一种测绘工程用无人机的制作方法
1.本技术涉及无人机的技术领域,尤其是涉及一种测绘工程用无人机。
背景技术:
2.随着科技飞速发展,无人机在测绘工程领域的应用愈来愈广泛,无人机航摄的功能在地形地貌测定、遥感勘测方面起到了越来越重要的作用。
3.目前,授权公告号为cn205524957u的专利文件公开了一种无人机系统,包括无人机、与无人机固定连接的成像装置、以及与无人机无线通讯的移动控制终端。移动控制终端发送变焦指令至无人机。无人机将所述变焦指令分配给成像装置。成像装置接收所述变焦指令,根据变焦指令执行相应的变焦动作。
4.针对上述中的相关技术,发明人认为这种无人机的成像装置的摄像头在进行拍摄时,视线会受到无人机起落架的阻挡,对拍摄造成影响,因此需要进行改进。
技术实现要素:
5.为了避免无人机在拍摄时支撑组件对摄像头的视线产生遮挡,本技术提供一种测绘工程用无人机。
6.本技术提供的一种测绘工程用无人机采用如下的技术方案:
7.一种测绘工程用无人机,包括无人机本体、摄像组件和支撑组件,摄像组件包括能够转动的摄像头,所述支撑组件包括固定在所述无人机本体上的支撑套筒,还包括滑动连接在支撑套筒内的支撑杆,支撑杆连接有能够带动支撑杆在支撑套筒内滑动的驱动组件,所述支撑组件在无人机本体上设置有不少于三组。
8.通过采用上述技术方案,无人机本体起飞后,使用人员通过驱动组件带动支撑杆向支撑套筒内滑动,能够使支撑杆缩入支撑套筒内,为摄像头让出拍摄的空间,从而避免了支撑杆对摄像头的摄像范围造成遮挡,而当无人机本体需要降落时,通过驱动组件带动支撑杆从支撑套筒内伸出即可使无人机本体在支撑杆的支撑下降落。
9.可选的,所述支撑杆的上端穿入所述支撑套筒内,所述驱动组件包括调节磁体和引导磁体,每个支撑杆穿入支撑套筒内的端部均固定有所述的调节磁体,引导磁体设置有多个,引导磁体连接有能够带动其移动的动力装置,多个引导磁体能够在动力装置的作用下进入或者离开所述支撑套筒的内部。
10.通过采用上述技术方案,使用动力装置将能够与调节磁体相互吸引的引导磁体送入支撑套筒内,则引导磁体能够为调节磁体提供吸力以带动支撑杆向支撑套筒内部滑动,而使用动力装置将能够与调节磁体相互排斥的引导磁体送入支撑套筒内,则引导磁体能够为调节磁体提供推力从而带动支撑杆从支撑套筒内滑出。
11.可选的,所述支撑套筒上开设有贯通至支撑套筒内的让位槽,所述驱动组件还包括能够转动的调节盘,调节盘上固定设置有边板,边板插入让位槽内,所述引导磁体固定在所述边板上,调节盘连接有能够带动调节盘转动的驱动件。
12.通过采用上述技术方案,驱动件带动调节盘转动能够带动边板转动,进而带动引导磁体经让位槽进出支撑套筒,实现改变与调节磁体相互作用的引导磁体的目的。
13.可选的,所述支撑套筒上可拆卸安装有支撑板,所述摄像头安装在所述支撑板下表面的下方,所述驱动件为固定在支撑板上的电动机,所述调节盘同轴固定在所述电动机的输出轴上。
14.通过采用上述技术方案,电动机启动能够带动自身输出轴转动,由于调节盘与电动机输出轴同轴固定,因此电动机启动即可带动调节盘转动。
15.可选的,所述支撑套筒上固定设置有连接螺栓,所述支撑板上开设有多个贯通的连接孔,每个连接螺栓各穿过一个连接孔,连接螺栓上螺纹连接有锁紧螺母,锁紧螺母抵在支撑板上。
16.通过采用上述技术方案,连接螺栓与锁紧螺母相互配合实现了对支撑板的可拆卸安装,方便了使用人员对摄像组件以及安装在支撑板上的驱动件进行拆卸维护。
17.可选的,所述支撑杆背离所述支撑套筒的端部安装有缓冲组件,缓冲组件包括活塞杆,活塞杆固定在支撑杆背离所述支撑套筒的端部,缓冲组件还包括缓冲套筒,缓冲套筒套设在活塞杆上,并与活塞杆滑动连接。
18.通过采用上述技术方案,无人机本体降落时,活塞杆能够在缓冲套筒内滑动,从而对缓冲套筒内部的空间进行压缩,缓冲套筒内的空气不能及时排出,有利于对无人机本体起到缓冲的作用。
19.可选的,所述缓冲套筒背离所述支撑杆的端部固定设置有橡胶垫。
20.通过采用上述技术方案,橡胶垫能够在无人机本体降落时,在支撑杆的端部与地面之间起到缓冲的作用,降低地面对缓冲套筒的冲击,提高缓冲套筒的使用寿命。
21.可选的,所述支撑杆上固定设置有凸缘,所述凸缘与橡胶垫之间连接有缓冲弹簧,缓冲弹簧套设在缓冲套筒上,缓冲弹簧的一端固定在凸缘上,另一端固定在橡胶垫上。
22.通过采用上述技术方案,缓冲弹簧能够吸收或者释放弹性势能,无人机本体降落时,凸缘与橡胶垫之间的距离被拉近,从而缓冲弹簧得到压缩,缓冲弹簧将无人机本体的一部分动能转化为弹性势能,减轻了地面对无人机本体的冲击。
23.综上所述,本技术包括以下至少一种有益技术效果:
24.1. 无人机本体起飞后,使用人员通过驱动组件带动支撑杆向支撑套筒内滑动,能够使支撑杆缩入支撑套筒内,为摄像头让出拍摄的空间,从而避免了支撑杆对摄像头的摄像范围造成遮挡,而当无人机本体需要降落时,通过驱动组件带动支撑杆从支撑套筒内伸出即可使无人机本体在支撑杆的支撑下降落;
25.2. 将与调节磁体相互吸引的引导磁体送入支撑套筒内,则引导磁体能够为调节磁体提供吸力以带动支撑杆向支撑套筒内部滑动,而将能够与调节磁体相互排斥的引导磁体送入支撑套筒内,则引导磁体能够为调节磁体提供推力从而带动支撑杆从支撑套筒内滑出。
附图说明
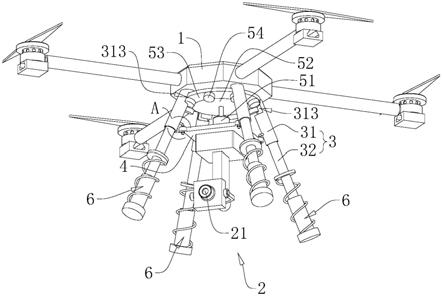
26.图1是本技术实施例的整体结构示意图。
27.图2是支撑组件的爆炸示意图。
28.图3是图1中a处的部分结构示意图。
29.附图标记说明:1、无人机本体;2、摄像组件;21、摄像头;3、支撑组件;31、支撑套筒;311、连接螺栓;312、锁紧螺母;313、让位槽;32、支撑杆;321、调节磁体;322、凸缘;4、支撑板;41、连接孔;51、电动机;52、调节盘;53、边板;54、引导磁体;6、缓冲组件;61、活塞杆;62、缓冲套筒;621、橡胶垫;63、缓冲弹簧。
具体实施方式
30.以下结合附图1
‑
3对本技术作进一步详细说明。
31.本技术实施例公开一种测绘工程用无人机。参照图1,测绘工程用无人机包括无人机本体1、摄像组件2和支撑组件3,其中,无人机本体1具有一个朝上的表面和朝下的表面,摄像组件2安装在无人机本体1下表面的下方,摄像组件2具有一个能够进行三百六十度转动的摄像头21,从而能够进行三百六十度的拍摄;支撑组件3设置有多个,用于将无人机本体1支撑在地面上。
32.参照图1和图2,在本实施例中,支撑组件3设置有四个,每个支撑组件3均包括固定在无人机本体1下表面上的支撑套筒31,支撑套筒31为长条形的圆筒,支撑套筒31相对于无人机本体1下表面倾斜设置,支撑套筒31的上端固定在无人机本体1上,支撑套筒31朝下的端部设有开口,此外,相邻的支撑套筒31上端之间的距离大于下端之间的距离,四个支撑套筒31形成从上到下向外扩张的棱锥形结构,有利于提高无人机本体1支撑在地面上时的稳定性。
33.参照图1和图2,支撑组件3还包括穿设在支撑套筒31内的支撑杆32,支撑杆32为长条形圆杆且支撑杆32的外壁与支撑套筒31的内壁相贴合,支撑杆32滑动连接在支撑套筒31内,支撑杆32的上端固定设置有具有磁性的调节磁体321,调节磁体321为圆柱形块状结构,调节磁体321背离支撑杆32的端部沿支撑套筒31的轴线方向朝上设置,每个调节磁体321朝上的端部的磁极的极性均相同。
34.参照图1和图3,支撑套筒31上可拆卸安装有支撑板4,支撑板4为矩形板,支撑板4平行于无人机本体1的下表面设置,支撑板4上开设有多个连接孔41,连接孔41的数量与支撑套筒31的数量相同,连接孔41贯穿支撑板4,每个支撑套筒31的外侧壁上均固定设置有连接螺栓311,每个连接螺栓311各穿过一个连接孔41伸到支撑板4的另一侧,连接螺栓311位于支撑板4另一侧的螺杆上螺纹连接有锁紧螺母312,锁紧螺母312抵在支撑板4的下表面上,从而锁紧螺母312与连接螺栓311相互配合,能够对支撑板4的位置进行锁定,摄像组件2的摄像头21安装在支撑板4的下表面的下方。
35.参照图1,为了使支撑杆32能够在支撑套筒31内伸缩,在支撑板4上固定设置有电动机51,电动机51的输出轴上同轴固定有调节盘52,调节盘52为圆盘形结构,调节盘52的边缘固定设置有边板53,边板53为环形板且固定在调节盘52的边缘,边板53相对于调节盘52倾斜朝上设置,边板53的表面与支撑套筒31的轴线相互垂直,此外,每个支撑套筒31上均开设有让位槽313,让位槽313贯穿支撑套筒31的侧壁,且让位槽313的开口朝向调节盘52的圆心,边板53从让位槽313的开口穿入支撑套筒31内。
36.参照图1和图2,边板53朝下的表面上固定设置有多个引导磁体54,引导磁体54为圆柱形块状结构,引导磁体54的轴线与调节磁体321的轴线相互平行,在本实施例中,引导
磁体54设置有八个,八个引导磁体54绕调节盘52圆心沿圆周路径等间隔均匀设分布,引导磁体54具有一个朝下的端部,且相邻引导磁体54朝下的端部的极性不相同,无人机本体1起飞后,启动电动机51带动调节盘52转动,使边板53上固定的引导磁体54通过让位槽313的开口转动到支撑套筒31内部,并使转动到支撑套筒31内的引导磁体54朝下的端部的极性与每个调节磁体321朝上的端部的极性相异,即可使引导磁体54对调节磁体321进行吸引,带动支撑杆32沿着支撑套筒31向上移动,从而使支撑杆32向支撑套筒31内收缩,避免了支撑杆32过长遮挡摄像组件2的摄像头21的视线,当无人机本体1需要降落时,启动电动机51带动调节盘52转动,使转动到支撑套筒31内的引导磁体54朝下的端部的极性与每个调节磁体321朝上的端部的极性相同,即可使引导磁体54对调节磁体321产生排斥的作用,带动支撑杆32沿着支撑套筒31向下移动,从而使支撑杆32的下端低于摄像头21,避免无人机本体1降落时对摄像头21造成损坏。
37.参照图1和图2,为了使无人机本体1在降落时能够更加平稳,在每个支撑杆32的下端均安装有缓冲组件6,缓冲组件6包括固定在支撑杆32下端的活塞杆61,活塞杆61为圆柱形结构并与支撑杆32同轴设置,活塞杆61的直径大于支撑杆32的直径,缓冲组件6还包括缓冲套筒62,缓冲套筒62为圆筒且缓冲套筒62的内径与活塞杆61的外径相同,缓冲套筒62套设在活塞杆61上,从而活塞杆61与缓冲套筒62滑动连接,无人机本体1降落时,缓冲套筒62着地后活塞杆61能够在缓冲套筒62内滑动对空腔进行压缩,空腔内的气体来不及排出从而能够起到缓冲作用,减小无人机本体1所受到的冲击。
38.参照图1和图2,缓冲套筒62的底部固定设置有橡胶垫621,橡胶垫621为圆柱形块状结构,无人机本体1降落时,橡胶垫621能够在地面与缓冲套筒62之间形成缓冲作用,减小缓冲套筒62的磨损,此外,支撑杆32上固定设置有凸缘322,凸缘322为环形的片状结构并固定在缓冲套筒62开口的上方,凸缘322与橡胶垫621之间连接有缓冲弹簧63,缓冲弹簧63套设在缓冲套筒62上,缓冲弹簧63的一端固定在凸缘322上,另一端固定在橡胶垫621上,无人机本体1降落时缓冲套筒62与活塞杆61之间发生相对滑动,能够对缓冲弹簧63进行压缩,从而使缓冲弹簧63将一部分无人机本体1的动能储存为弹性势能,使无人机本体1降落时更加平稳。
39.本技术实施例一种测绘工程用无人机的实施原理为:无人机本体1起飞后,启动电动机51带动调节盘52转动,使边板53上的引导磁体54通过让位槽313转动到支撑套筒31内部,并使引导磁体54朝下的端部的磁极与调节磁体321朝上的端部的磁极相反,能够使引导磁体54对调节磁体321产生吸引作用,使支撑杆32向支撑套筒31内部移动,避免支撑杆32位于支撑套筒31外的部分遮挡摄像头21的视线,而当无人机本体1需要降落时,使转入到支撑套筒31内的引导磁体54向下的磁极的磁性与调节磁体321朝上的端部的磁极的磁性相同,即可使支撑杆32重新从支撑套筒31内伸出。
40.本具体实施方式的实施例均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1