一种用于辐射事故下处置放射源的无人机的制作方法
1.本实用新型涉及无人机技术领域,特别涉及一种用于辐射事故下处置放射源的无人机。
背景技术:
2.目前,放射源被广泛应用在工业、医疗、食品、农业等领域,由于应用广泛,放射源因丢失、被盗等原因引起的辐射事故时有发生。放射源的尺寸很小,即使采用了相关的寻源技术找到放射源的大概位置后,放射源的最终准确位置也较难确认,抓取则更为困难。因此,在辐射事故下,采用相应的寻源方式确定放射源的大概位置后,还需处置人员对放射源的准确位置进一步确认。确认后按目前的常规处置方法,一般由处置人员使用长杆夹夹取放射源并完成放射源的收贮等工作。这些操作都需要处置人员近距离接触放射源,即使多名处置人员分批次、多次、轮流对放射源准确位置进行确定,并完成放射源抓取、收贮等操作,仍有可能会出现处置人员受到过大剂量照射,对人体产生不可修复损伤的情况。
3.随着无人机技术的发展,出现了一些无人机抓取目标物的方法和装置,但整体而言,抓取技术还不成熟,针对放射源的抓取技术更少。申请号为cn201710693374.x的中国发明专利申请文献公开了一种放射源的抓取装置,但该装置抓取放射源不够灵活和精细,不能实现操纵人员操纵动作与机械手抓取动作实时同步,且机械手安装方式单一,难以应对复杂环境下放射源的抓取。
技术实现要素:
4.针对以上不足,本实用新型旨在提供一种辐射事故下处置放射源的无人机,可实现放射源具体位置的远程准确确认,且搭载于无人机上的机械手动作精细灵活,能实现工作人员操纵动作与机械手抓取动作实时同步,并提供多种安装方式,以应对不同环境下对放射源的抓取。
5.为实现上述目的,本实用新型提供如下技术方案:
6.一种用于辐射事故下处置放射源的无人机,包括无人机机体,所述无人机机体设有摄像头、激光目标指示器、机械手和机械手信号接收天线,所述摄像头、激光目标指示器设于无人机机体的下方,并分别与无人机的电源电路连接,所述机械手设于无人机机体的下方,并与所述机械手信号接收天线通讯连接,所述机械手信号接收天线与地面工作站的远程遥控器通讯连接。
7.作为一种优选的技术方案,所述机械手为六自由度机械手,所述六自由度机械手直接安装于无人机机体的下方。
8.作为一种优选的技术方案,所述机械手为二自由度机械手,所述二自由度机械手通过四根软钢丝绳固定于无人机机体下方的四个角处或者所述二自由度机械手通过三根软钢丝绳固定于无人机机体下方的任意三个角处。
9.作为一种优选的技术方案,所述远程遥控器通过地面天线与所述机械手信号天线
通讯连接。
10.作为一种优选的技术方案,所述地面天线与所述机械手信号接收天线通讯的方式包括lora、wifi、gsm/gprs、5g/4g/3g/2g或以太网通讯;所述地面天线可伸缩。
11.作为一种优选的技术方案,所述远程遥控器包括同步示教器、手机app遥控器或手柄遥控器。
12.作为一种优选的技术方案,所述同步示教器安装于同步示教器支架上,同步示教器的结构与机械手的结构一致。
13.作为一种优选的技术方案,所述同步示教器支架呈方形框体形状,同步示教器安装在同步示教器支架的上层板上;同步示教器自然状态下下垂且不与同步示教器支架的底板接触;同步示教器支架的前后部镂空。
14.作为一种优选的技术方案,所述摄像头与所述机械手之间的安装距离不小于所述机械手的臂长。
15.作为一种优选的技术方案,所述摄像头为高清可见光摄像头和/或红外摄像头。
16.本实用新型的有益效果在于:
17.本实用新型通过搭载高清摄像头实现放射源具体位置的准确确定,摄像头的搭载位置和角度进行了优化,可全方位直播机械手抓取放射源的过程;激光目标指示器可辅助对准目标物,辅助无人机降落于合适位置,并降低放射源投掷收储至目标位置的难度;机械手远程遥控器操纵人员的操纵动作与机械手动作实时同步,操纵灵活、精细,适合小尺寸放射性物体的抓取,同时提供了两种机械手搭载方式,以适应不同环境下抓取放射源的需求;使用本实用新型可最大限度降低处置人员的受照剂量,保障辐射事故下的环境安全和人员健康安全。
附图说明
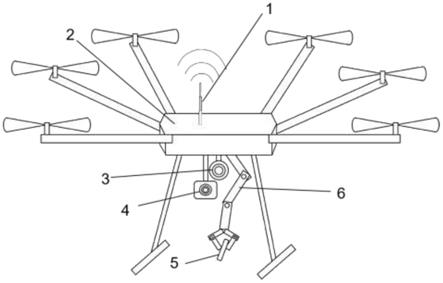
18.图1是本实用新型搭载六自由度机械手无人机的结构示意图;
19.图2是本实用新型搭载二自由度机械手无人机的结构示意图;
20.图3是本实用新型同步示教器的结构示意图。
21.附图说明如下:
[0022]1‑
机械手信号接收天线;2
‑
无人机机体;3
‑
激光目标指示器;4
‑
摄像头;5
‑
放射源;6
‑
六自由度机械手;7
‑
二自由度机械手;8
‑
软钢丝绳;9
‑
地面天线;10
‑
同步示教器支架;11
‑
同步示教器。
具体实施方式
[0023]
为能进一步了解本实用新型的内容、特点及功效,兹举例以下实施例,并配合附图详细说明如下。需要说明的是,以下实施例是描述性的,不是限定性的,不能由此限定本实用新型的保护范围。
[0024]
在本实用新型的描述中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一特征和第二特征直接接触,或第一特征和第二特征通过中间媒介间接接触。而且第一特征在第二特征“之上”、“上方”、“上面”可以是第一特征在第二特征的正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下
方”、“下面”可以是第一特征在第二特征的正下方或斜下方,或仅仅表示第一特征水平高度低于第二特征。
[0025]
文中所称一个元件与另一个元件“固定”时,它可以直接固定到另一个元件上或者也可以通过媒介元件固定。当一个元件被描述为与另一个元件“连接”时,它可以是直接连接到另一个元件或者通过媒介元件连接。本文所使用的术语“上”、“下”、“左”、“右”、“顶部”、“底部”、“左侧”、“右侧”以及类似的表述只是为了说明的目的,并不表示是唯一的实施方式。
[0026]
一种用于辐射事故下处置放射源的无人机,如图1、图2所示,包括无人机机体2,本实施例中,所述无人机可以是本领域常规使用的旋翼无人机,具有体积小、安装简单、稳定性高等特点。其本身包括机体、飞控系统、动力系统、数据链系统等常规组成部件和单元。
[0027]
在所述旋翼无人机的基础上,无人机机体2还进一步设有摄像头4、激光目标指示器3、机械手和机械手信号接收天线1,所述摄像头4、激光目标指示器3设于无人机机体2的下方,并分别与无人机的电源电路连接,所述机械手设于无人机机体2的下方,并与所述机械手信号接收天线1通讯连接,所述机械手信号接收天线1与地面工作站的远程遥控器通讯连接。
[0028]
为保证拍摄视像的清晰度,所述摄像头4优先采用高清可见光摄像头,在放射源与周围环境温差较大的情况下,可进一步使用红外摄像头辅助搜寻放射源。
[0029]
摄像头4可进行多倍变焦,摄像头4可进一步与地面工作站的电脑终端或者智能手机终端无线连接,将拍摄得到的视频图像通过无线方式实时回传至地面的电脑终端或者智能手机终端上。通过实时画面,可确定放射源的具体准确位置,检查放射源包壳的完整情况,调整无人机悬停和降落的位置,辅助抓取、投掷放射源等操作。
[0030]
通过搭载高清摄像头实现放射源具体位置的准确确定,摄像头4的搭载位置和角度进行了优化,在满足无人机重心基本不偏移的条件下,摄像头4与机械手之间的安装距离不小于机械手的臂长,摄像头4的安装高度由摄像头4的最短焦距、云台最大旋转角度及机械手和摄像头4之间的安装距离而定,以保证机械臂作业时不受摄像头阻碍,同时保证摄像头能一直以第三视角观察机械手抓取、投掷放射源等操作,全方位直播机械手抓取放射源的全过程。
[0031]
激光目标指示器3在作业过程中可发射可见光斑,光斑的指示位置基本在机械手与地面垂直的延长线上,用于辅助瞄准放射源和辅助将放射源回收至指定容器中。
[0032]
在本实施例中,指定容器可以是包括但不限于由铅、不锈钢、铜、石蜡等材料制成的屏蔽罐,但需要说明的是,以上屏蔽罐的选择方式只是一种简单的示例,并非旨在限制本技术所要求保护的范围。
[0033]
进一步地,指定容器如屏蔽罐可装载在无人车上,通过遥控无人车移动屏蔽罐,使屏蔽罐能够随时移动到放射源所处在的位置,在无人机的机械手抓取到放射源后,方便就地将放射源收储到屏蔽罐中存储。
[0034]
上述无人车可通过无人车遥控器进行无线远程遥控,并可进行路径规划等操作。
[0035]
可以理解的是,在收储放射源的过程中,激光目标指示器3发射可见光斑,当可见光斑落在屏蔽罐的开口处时,即提示操作人员此位置为放射源的正确掉落位置,在遥控操作松开机械手后,在重力的作用下,放射源便可顺利掉落入屏蔽罐内。当然,为了提高放射
源的掉落成功率,操控人员也可适当降低无人机的飞行高度,但激光目标指示器3所发射光斑对操控人员的指示作用依然有效。
[0036]
激光目标指示器3用于辅助对准目标物,辅助无人机降落于合适位置,并降低放射源投掷收储至目标位置的难度。
[0037]
在本实施例中,如图1所示,所述机械手为六自由度机械手6,所述六自由度机械手6直接安装在无人机机体2的下方,在放射源的周边环境适合无人机降落时,利用远程遥控器遥控六自由度机械手6直接抓取放射源5。六自由度机械手6可完成夹紧、旋转、左右摇摆、俯仰及基座的回转等动作,适合辐射泄漏事故现场允许无人机降落的情况下使用。
[0038]
在另一个实施例中,如图2所示,所述机械手还可以是二自由度机械手7,所述二自由度机械手7通过四根软钢丝绳8固定在无人机机体2下方的四个角处或者所述二自由度机械手7通过三根软钢丝绳8固定在无人机机体2下方的任意三个角处。在放射源的周边环境不适合无人机降落时,可将上述实施例的六自由度机械手6更换为本实施例的二自由度机械手7,再将无人机悬停于放射源5上方,根据电脑终端或者智能手机终端的实时画面使用遥控器远程遥控二自由度机械手7抓取放射源5。在无人机悬停时,二自由度机械手7的位置低于无人机的起落架,可完成夹紧、旋转等动作,在事故现场无人机降落困难或者降落受限的情况下,无人机可悬停于放射源5的上方,在激光目标指示器3和摄像头4的辅助下,完成对放射源5的抓取和投掷等操作。
[0039]
通过以上六自由度机械手与二自由度机械手的替换使用,在周边环境适合降落时使用六自由度机械手,六自由度机械手自由度高,操纵更为灵活,且其弯曲时满足机械手的最低点高于无人机的起落架,避免降落的时候机械手容易碰着地面而受损,但因此不适合悬停抓取放射源;二自由度机械手悬挂在无人机起落架上,由三根或四根软钢绳固定,安装方便且不易偏离中心位置,能够方便无人机采用悬停的方式抓取放射源。
[0040]
如图3所示,所述远程遥控器通过地面天线9与所述机械手信号接收天线1通讯连接。两个天线之间的通讯方式包括但不限于lora、wifi、gsm/gprs、5g/4g/3g/2g或以太网等通讯方式。但需要说明的是,以上通讯方式的选择形式只是一种简单的示例,并非旨在限制本技术所要求保护的范围。
[0041]
进一步地,所述地面天线9可伸缩,可根据作业场地的实际情况进行升高或降低,以增强两天线之间的通讯质量。
[0042]
具体而言,作为地面天线9可伸缩的一种实施方式,地面天线9的杆体可采用伸缩杆的形式。
[0043]
所述远程遥控器包括但不限于同步示教器、手机app遥控器或手柄遥控器。但需要说明的是,以上远程遥控器的选择方式只是一种简单的示例,并非旨在限制本技术所要求保护的范围。
[0044]
在本实施例中,所述远程遥控器特别选用同步示教器11。所述同步示教器11安装于同步示教器支架10上,需说明的是,同步示教器11的结构与搭载在无人机上的机械手的结构一致,即自由度和构造等相同,从而便于操控人员更好地操作机械手夹取放射源。
[0045]
同步示教器支架10用于支撑所述同步示教器11,通过同步示教器11可无线远程遥控操作无人机上的机械手。
[0046]
如图3所示,所述同步示教器支架10整体呈方形框体形状,同步示教器11安装在同
步示教器支架10的上层板上,从而易于安装和拆卸。
[0047]
安装好后,同步示教器11在自然状态下下垂且不与同步示教器支架10的底板接触,避免同步示教器11在活动中与底板接触而限制其操纵动作或可能引起的其它损害。
[0048]
进一步地,同步示教器支架10的前后部镂空,即如图3所示中的同步示教器支架10的前后部并无挡板遮挡,这样一来,更进一步方便工作人员操控。
[0049]
辐射事故情况下,在确定了放射源的大致位置后,使用本实用新型所提供的无人机对放射源进行处置,执行如下步骤:
[0050]
步骤s101:无人机根据飞控指令飞至目标区域,调整高度悬停,使用高清摄像头辅助搜寻放射源,在现场环境物体温差较大的情况下,可使用红外摄像头辅助搜寻,摄像视频图像通过无线实时回传至智能手机终端或电脑终端;
[0051]
步骤s102:搜寻到放射源后,可大致通过视频图像检查一下放射源的外观,并观察放射源的周边环境是否适合无人机降落;
[0052]
步骤s103:若适合无人机降落,则观察摄像头实时回传的视频画面,激光目标指示器发射的光斑在放射源旁边,则说明无人机悬停在放射源正上方,调整无人机姿态,缓慢降落;
[0053]
步骤s104:根据实时回传的画面,使用同步示校器远程遥控机械手抓取放射源,通过机械手旋转和摄像头放大等动作和操作进一步检查放射源包壳是否有破损等情况;
[0054]
步骤s105:若放射源周边环境不适合无人机降落,则可采用如图2所示的搭载二自由度机械手的处置无人机悬停于放射源上方,根据实时画面使用同步示校器远程遥控机械手抓取放射源;
[0055]
步骤s106:抓取了放射源的处置无人机飞至放射源收储装置(如屏蔽罐等容器)上方悬停,根据实时回传的视频画面调整无人机的飞行姿态和高度,观察到激光目标指示器发射的光斑落在放射源收储目标位置时(如刚好落在屏蔽罐的开口处时),使用同步示校器远程遥控机械手投掷放射源,完成放射源的收储操作。
[0056]
本实用新型通过搭载高清摄像头实现放射源具体位置的准确确定,摄像头的搭载位置和角度进行了优化,可全方位直播机械手抓取放射源的过程;激光目标指示器可辅助对准目标物,辅助无人机降落于合适位置,并降低放射源投掷收储至目标位置的难度;机械手远程遥控器操纵人员的操纵动作与机械手动作实时同步,操纵灵活、精细,适合小尺寸放射性物体的抓取,同时提供了两种机械手搭载方式,以适应不同环境下抓取放射源的需求;使用本实用新型可最大限度降低处置人员的受照剂量,保障辐射事故下的环境安全和人员健康安全。
[0057]
以上所述,仅为本实用新型的较佳的具体实施例,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其构思加以等同替换或改变,都应涵盖在本实用新型的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1