无人机降落平台、无人机降落控制方法及无人机系统与流程
本技术涉及工业自动化,尤其涉及无人机降落平台、无人机降落控制方法及无人机系统。
背景技术:
1、目前,多旋翼无人机降落过程中存在的气流接触到降落平台后形成紊流,反作用于无人机,形成的地面效应会影响无人机的正常降落。其中,地面效应是指无人机螺旋桨产生的向下高速气流经过与接触之后产生的回流、紊流会使得无人机的姿态发生改变。
技术实现思路
1、有鉴于此,本技术提供了无人机降落平台、无人机降落控制方法及无人机系统,能够有效抑制地面效应对无人机的扰动,提高无人机起飞或降落时的稳定性。
2、第一方面,本技术提供一种无人机降落平台,所述无人机降落平台包括:
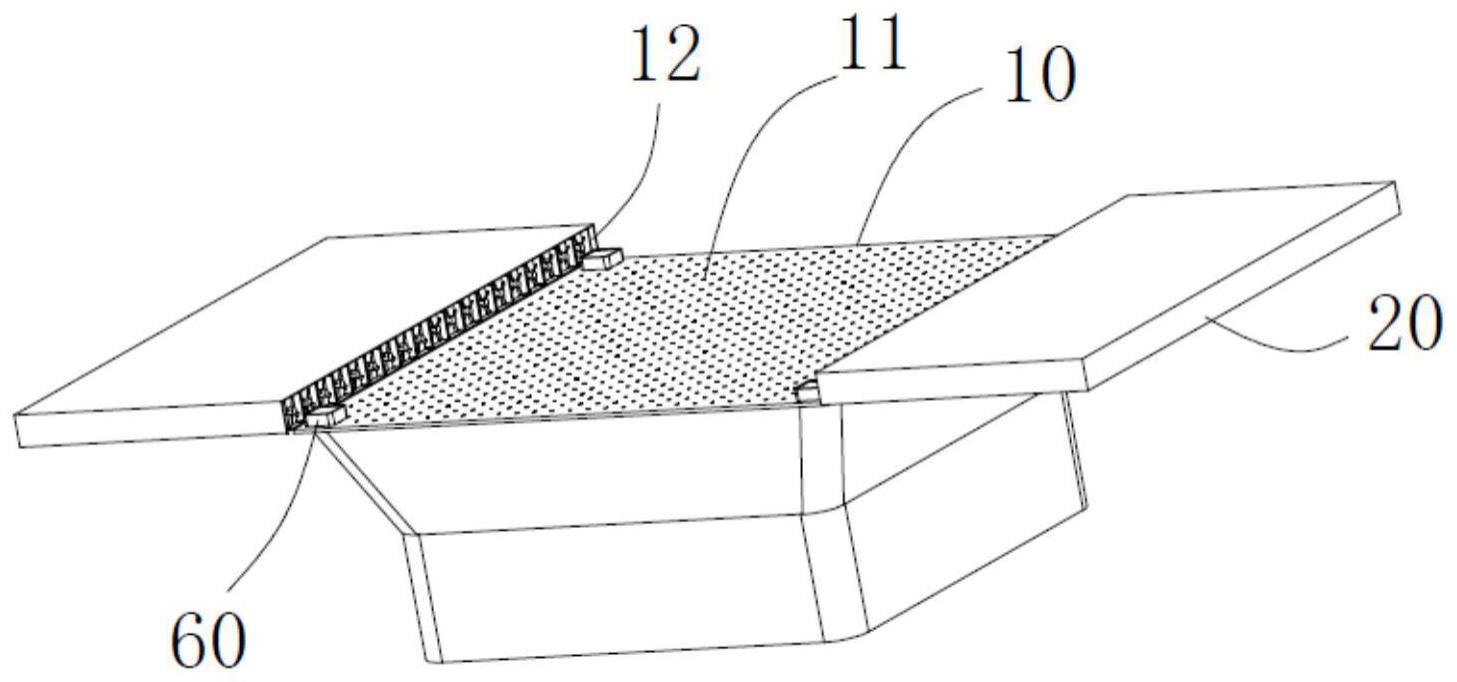
3、停机平台,所述停机平台设有至少一个导风孔;及
4、第一导流驱动件,所述第一导流驱动件设置于所述停机平台的下方,所述第一导流驱动件用于从所述导风孔将迎风面的气流引导至所述停机平台的背风面。
5、在上述方案中,通过在停机平台的下方设置第一导流驱动件,使得无人机螺旋桨产生的向下高速气流能够在第一导流驱动件的作用下,将停机平台迎风面的至少部分气流从导风孔引导至停机平台的背风面,从而能够大幅改善地面效应对无人机飞行状态的干扰,提高无人机起飞或降落时的稳定性。
6、结合第一方面,在一种可行的实施方式中,所述无人机降落平台还包括:
7、至少两个第二导流驱动件,所述至少两个第二导流驱动件分别设置于所述停机平台两侧。
8、在上述方案中,设置于停机平台两侧的第二导流驱动件能够将无人机螺旋桨产生的向下高速气流向停机平台的两侧流出,进一步加速干扰气流的排出,进一步改善地面效应对无人机飞行状态的干扰,提高无人机起飞或降落时的稳定性。
9、结合第一方面,在一种可行的实施方式中,所述第二导流驱动件为第二导流风扇,多个第二导流风扇沿所述停机平台相对设置的两个第一侧边依次排列安装于所述停机平台两侧。
10、在上述方案中,可以增加气流的排出量,地面效应对无人机飞行状态的干扰。
11、结合第一方面,在一种可行的实施方式中,所述无人机降落平台还包括:
12、导风件,所述导风件的进风口与所述降落平台密封连接,所述导风件的出风口与所述第一导流驱动件密封连接。
13、在上述方案中,通过导风件将降落平台与第一导流驱动件密封连接,有利于提高第一导流驱动件的安装灵活度。
14、结合第一方面,在一种可行的实施方式中,所述导风件的进风口的截面面积大于所述出风口的截面面积。
15、在上述方案中,导风件的进风口的截面面积大于出风口的截面面积,有利于增大第一导流驱动件的进风量,有利于将降落平台上的干扰气流快速从停机平台的迎风面引导至背风面。
16、结合第一方面,在一种可行的实施方式中,所述无人机降落平台还包括:
17、至少两个顶盖,所述顶盖与所述停机平台迎风面的两侧边缘之间分别形成空腔;
18、所述至少两个第二导流驱动件沿所述停机平台的两侧边缘分别安装于停机平台上且位于对应一个所述空腔内。
19、在上述方案中,第二导流驱动件设置于顶盖与停机平台之间,能够提高整体结构的紧凑性,又不会影响侧向气流的排出。
20、结合第一方面,在一种可行的实施方式中,所述至少两个顶盖可开合设置于所述停机平台上。
21、在上述方案中,顶盖可开合设置于停机平台上,能够通过顶盖保护停机平台及其停机平台上的所安装的电子元件,提高停机平台的使用寿命。
22、结合第一方面,在一种可行的实施方式中,所述停机平台设有多个所述导风孔,多个所述导风孔阵列排布,所述导风孔的孔径为3mm~8mm。
23、在上述方案中,可以加速干扰气流的排出,并且通过控制孔径,既可以保障气流的有效排除,又不会影响无人机降落至停机平台上的稳定性。
24、结合第一方面,在一种可行的实施方式中,所述无人机降落平台还包括:
25、控制器,所述控制器根据风速数据以及无人机的高度数据调节导流驱动件的转速。
26、在上述方案中,控制器根据风速数据以及无人机的高度数据调节第一导流驱动件、第二导流驱动件的转速,在风速较大时,加快导流驱动件的转速,使得无人机吹向停机平台的风能够经导风孔从停机平台的迎风面引导至背风面;在风速较小时,降低导流驱动件的转速,有利于节约成本,提高导流驱动件的使用寿命。
27、结合第一方面,在一种可行的实施方式中,所述无人机降落平台还包括:
28、风速传感器,所述风速传感器用于采集风速数据。
29、在上述方案中,通过风速传感器采集风速数据,可以提高导流驱动件的转速调节精度,保障干扰气流的及时排出。
30、结合第一方面,在一种可行的实施方式中,所述无人机降落平台还包括:
31、至少两个顶盖,所述至少两个顶盖可开合设置于所述停机平台上;
32、所述控制器控制设置于所述停机平台上的至少两个顶盖相背移动,以打开所述停机平台。
33、在上述方案中,通过控制停机平台上的至少两个顶盖相背移动,以打开所述停机平台,无人机能够实现降落或起飞。在使用完毕后,两个顶盖能够相向移动,关闭停机平台,此时,顶盖能够保护停机平台及其停机平台上的所安装的电子元件,提高停机平台的使用寿命。
34、第二方面,本技术提供一种无人机降落控制方法,所述控制方法应用于无人机降落平台中,所述无人机降落平台包括设有至少一个导风孔的停机平台及第一导流驱动件,所述第一导流驱动件设置于所述停机平台的下方;所述控制方法包括:
35、获取停机平台的风速数据和无人机的高度数据;
36、根据所述风速数据以及所述无人机的高度数据调节所述第一导流驱动件的转速。
37、在上述方案中,通过获取无人机的风速数据以及无人机的高度数据调节导流驱动件的转速,使得无人机吹向停机平台的风能够经导风孔从停机平台的迎风面引导至背风面,有利于大幅改善地面效应对无人机飞行状态的干扰,提高无人机起飞或降落时的稳定性。
38、结合第一方面,在一种可行的实施方式中,所述获取无人机的高度数据,包括:
39、从无人机直接获取无人机的高度数据;或
40、通过与无人机通信连接的云端服务器获取无人机的高度数据。
41、结合第一方面,在一种可行的实施方式中,所述无人机降落平台还包括分别设置于所述停机平台两侧的至少两个第二导流驱动件;所述控制方法还包括:
42、根据所述风速数据以及所述无人机的高度数据调节所述第二导流驱动件的转速。
43、在上述方案中,设置于停机平台两侧的第二导流驱动件能够将无人机螺旋桨产生的向下高速气流向停机平台的两侧流出,进一步加速干扰气流的排出,并且通过控制第二导流驱动件的转速,实现第二导流驱动件的自适应调节,有利于大幅改善地面效应对无人机飞行状态的干扰,提高无人机起飞或降落时的稳定性。
44、结合第一方面,在一种可行的实施方式中,所述无人机降落平台还包括至少两个顶盖,所述至少两个顶盖可开合设置于所述停机平台上,且所述顶盖与所述停机平台之间分别形成空腔,所述至少两个第二导流驱动件分别设置于对应一个所述空腔内。
45、在上述方案中,第二导流驱动件设置于顶盖与停机平台之间,能够提高整体结构的紧凑性,又不会影响侧向气流的排出。
46、结合第一方面,在一种可行的实施方式中,在所述获取停机平台的风速数据之前,所述方法还包括:
47、基于启用指令,控制设置于所述停机平台上的至少两个顶盖相背移动,以打开所述停机平台。
48、在上述方案中,通过控制停机平台上的至少两个顶盖相背移动,以打开所述停机平台,无人机能够实现降落或起飞。在使用完毕后,两个顶盖能够相向移动,关闭停机平台,此时,顶盖能够保护停机平台及其停机平台上的所安装的电子元件,提高停机平台的使用寿命。
49、第三方面,本技术提供一种无人机系统,包括无人机和无人机降落平台,所述无人机降落平台为上述第一方面所述的无人机降落平台。
50、本技术提供的无人机降落平台,在停机平台底部设置第一导流驱动件,从而使得无人机螺旋桨产生的向下高速气流能够在第一导流驱动件的作用下,将停机平台迎风面的至少部分气流从导风孔引导至停机平台的背风面,从而能够大幅改善地面效应对无人机飞行状态的干扰,提高无人机起飞或降落时的稳定性。
51、本技术提供的无人机降落控制方法,通过获取无人机的风速数据以及无人机的高度数据调节第一导流驱动件的转速,将停机平台迎风面的至少部分气流从导风孔快速引导至停机平台的背风面,有利于大幅改善地面效应对无人机飞行状态的干扰,提高无人机起飞或降落时的稳定性。
52、本技术实施例的其他特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本技术实施例而了解。本技术实施例的目的和其他优点在说明书以及附图所特别指出的结构来实现和获得。
- 还没有人留言评论。精彩留言会获得点赞!