电机的使用寿命,进而极大地提高了空间驱动机构的使用寿命,将驱动电机寿命提高到五百万转之上。
38.本发明提供的一种空间驱动机构具有高精度、长寿命、结构紧凑及功能灵活的特点,可以广泛应用于带有空间指向任务的航天器中。
39.本发明提供的一种驱动系统,可以通过控制模块可以对外部命令进行解析并生成对应的驱动信号,从而使驱动电机可以完成外部指令要求的动作。
40.本发明提供的一种驱动系统中设有双驱动模块,可以分别与空间驱动机构中的双驱动电路进行对应连接,通过任一驱动模块均可以驱使空间驱动机构中的驱动电机完成外部命令要求的动作,极大地提高了驱动系统的可靠性。
41.本发明中控制模块还可以计算驱动电机的瞬时位置数据与预设位置数据之间的差值并以此对驱动电机的运转状态进行调整,从而使驱动电机可以精确地完成外部指令要求的动作。
附图说明
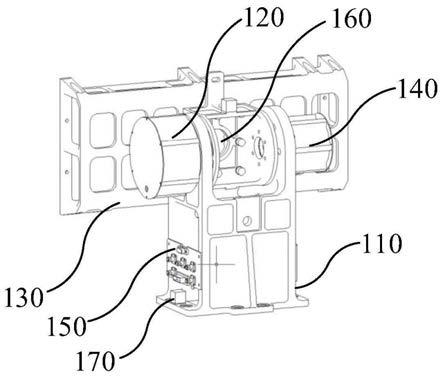
42.图1是本发明一实施例提供的一种空间驱动机构的结构示意图;
43.图2是本发明一实施例提供的一种驱动系统的结构示意图。
具体实施方式
44.以下结合附图和具体实施方式对本发明提出的一种空间驱动机构及驱动系统作进一步详细说明。根据下面说明,本发明的优点和特征将更清楚。需要说明的是,附图采用非常简化的形式且均使用非精准的比例,仅用以方便、明晰地辅助说明本发明实施方式的目的。为了使本发明的目的、特征和优点能够更加明显易懂,请参阅附图。须知,本说明书所附图式所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本发明实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本发明所能产生的功效及所能达成的目的下,均应仍落在本发明所揭示的技术内容能涵盖的范围内。
45.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
46.结合附图1所示,本实施例提供一种空间驱动机构,包括:支架110;至少两个驱动电路,均设置于航天器的控制系统中;驱动电机120,其包括至少两个绕组;所述驱动电机120设置于所述支架110上,分别与所述驱动电路和所述航天器的负载平台130进行连接;所
述驱动电机120加电后用于带动所述负载平台130及固定于所述负载平台130上的负载转动至预设角度。
47.请继续参考图1,所述驱动电机120还包括:壳体,设置于所述支架110的第一端;转轴,其第一端通过轴承固定于所述壳体上,第二端与所述负载平台130进行连接;所述转轴用于通过旋转带动所述负载平台130连接转动至所述预设角度。
48.可以理解的是,在一些其他的实施例中,所述轴承的滑动表面溅射二硫化钼固体润滑膜。
49.具体的,在本实施例中,所述空间驱动机构可以用于具有空间指向任务的所述航天器中,通过所述驱动电机120的所述转轴可以带动固定于所述负载平台130上的所述负载转动至预设角度,从而使所述负载可以执行并完成航天任务;优选地,所述驱动电机120可以采用细分驱动技术的步进电机,从而使所述空间驱动机构具有较高的精度和运转平稳度,同时振动、噪声和转距波动等问题也可以得到极大地改善,但本发明不以此为限。
50.在本实施例中,所述驱动电机120与所述负载平台130的连接可以采用悬臂支撑结构,以减少所述驱动电机120中所述转轴的受力,从而减少所述驱动电机120中所述轴承的受力,以提高所述轴承的使用寿命。
51.具体的,所述轴承可以采用固体润滑轴承,所述轴承的滑动表面可以溅射二硫化钼(mos2)固体润滑膜,并通过调整所述轴承内外隔圈的高度差可以实现所述轴承的定位预紧,从而保证固定于所述轴承上的所述转轴的轴向刚度以及所述轴承组件的旋转精度,同时减小所述轴承受力,从而提高所述轴承及所述驱动电机120的使用寿命。更具体的,在所述轴承内还可以设置高强度的碟形弹簧,以提高所述轴承抗冲击振动的能力,但本发明不以此为限。
52.在本实施例中,所述轴承的所有组件的材料均采用高强度不锈钢,并对所述轴承的所有组件进行多次热处理,以保证所述轴承中各组件或各零件热膨胀系数一致,从而有效地减小所述轴承各组件或各零件因在航空环境中受热变形不一致所带来的热应力,进而提高所述轴承及所述驱动电机120的使用寿命及可靠性。
53.请继续参考图1,至少两个所述绕组分别为第一绕组和第二绕组,且所述第一绕组和所述第二绕组分别设置于所述壳体内壁上;至少两个所述驱动电路分别为第一驱动电路和第二驱动电路;所述第一驱动电路与所述第一绕组进行连接;所述第一绕组加电后用于驱动所述转轴进行旋转;所述第二驱动电路与所述第二绕组进行连接;所述第一驱动电路和/或所述第一绕组异常时,所述第二绕组加电后用于驱动所述转轴进行旋转。
54.具体的,由于所述航天器对可靠性的要求,必须对所述航天器中的所有关键部件进行备份,以避免整个有效载荷的失效。对于所述空间驱动机构而言,如果将整个所述驱动电机120进行备份即所述空间驱动机构中设置两个所述驱动电机120,则会极大地增加所述空间驱动机构的体积和重量,无法满足所述航天器轻量化的要求,因此针对所述空间驱动机构的故障易发薄弱部位即驱动电路和电机绕组进行局部备份,既可以显著提高所述空间驱动机构的可靠性,又可以不过多的增加机械结构和重量来满足所述航天器轻量化的要求,但本发明不以此为限。
55.在本实施例中,所述空间驱动机构中包括两个驱动电路(即所述第一驱动电路和所述第二驱动电路)和两个电机绕组(即所述第一绕组和所述第二绕组);其中所述第一驱
动电路作为主份驱动电路,所述第一绕组作为主份绕组,则所述第二驱动电路为备份驱动电路,所述第二绕组为备份绕组。更具体的,当主份驱动线路正常工作时,即所述第一驱动电路和所述第一绕组均可以正常工作时,则通过所述第一驱动电路向所述第一绕组加电,以使所述驱动电机120的所述转轴可以响应所述航天器发出的各种控制信号,从而带动所述负载平台130转动至所述预设角度,此时备份驱动线路即所述第二驱动电路和所述第二绕组作为冷备份不参与工作;当所述主份驱动线路出现异常时,即所述第一驱动电路和所述第一绕组任一出现异常时,激活所述备份驱动线路即通过所述第二驱动电路向所述第二绕组加电,以使所述驱动电机120的所述转轴可以响应所述航天器发出的各种控制信号,带动所述负载平台130转动至所述预设角度,此时所述主份驱动线路即所述第一驱动电路和所述第一绕组处于关闭状态。
56.请继续参考图1,所述空间驱动机构还包括:旋变传感器140,设置于所述支架110的第一端,与所述驱动电机120的所述转轴的第二端延伸部进行连接,用于获取所述转轴的瞬时位置数据;线缆接插件150,设置于所述支架110的第二端侧壁上,通过线缆一端分别与所述第一驱动电路和所述第二驱动电路连接,另一端分别与所述第一绕组和所述第二绕组连接,以使所述第一驱动电路和所述第二驱动电路通过所述线缆接插件150分别对应与所述第一绕组和所述第二绕组进行连接;且所述支架110的第二端和第一端相对设置;火工品160,设置在所述支架110上,用于控制所述负载平台130的展开,以使所述负载平台130上的所述负载正常工作;光学棱镜170,设置于所述支架110的第二端,用于对所述驱动电机120和所述旋变传感器140的机械零位进行标定校准。
57.具体的,在本实施例中,所述旋变传感器140可以采用旋转变压器,且所述旋变传感器140包括定子和转子,所述定子固定于所述支架110的第一端,所述转子则固定于所述驱动电机120的所述转轴的第二端延伸部上;设置于所述航天器的所述控制系统中的所述第一驱动电路或所述第二驱动电路以及旋变激励电路通过线缆和所述线缆接插件150分别向所述第一绕组或第二绕组以及所述旋变传感器140加电后,所述驱动电机120的所述转轴进行旋转,所述旋变传感器140的所述转子则与所述驱动电机120的所述转轴同步旋转,所述旋变传感器140的所述定子与所述转子进行配合则可以获得所述转轴的所述瞬时位置数据,以便于后续对所述驱动电机120的运转状态进行调整,但本发明不以此为限。
58.具体的,在本实施例中,固定于所述支架110上的所述火工品160可以在所述航天器发射入轨时锁住所述负载平台130,并在所述航天器成功入轨后通过起爆使所述负载平台130展开,从而使所述负载平台130上的所述负载可以执行航天任务,但本发明不以此为限。
59.综上所述,本实施例提供的一种空间驱动机构,通过设置双驱动电路以及在驱动电机中设置双绕组,可以在不过多增加机械结构和重量的情况下显著地提高空间驱动机构的可靠性;驱动电机还采用了长寿命的固体润滑轴承以及轻量化悬臂式减振支撑结构,极大地增加了驱动电机的使用寿命,并将驱动电机寿命提高到五百万转之上,极大地提高了空间驱动机构的使用寿命。本实施例提供的一种空间驱动机构具有高精度、长寿命、结构紧凑及功能灵活的特点,能够可以广泛应用于带有空间指向任务的航天器中。
60.结合图2所示,本实施例还提供一种驱动系统,包括:如上述的空间驱动机构;控制模块210,用于根据外部指令生成驱动信号并发送;驱动模块组,分别与所述控制模块210和
所述空间驱动机构进行连接,用于根据所述驱动信号驱使所述空间驱动机构中的驱动电机120进行运转,以使与所述驱动电机120的转轴连接的负载平台130及所述负载平台130上的负载转动至预设角度。
61.请继续参考图2,所述驱动模块组包括第一驱动模块2201和第二驱动模块2202;所述第一驱动模块2201与所述空间驱动机构中的第一驱动电路连接,用于根据所述驱动信号通过所述第一驱动电路向所述驱动电机120的第一绕组加电,以使所述驱动电机120的转轴根据所述驱动信号进行旋转;所述第二驱动模块2202与所述空间驱动机构中的第二驱动电路连接,用于根据所述驱动信号通过所述第二驱动电路向所述驱动电机120的第二绕组加电,以使所述驱动电机120的所述转轴根据所述驱动信号进行旋转。
62.可以理解的是,在一些其他的实施例中,所述第一驱动电路和所述第一绕组正常时,所述控制模块210将所述驱动信号传送至所述第一驱动模块2201,以使所述第一绕组根据所述驱动信号驱使所述驱动电机120的所述转轴进行旋转;所述第一驱动电路和/或所述第一绕组异常时,所述控制模块210将所述驱动信号传送至所述第二驱动模块2202,以使所述第二绕组根据所述驱动信号驱使所述驱动电机120的所述转轴进行旋转。
63.具体的,在本实施例中,所述控制模块210作为所述驱动系统的信息处理中心,可以通过rs422接口接收外部指令或向外部发送消息;通过对外部指令进行解析及编程后,所述控制模块210可以生成两相相位差90度、细分的阶梯状“拟正弦波”驱动信号并发送至所述第一驱动模块2201或所述第二驱动模块2202,从而控制所述空间驱动机构中的所述驱动电机120完成外部指令要求的动作,即驱使所述驱动电机120带动所述负载平台130转动至预设角度,进而带动所述负载平台130上的负载转动至所述预设角度,以使所述负载可以执行并完成航天任务;优选地,所述控制模块210可以采用fpga芯片,但本发明不以此为限。
64.具体的,在本实施例中,所述第一驱动电路作为所述空间驱动机构中的主份驱动电路,所述第一绕组作为所述驱动电机的主份绕组,当所述第一驱动电路和所述第一绕组均可以正常工作时,则所述控制模块210可以将所述驱动信号发送至所述第一驱动模块2201,并由所述第一驱动模块2201通过所述第一驱动电路向所述驱动电机120的所述第一绕组加电,以使所述第一绕组根据所述驱动信号驱使所述驱动电机120的所述转轴进行旋转,从而使所述驱动电机120按外部指令要求进行运转,此时作为备份驱动电路的所述第二驱动电路和作为备份绕组的所述第二绕组不参与工作;当所述第一驱动电路和所述第一绕组任一出现异常时,则所述控制模块210可以将所述驱动信号发送至所述第二驱动模块2202,并由所述第二驱动模块2202通过所述第二驱动电路向所述驱动电机120的所述第二绕组加电,以使所述第二绕组根据所述驱动信号驱使所述驱动电机120的所述转轴进行旋转,从而使所述驱动电机120按外部指令要求进行运转,此时所述第一驱动电路和所述第一绕组不参与工作;优选地,所述第一驱动模块2201和所述第二驱动模块2202均可采用电机驱动芯片,但本发明不以此为限。
65.请继续参考图2,所述驱动系统还包括:隔离模块230,分别与所述控制模块210和所述驱动模块组进行连接,以在所述驱动信号传输中对所述控制模块210和所述驱动模块组进行隔离保护;旋变解码模块240,分别与所述隔离模块230和所述空间驱动机构中的旋变传感器140进行连接,以对所述旋变传感器140传送的所述转轴的瞬时位置数据进行解码,并将解码后的所述瞬时位置数据经所述隔离模块230传送至所述控制模块210。
66.可以理解的是,在一些其他的实施例中,所述控制模块210还用于根据解码后的所述瞬时位置数据与所述转轴的预设位置数据进行对比调整所述驱动电机120的运转状态,以使所述驱动电机120的所述转轴带动所述负载平台130及所述负载转动至所述预设角度。
67.具体的,在本实施例中,所述控制模块210发送的所述驱动信号可以先经过起隔离保护作用的所述隔离模块230后到达所述第一驱动模块2201或所述第二驱动模块2202,再驱使所述驱动电机120进行运转。优选地,所述隔离模块230可以采用电平隔离芯片,但本发明不以此为限。
68.具体的,在本实施例中,通过旋变激励电路向所述旋变传感器140加电后,所述旋变传感器140可以获取所述驱动电机120的所述转轴的所述瞬时位置数据并发送至所述旋变解码模块240进行解码,所述旋变解码模块240则将所述转轴解码后的所述瞬时位置数据经所述隔离模块230后传送至所述控制模块210;所述控制模块210则可以计算所述转轴解码后的所述瞬时位置数据与所述预设位置数据之间的差值,并根据差值及所述驱动信号对所述驱动电机120的运转状态进行调整,使得所述转轴的所述瞬时位置数据与所述预设位置数据保持一致,从而使所述驱动电机120可以精确地完成外部指令要求的动作,即所述驱动电机120带动所述负载平台130及所述负载平台130上的负载转动至所述预设角度,但本发明不以此为限。
69.此外,在本实施例中,所述驱动系统还包括电压及温度采集模块250和电流采集模块260,其电压及温度采集模块250和电流采集模块260均分别与所述第一驱动模块2201或所述第二驱动模块2202进行连接,以通过所述第一驱动模块2201或所述第二驱动模块2202获取所述驱动电机120的温度、电流及电压的模拟传感信号并传送至模拟开关270;所述模拟开关270则可以对所述驱动电机120的温度、电流及电压的模拟传感信号进行轮询切换并传送至数模转换模块280;所述数模转换模块280则可以将所述驱动电机120的温度、电流及电压的模拟传感信号转成数字信号后传送至所述控制模块210进行处理,从而获取所述驱动电机120运转时的温度、电流及电压数据,以便于详细了解所述驱动电机120的运转状态。
70.综上所述,本实施例提供的一种驱动系统,通过控制模块可以对外部命令进行解析并生成对应的驱动信号;驱动系统中设有双驱动模块,可以分别与空间驱动机构中的双驱动电路进行对应连接,通过任一驱动模块均可以根据驱动信号驱使空间驱动机构中的驱动电机完成外部命令要求的动作,极大地提高了驱动系统的可靠性;控制模块还可以计算驱动电机的瞬时位置数据与预设位置数据之间的差值,并结合驱动信号对驱动电机的运转状态进行调整,从而使驱动电机可以精确地完成外部指令要求的动作即带动负载平台及负载平台上的负载转动至预设角度。
71.尽管本发明的内容已经通过上述优选实施例作了详细介绍,但应当认识到上述的描述不应被认为是对本发明的限制。在本领域技术人员阅读了上述内容后,对于本发明的多种修改和替代都将是显而易见的。因此,本发明的保护范围应由所附的权利要求来限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1