一种适用卫星S轴的结构与控制双备份反作用飞轮系统及控制方法
一种适用卫星s轴的结构与控制双备份反作用飞轮系统及控制方法
技术领域
1.本发明涉及一种适用卫星s轴的结构与控制双备份反作用飞轮系统及控制方法,属于空间执行机构技术领域。
背景技术:
2.卫星及相关技术正应用于通信、导航、遥感、空间科学实验等领域,但是太空中因为太空射线辐射等原因会对卫星部件造成永久性损伤,导致卫星的使用寿命较短,提升可靠性的同时降低成本,是卫星技术获得更广泛应用的前提。反作用飞轮(以下简称“飞轮”)是卫星上不可或缺的姿态控制机构,其可靠性决定了卫星的姿态的可控性。现有飞轮几乎均采用单电路控制系统与单轮体结构,在三个正交轴进行飞轮排布,这种模式可靠性欠佳,因为一旦太空辐照等外部因素对飞轮控制的电学器件造成损伤或因轴承失效导致结构失效则整套飞轮控制系统会陷入停摆状态,进而失去了对卫星姿态的调控能力,例如对光学成像卫星而言,失去卫星的姿态控制能力则意味着对卫星的光学相机载荷指向方向失去控制,导致无法获取目标成像。
3.为了提高反作用飞轮姿态调控系统的可靠性,使卫星在轨服役时间更长,通常采取的措施是选用更高的抗辐照度器件,这样虽可以达到一定程度上使用寿命的延长,但是宇航级器件的成本呈指数级增加。
4.国内外许多研究者开展了反作用飞轮系统的可靠性设计研究。房晓伟,陈茂胜,孔令波,孙金傲.基于fpga的高可靠反作用飞轮控制算法研究[j].测试技术学报,2020,第34卷(1):83-88,92提出了基于现场可编程门阵列(fpga)研究了高可靠反作用飞轮控制方法。殷明.飞轮电机电磁设计及其性能分析研究[d].东南大学,2019对飞轮电机的结构进行分析和改进。现有的提高反作用飞轮系统可靠性的方法,大多通过单一的优化控制算法与选用更高的抗辐照度器件实现或单一地优化飞轮电机的结构实现更高的可靠性,优化算法时一般需要fpga等昂贵的电子元件,造价极高,同时进行选用的电子器件均为不可更换的,一旦损坏整个反作用飞轮工作系统会陷入瘫痪;单一对电机结构进行优化时又不能保证电子控制系统的可靠性。
[0005]
有鉴于此,设计一种适用卫星s轴的结构与控制双备份反作用飞轮系统是十分有必要的。
技术实现要素:
[0006]
针对现有技术的不足,本发明提供一种适用卫星s轴的结构与控制双备份反作用飞轮系统及控制方法,适用卫星s轴的飞轮结合卫星上自带的磁力矩器在降低飞轮数量的同时采用了飞轮轮体结构的热备份,控制系统冷备份的形式,热冷双备份的设计思路极大地提高了飞轮的可靠性,延长了飞轮的使用寿命,飞轮个数的减少与控制系统电路的优化降低了卫星成本,进一步提升了微小卫星低成本的优势。
[0007]
术语解释:
[0008]
1、stm32核心处理器:stm32核心处理器为专为要求高性能、低成本、低功耗的嵌入式应用设计的arm
ꢀ‑
m0,m0+,m3,m4和m7内核的32位微控制器。
[0009]
2、mosfet阵列:mosfet阵列是由很多mosfet晶体管集成的由栅极电压控制的电学隔离阵列,若阵列为nmos阵列,则栅极处电压为高电压时晶体管导通,栅极为低电压时晶体管关断。
[0010]
3、mos管:即金属—氧化物—半导体场效应晶体管,是mosfet晶体管的简称,为一种可以广泛使用在模拟电路与数字电路的场效晶体管,为具有源极,漏极和栅极的三端器件,在栅极上施加合适的电压后,源极与漏极之间会导通,此时mos管的源极与漏极相当于导线的两端。
[0011]
4、adc:模拟数字转换器的简称,通常是指一个将模拟信号转变为数字信号的电子元件。
[0012]
5、gpio:即通用输入/输出端口,可以通过它们输出高低电平或者通过它们读入引脚的状态(高电平/低电平)。
[0013]
6、pwm:即脉宽调制技术,是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术,广泛应用在从测量、通信到功率控制与变换的许多领域中。
[0014]
7、uart:即通用异步收发传输器,是一种通用串行数据传输总线,用于异步通信。该总线双向通信,可以实现全双工传输和接收。
[0015]
8、pcb:即印制电路板,又称印刷线路板,是重要的电子部件,是电子元器件的支撑体,是电子元器件电气相互连接的载体。
[0016]
9、s轴:在直角坐标系下该轴正向与直角坐标系x轴、y轴、z轴正向均成54.7
°
夹角。
[0017]
10、can:can(controller area network)是国际上应用最广泛的现场总线之一
[0018]
11、地心惯性参考系:在空间保持静止或匀速直线运动(无加速度)的坐标系称为惯性坐标系;满足如下条件则被称为地心惯性参考系:1)地球质心为坐标系原点,2)z轴沿着地球自转轴指向协议地极,3)x轴位于赤道平面内,并指向春分点,4)y轴符合右手笛卡儿坐标系。
[0019]
12、电机极对:转子内衬的磁铁各有自己的北极和南极,其中只有一个端面向定子并与定子相互作用。有相同数量的南北磁体面向转子,每组n和s磁体称为“极对”,例如电机具有1个北极磁体和1个南极磁体称为1个极对的电机。
[0020]
本发明的技术方案如下:
[0021]
一种适用卫星s轴的结构与控制双备份反作用飞轮系统,包括六个数字霍尔传感器、两个飞轮轮体、两个直流无刷电机和一个具有冷备份功能的控制系统板;
[0022]
其中,两个飞轮轮体分别位于卫星的s轴的上下两端,平行排列,并均与具有冷备份功能的控制系统板相连;每三个数字霍尔传感器彼此互为空间120
°
对称地安装在一个飞轮轮体的定子上,飞轮轮体固定在直流无刷电机的转子上,直流无刷电机与具有冷备份功能的控制系统板均固定在飞轮系统外壳上。
[0023]
根据本发明优选的,所述具有冷备份功能的控制系统板包括三个核心处理器stm32、四组集成驱动、四个电流传感器和两个mosfet开关阵列,三个核心处理器stm32包括stm32-x、stm32-y、stm32-z,四组集成驱动包括第一集成驱动、第二集成驱动、第三集成驱
动、第四集成驱动,四个电流传感器包括第一电流传感器、第二电流传感器、第三电流传感器、第四电流传感器,两个mosfet开关阵列包括mosfet开关阵列a和mosfet开关阵列b,均集成在一张pcb电路板上,pcb电路板接口与直流无刷电机、数字霍尔传感器之间使用导线连接。
[0024]
stm32-x与stm32-y型号相同,stm32-x与stm32-y中每个核心处理器至少集成有两组独立adc、一个uart、十八个gpio信号接口和产生十二路pwm波的功能模块;
[0025]
两组独立adc包括adcx、adcy,adcx与第一电流传感器的信号输出接口相连,adcy与第二电流传感器的信号输出接口相连,在十八个gpio信号接口中,六路gpio信号接口与第一集成驱动的控制信号输入接口相连,六路gpio信号接口与第二集成驱动的控制信号输入接口相连,三路gpio信号接口与mosfet开关阵列a的霍尔隔离阵列x相连,分别通过霍尔隔离阵列x接收被安装在电机x下方的三个数字霍尔传感器的电压信息,另外三路gpio信号接口与mosfet开关阵列a的霍尔隔离阵列y相连,分别通过霍尔隔离阵列y接收被安装在电机y下方的三个数字霍尔传感器的电压信息;两个直流无刷电机包括电机x和电机y;
[0026]
stm32-z至少集成有一个can模块、两个uart、四个gpio信号接口,can模块与飞轮星上接口相连,用于与姿态控制下位机通信,两个uart包括第一uart和第二uart,第一uart与stm32-x的uart相连,用于stm32-x与stm32-z的通信,第二uart与stm32-y的uart相连,用于stm32-y与stm32-z的通信,四个gpio信号接口中,两路gpio信号接口分别连接mosfet开关阵列a的控制栅极x与控制栅极y,对mosfet开关阵列a实现控制与供电,另外两路gpio信号接口分别连接mosfet开关阵列b的控制栅极x与控制栅极y,对mosfet开关阵列b实现控制与供电;
[0027]
根据本发明优选的,每组独立的adc,用于采集电流模拟信号,进而解算出采样电流数字信号;每组集成驱动,用于响应核心处理器stm32输出的pwm控制电压,从而实现对飞轮的转速和力矩电流的实时控制;每个电流传感器,用于串联在其所对应的集成驱动和飞轮轮体间的主回路中,从而获得采样电流模拟信号,采样电流模拟信号经运放放大后输出给对应的一组adc。
[0028]
根据本发明优选的,主控制系统包括stm32-x、第一集成驱动、第二集成驱动、第一电流传感器、第二电流传感器;其中,第一集成驱动与第一电流传感器为电机x及飞轮轮体x的电路控制部分,第二集成驱动与第二电流传感器为电机y及飞轮轮体y的电路控制部分;两个飞轮轮体包括飞轮轮体x和飞轮轮体y;
[0029]
冷备份控制系统包括stm32-y、第三集成驱动、第四集成驱动、第三电流传感器、第四电流传感器;
[0030]
两个mosfet开关阵列用于执行主控制系统与冷备份控制系统之间的隔离任务;
[0031]
mosfet开关阵列a包括驱动隔离阵列x、霍尔隔离阵列x、驱动隔离阵列y、霍尔隔离阵列y、控制栅极x、控制栅极y;
[0032]
其中,驱动隔离阵列x与霍尔隔离阵列x分别包括三个mosfet晶体管,这六个mosfet晶体管的栅极互连形成控制栅极x,驱动隔离阵列x的三个mosfet晶体管的源极分别与第一集成驱动的u、v、w三个驱动输出接口相连,驱动隔离阵列x的三个mosfet晶体管的漏极分别与电机x的u、v、w三个驱动输入接口相连,霍尔隔离阵列x的三个mosfet晶体管的源极分别与stm32-x的三路gpio信号接口相连,霍尔隔离阵列x的三个mosfet晶体管的漏极分
别与电机x下方安装的三个数字霍尔传感器的三个信号输出接口相连,在控制栅极x处施加的电压高低控制驱动隔离阵列x与霍尔隔离阵列x中mosfet晶体管的源极与漏极之间的导通与关断,实现对飞轮轮体x的主控制系统的导通与关断;
[0033]
驱动隔离阵列y与霍尔隔离阵列y分别包括三个mosfet晶体管,这六个mosfet晶体管的栅极互连形成控制栅极y,驱动隔离阵列y的三个mosfet晶体管的源极分别与第二集成驱动的u、v、w三个驱动输出接口相连,驱动隔离阵列y的三个mosfet晶体管的漏极分别与电机y的u、v、w三个驱动输入接口相连,霍尔隔离阵列y的三个mosfet晶体管的源极分别与stm32-x的三路gpio信号接口相连,三个mosfet晶体管的漏极分别与电机y下方安装的三个数字霍尔传感器的三个信号输出接口相连,在控制栅极y处施加的电压高低控制驱动隔离阵列y与霍尔隔离阵列y中mosfet晶体管的源极与漏极之间的导通与关断,实现对飞轮轮体y的主控制系统的导通与关断。
[0034]
根据本发明优选的,stm32-x接收stm32-z下达的指令信息,与当前转速信息对比后,转化为具体的pwm电压控制信号,同时,stm32-x通过自检信息判断主控制系统功能与飞轮轮体是否正常,若不正常,则通过uart通信上报stm32-z,通过stm32-z控制mosfet开关阵列a和mosfet开关阵列b,将出现问题的电机与飞轮轮体的控制驱动系统切换为stm32-y对应的冷备份控制系统;
[0035]
stm32-z用于接受星载中心计算机下发到姿态控制下位机,发送至飞轮驱动系统的指令信息,并上报转速、加速度,是否启用备份系统等信息,同时接收stm32-x与stm32-y上报的转速、加速度与stm32-x的系统自检信息,从而决定是否控制mosfet开关阵列a和mosfet开关阵列b,将控制驱动系统切换为stm32-y对应的冷备份控制系统。
[0036]
进一步优选的,stm32-x对应的主控制系统正常工作时,stm32-z对mosfet开关阵列a的控制栅极x和控制栅极y施加适当电压,驱动隔离阵列x、驱动隔离阵列y、霍尔隔离阵列x和霍尔隔离阵列y的源极和漏极之间导通,stm32-z对mosfet开关阵列b的控制栅极x和控制栅极y施加低电压,驱动隔离阵列x、驱动隔离阵列y、霍尔隔离阵列x和霍尔隔离阵列y的源极和漏极之间关断;
[0037]
stm32-x对应的主控制系统对电机x进行控制的部分出现故障时,stm32-z对mosfet开关阵列a的控制栅极x施加适当电压,驱动隔离阵列x与霍尔隔离阵列x的源极和漏极之间关断,stm32-z对mosfet开关阵列b的控制栅极x施加适当电压,驱动隔离阵列x与霍尔隔离阵列x的源极和漏极之间导通,电机x的主控制系统实现关闭,电机x对应的冷备份控制系统开始工作;
[0038]
stm32-x对应的主控制系统对电机y进行控制的部分出现故障时,stm32-z对mosfet开关阵列a的控制栅极y施加适当电压,驱动隔离阵列y与霍尔隔离阵列y的源极和漏极之间关断,stm32-z对mosfet开关阵列b的控制栅极y施加适当电压,驱动隔离阵列y与霍尔隔离阵列y的源极和漏极之间导通,电机y的主控制系统实现关闭,电机y对应的冷备份控制系统开始工作。
[0039]
根据本发明优选的,stm32-x与stm32-y的型号均为stm32l4r5zit6,stm32-z的型号为stm32l4q5rgt6;电流传感器的型号为cc6920so-5a;mosfet开关阵列a和mosfet开关阵列b中的mosfet晶体管均选用n型mos管,型号为fds6930b;集成驱动的型号为drv8302dca。
[0040]
上述适用卫星s轴的结构与控制双备份反作用飞轮系统的控制方法,步骤如下:
[0041]
步骤1:stm32-z接收到姿态控制下位机分解的来自于星载中心计算机下发的指令信号后,将指令信息解析并将转速控制信息下发到stm32-x;
[0042]
步骤2:stm32-x接收到控制指令后,进行直流无刷电机的控制,两个飞轮轮体同时执行工作指令,实现热备份,其上连接的数字霍尔传感器接收到电平信息,得以确定直流无刷电机转子位置,对直流无刷电机转子位置进行解算后,向集成驱动输出对应的pwm电压信号,控制集成驱动对直流无刷电机输出有效电流的大小,实现对直流无刷电机速度的控制;
[0043]
步骤3:双备份控制功能的实现;具体步骤如下:
[0044]
步骤3.1:通过stm32-x的自检算法检测电机x电流信息与转速信息的自检信息;通过stm32-x的自检算法检测电机y电流信息与转速信息的自检信息;两个直流无刷电机包括电机x和电机y;
[0045]
若stm32-x发现无异常,则继续工作,若发现异常,则把对应的电机x或电机y的异常信息上报给stm32-z;
[0046]
步骤3.2:stm32-z接收到异常信息后,通过控制mosfet开关阵列a的控制栅极,关断出现问题的电机x或电机y的主控制系统,通过控制mosfet开关阵列b的控制栅极,打开出现问题的电机x或电机y的冷备份控制系统,由stm32-y控制的冷备份控制系统开始工作;
[0047]
步骤3.3:通过stm32-y的自检算法检测包含曾出现问题的飞轮轮体转速信息与对应直流无刷电机电流信息的自检信息;
[0048]
若核心处理器stm32-y发现无异常,则继续工作,若发现异常,则把该飞轮轮体的异常信息上报给核心处理器stm32-z;
[0049]
步骤3.4:stm32-z控制mosfet开关阵列b的控制栅极,关断出现问题的飞轮轮体的所有控制电路,同时,良好的飞轮轮体正常工作,对飞轮轮体的控制是通过对连接飞轮轮体的电机控制实现的;
[0050]
步骤4:同时,姿态控制下位机解算任务指令,控制磁力矩器进行角动量卸载。
[0051]
进一步的,步骤2中,对直流无刷电机速度的控制的步骤如下:
[0052]
将三个数字霍尔传感器按间隔120度的圆周分布来安装在电机x的底部,三个数字霍尔传感器输出波形相差120度电度角,输出信号中高、低电平各占180度电度角,规定输出信号高电平用“1”表示,低电平用“0”表示,单极对的电机转子每旋转一周输出6个不同的信号,当检测到三个霍尔传感器的值,则导通对应值的mos管;
[0053]
通过霍尔传感器有变化时核心处理器stm32定时器捕获到的值计算出一次换相的时间,n极对的直流无刷电机旋转一圈共有6n个变化信号,计算单位时间信号变化数量与直流无刷电机旋转一圈的信号变化数量做商,得到直流无刷电机的转速;
[0054]
在核心处理器中将获得的值与目标速度值进行pid算法调控,根据与目标转速的差值进行比例、积分和微分的函数关系进行运算,得出stm32-x所需输出占空比,之后stm32-x控制产生pwm波的功能模块产生对应占空比的pwm波输出给第一集成驱动与第二集成驱动,之后第一集成驱动与第二集成驱动按照接受到pwm波占空比的大小向mosfet开关阵列a的驱动隔离阵列x与驱动隔离阵列y的源极输出对应比例的有效电流,该有效电流通过mosfet开关阵列a的驱动隔离阵列x与驱动隔离阵列y源极和漏极之间的导通作用施加在电机x上,实现控制电机x转速,飞轮轮体通过轴承固定在直流无刷电机的转子上,最终实现控制飞轮x转速的目标。
[0055]
进一步的,步骤2中,飞轮轮体的工作模式为:接收到电流传感器的模拟信号后,stm32-x将模拟信号解算,输出控制信号以实现对直流无刷电机的电流力矩控制;具体包括:
[0056]
根据数字霍尔换相模式进行换相,在核心处理器中将获得的电流值与目标力矩电流值进行pid算法调控,根据与目标电流的差值进行比例、积分和微分的函数关系进行运算得出stm32-x所需输出占空比,之后stm32-x控制产生pwm波的功能模块产生对应占空比的pwm波输出给第一集成驱动与第二集成驱动,第一集成驱动与第二集成驱动按照接受到pwm波占空比的大小向mosfet开关阵列a的驱动隔离阵列x与驱动隔离阵列y的源极输出对应比例的有效电流,该有效电流通过mosfet开关阵列a的驱动隔离阵列x与驱动隔离阵列y源极和漏极之间的导通作用施加在电机x上,最终实现控制电机力矩的目标。
[0057]
进一步的,步骤3中,对自检异常信息的识别处理方式如下:
[0058]
核心处理器中adc所接收电流传感器的电流信息超过电机所能承受的最大连续电流时识别为异常信息,或者,核心处理器接收到的数字霍尔传感器的数字信号而解算出的电机转速信息与目标转速信息在进行10秒的调速后的仍出现100rpm的偏差时被识别为异常信息。
[0059]
进一步的,步骤4中,对磁力矩器的控制方式如下:
[0060]
星载中心计算机将卫星姿态调整信息下发给姿态控制下位机,姿态控制下位机将所需卸载的飞轮角动量信息下发给磁力矩器控制系统,在地心惯性参考系下,磁力矩器所需产生的磁力矩为:
[0061]
磁力矩器应产生的磁力矩t
mag
表示为式(i):
[0062]
t
mag
=-k(h
w-hn)
ꢀꢀ(i)[0063]
式(i)中,t
mag
为磁力矩器应产生的卸载力矩,k为待定的卸载增益,hw为要卸载的飞轮角动量,hn为预设的标称角动量向量,设为0。
[0064]
本发明的有益效果在于:
[0065]
1、本发明的飞轮结构结合卫星上自带的磁力矩器在降低飞轮数量的同时实现了飞轮的热备份,该设计思路极大地提高了飞轮结构的可靠性,延长了飞轮的使用寿命。
[0066]
2、本发明的飞轮控制系统采用冷备份的方式,该设计思路极大地提高了电路控制系统的可靠性,进一步延长了飞轮的使用寿命。
[0067]
3、本发明的定位为整颗卫星的部件,借助卫星上已有的磁力矩器,在比相似主流产品减少3台飞轮的基础上实现了更可靠的性能,减少了飞轮系统的质量,降低了成本,同时采用性价比更高的stm32核心处理器,与传统的dsp核心处理器相比,该处理器拥有相同性能、可靠性与更低的成本,最终在飞轮质量减小、成本降低的情况下获得了更高的可靠性、更长的使用寿命与更高的性价比,进一步扩大了微小卫星低成本的优势。
附图说明
[0068]
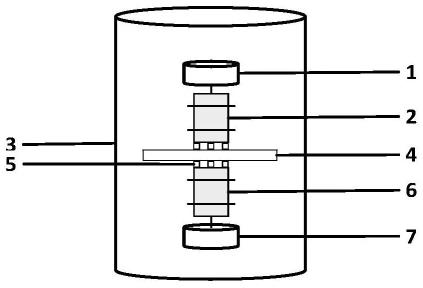
图1为本发明适用卫星s轴的结构与控制双备份反作用飞轮系统的结构示意图;
[0069]
图2为本发明的卫星姿态控制逻辑示意图;
[0070]
图3为本发明的具有冷备份功能的控制系统板原理示意图;
[0071]
图4为本发明的实现双备份功能的控制流程示意图;
[0072]
图5为实施例中介绍飞轮系统失去工作能力的概率图。
[0073]
1、飞轮轮体x,2、电机x,3、飞轮系统外壳,4、具有冷备份功能的控制系统板,5、数字霍尔传感器,6、电机y,7、飞轮轮体y。
具体实施方式
[0074]
下面结合附图对本发明进行详细描述。本实施例在以本发明技术方案为前提下进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
[0075]
实施例1
[0076]
一种适用卫星s轴的结构与控制双备份反作用飞轮系统,如图1所示,包括六个数字霍尔传感器5、两个飞轮轮体、两个直流无刷电机(以下简称“电机”)和一个具有冷备份功能的控制系统板4;
[0077]
其中,两个飞轮轮体分别位于卫星的s轴的上下两端,平行排列,并均与具有冷备份功能的控制系统板4相连;两个直流无刷电机均采用深圳市正元电机有限公司的am-bl2032an系列直流无刷电机;每三个数字霍尔传感器5彼此互为空间120
°
对称地安装在一个飞轮轮体的定子上,两个飞轮轮体材料为不锈钢9cr18mo,通过3mm直径的轴承固定在电机转子上;飞轮轮体通过轴承固定在直流无刷电机的转子上,直流无刷电机与具有冷备份功能的控制系统板4均固定在飞轮系统外壳3上。由一个具有冷备份功能的控制系统板4实现两个飞轮轮体的同时控制,降低了成本与功耗。
[0078]
实施例2
[0079]
根据实施例1所述的一种适用卫星s轴的结构与控制双备份反作用飞轮系统,其区别在于:
[0080]
如图3所示,具有冷备份功能的控制系统板4包括三个核心处理器stm32、四组集成驱动、四个电流传感器和两个mosfet开关阵列,三个核心处理器stm32包括stm32-x、stm32-y、stm32-z,四组集成驱动包括第一集成驱动(集成驱动1)、第二集成驱动(集成驱动2)、第三集成驱动(集成驱动3)、第四集成驱动(集成驱动4),四个电流传感器包括第一电流传感器(电流传感器1)、第二电流传感器(电流传感器2)、第三电流传感器(电流传感器3)、第四电流传感器(电流传感器4),两个mosfet开关阵列包括mosfet开关阵列a和mosfet开关阵列b,均集成在一张pcb电路板上,pcb电路板接口与直流无刷电机、数字霍尔传感器5之间使用导线连接。
[0081]
stm32-x与stm32-y型号相同,stm32-x与stm32-y中每个核心处理器至少集成有两组独立adc、一个uart、十八个gpio信号接口和产生十二路pwm波的功能模块;
[0082]
stm32-x与stm32-y的内部所集成模块完全相同,以stm32-x为例介绍内部功能模块以及与外部模块的连接关系,两组独立adc包括adcx、adcy,uart在图3中标注为uart,adcx与第一电流传感器的信号输出接口相连,adcy与第二电流传感器的信号输出接口相连,在十八个gpio信号接口中,六路gpio信号接口与第一集成驱动的控制信号输入接口相连,这六路gpio接口在图3中标注为pwmx&gpiox1,六路gpio信号接口与第二集成驱动的控制信号输入接口相连,在图3中标注为pwmy&gpioy1,三路gpio信号接口与mosfet开关阵列a的霍尔隔离阵列x相连,分别通过霍尔隔离阵列x接收被安装在电机x2下方的三个数字霍尔
传感器5的电压信息,在图3中标注为readingx&gpiox2,另外三路gpio信号接口与mosfet开关阵列a的霍尔隔离阵列y相连,分别通过霍尔隔离阵列y接收被安装在电机y6下方的三个数字霍尔传感器5的电压信息;在图3中标注为readingy&gpioy2。两个直流无刷电机包括电机x2和电机y6;
[0083]
stm32-y与stm32-x的连接关系不同之处在于,pwmx&gpiox1与第三集成驱动的控制信号输入接口相连,pwmy&gpioy1与第四集成驱动的控制信号输入接口相连,adcx与第三电流传感器的信号输出接口相连,adcy与第四电流传感器的信号输出接口相连,readingx&gpiox2与mosfet开关阵列b的霍尔隔离阵列x相连,readingy&gpioy2与mosfet开关阵列b霍尔隔离阵列y相连。
[0084]
stm32-z型号与前两者不同,stm32-z至少集成有一个can模块、两个uart、四个gpio信号接口,如图3所示,can模块在图3中标注为can,can模块与飞轮星上接口相连,用于与姿态控制下位机通信,两个uart包括第一uart和第二uart,在图3中标注为uart1与uart2,第一uart与stm32-x的uart相连,用于stm32-x与stm32-z的通信,第二uart与stm32-y的uart相连,用于stm32-y与stm32-z的通信,四个gpio信号接口中,两路gpio信号接口分别连接mosfet开关阵列a的控制栅极x与控制栅极y,对mosfet开关阵列a实现控制与供电,这两路gpio信号接口在图3中标注为选通器&gpiox,另外两路gpio信号接口分别连接mosfet开关阵列b的控制栅极x与控制栅极y,对mosfet开关阵列b实现控制与供电;这两路gpio信号接口在图3中标注为选通器&gpioy。
[0085]
每组独立的adc,用于采集电流模拟信号,进而解算出采样电流数字信号;每组集成驱动,用于响应核心处理器stm32输出的pwm控制电压,从而实现对飞轮的转速和力矩电流的实时控制;每个电流传感器,用于串联在其所对应的集成驱动和飞轮轮体间的主回路中,从而获得采样电流模拟信号,采样电流模拟信号经运放放大后输出给对应的一组adc。
[0086]
参考图3中的标注,主控制系统包括stm32-x、第一集成驱动、第二集成驱动、第一电流传感器、第二电流传感器;其中,第一集成驱动与第一电流传感器为电机x2及飞轮轮体x1的电路控制部分,第二集成驱动与第二电流传感器为电机y6及飞轮轮体y7的电路控制部分;两个飞轮轮体包括飞轮轮体x1和飞轮轮体y7;
[0087]
参考图3中的标注,冷备份控制系统包括stm32-y、第三集成驱动、第四集成驱动、第三电流传感器、第四电流传感器;
[0088]
两个mosfet开关阵列用于执行主控制系统与冷备份控制系统之间的隔离任务;
[0089]
参考图3中的标注,mosfet开关阵列a包括驱动隔离阵列x、霍尔隔离阵列x、驱动隔离阵列y、霍尔隔离阵列y、控制栅极x、控制栅极y;
[0090]
其中,驱动隔离阵列x与霍尔隔离阵列x分别包括三个mosfet晶体管,这六个mosfet晶体管的栅极互连形成控制栅极x,驱动隔离阵列x的三个mosfet晶体管的源极分别与第一集成驱动的u、v、w三个驱动输出接口相连,驱动隔离阵列x的三个mosfet晶体管的漏极分别与电机x2的u、v、w三个驱动输入接口相连,霍尔隔离阵列x的三个mosfet晶体管的源极分别与stm32-x的readingx&gpiox2的三路gpio信号接口相连,霍尔隔离阵列x的三个mosfet晶体管的漏极分别与电机x2下方安装的三个数字霍尔传感器5的三个信号输出接口相连,在控制栅极x处施加的电压高低控制驱动隔离阵列x与霍尔隔离阵列x中mosfet晶体管的源极与漏极之间的导通与关断,实现对飞轮轮体x1的主控制系统的导通与关断;
[0091]
驱动隔离阵列y与霍尔隔离阵列y分别包括三个mosfet晶体管,这六个mosfet晶体管的栅极互连形成控制栅极y,驱动隔离阵列y的三个mosfet晶体管的源极分别与第二集成驱动的u、v、w三个驱动输出接口相连,驱动隔离阵列y的三个mosfet晶体管的漏极分别与电机y6的u、v、w三个驱动输入接口相连,霍尔隔离阵列y的三个mosfet晶体管的源极分别与stm32-x的readingy&gpioy2的三路gpio信号接口相连,三个mosfet晶体管的漏极分别与电机y6下方安装的三个数字霍尔传感器5的三个信号输出接口相连,在控制栅极y处施加的电压高低控制驱动隔离阵列y与霍尔隔离阵列y中mosfet晶体管的源极与漏极之间的导通与关断,实现对飞轮轮体y7的主控制系统的导通与关断。
[0092]
stm32-x接收stm32-z下达的指令信息,与当前转速信息对比后,转化为具体的pwm电压控制信号,同时,stm32-x通过自检信息判断主控制系统功能与飞轮轮体是否正常,若不正常,则通过uart通信上报stm32-z,通过stm32-z控制mosfet开关阵列a和mosfet开关阵列b,将出现问题的电机与飞轮轮体的控制驱动系统切换为stm32-y对应的冷备份控制系统;
[0093]
stm32-z用于接受星载中心计算机下发到姿态控制下位机,发送至飞轮驱动系统的指令信息,并上报转速、加速度,是否启用备份系统等信息,同时接收stm32-x与stm32-y上报的转速、加速度与stm32-x的系统自检信息,从而决定是否控制mosfet开关阵列a和mosfet开关阵列b,将控制驱动系统切换为stm32-y对应的冷备份控制系统。
[0094]
stm32-x对应的主控制系统正常工作时,stm32-z对mosfet开关阵列a的控制栅极x和控制栅极y施加适当电压,驱动隔离阵列x、驱动隔离阵列y、霍尔隔离阵列x和霍尔隔离阵列y的源极和漏极之间导通,stm32-z对mosfet开关阵列b的控制栅极x和控制栅极y施加低电压,驱动隔离阵列x、驱动隔离阵列y、霍尔隔离阵列x和霍尔隔离阵列y的源极和漏极之间关断;
[0095]
stm32-x对应的主控制系统对电机x2进行控制的部分出现故障时,stm32-z对mosfet开关阵列a的控制栅极x施加低电压(0v),驱动隔离阵列x与霍尔隔离阵列x的源极和漏极之间关断,stm32-z对mosfet开关阵列b的控制栅极x施加高电压(3.3v),驱动隔离阵列x与霍尔隔离阵列x的源极和漏极之间导通,电机x2的主控制系统实现关闭,电机x2对应的冷备份控制系统开始工作;
[0096]
stm32-x对应的主控制系统对电机y6进行控制的部分出现故障时,stm32-z对mosfet开关阵列a的控制栅极y施加低电压(0v),驱动隔离阵列y与霍尔隔离阵列y的源极和漏极之间关断,stm32-z对mosfet开关阵列b的控制栅极y施加高电压(3.3v),驱动隔离阵列y与霍尔隔离阵列y的源极和漏极之间导通,电机y6的主控制系统实现关闭,电机y6对应的冷备份控制系统开始工作。
[0097]
stm32-x与stm32-y的型号均为stm32l4r5zit6,stm32-z的型号为stm32l4q5rgt6;电流传感器的型号为cc6920so-5a;mosfet开关阵列a和mosfet开关阵列b中的mosfet晶体管均选用n型mos管,型号为fds6930b;集成驱动的型号为drv8302dca。
[0098]
实施例3
[0099]
实施例2所述的适用卫星s轴的结构与控制双备份反作用飞轮系统的控制方法,如图4所示,步骤如下:
[0100]
步骤1:stm32-z通过can模块接收到姿态控制下位机分解的来自于星载中心计算
机下发的指令信号后,将指令信息解析并将转速控制信息下发到stm32-x;
[0101]
步骤2:stm32-x接收到控制指令后,进行直流无刷电机的控制,两个飞轮轮体同时执行工作指令,实现热备份,其上连接的数字霍尔传感器5的gpio信号接口接收到电平信息,得以确定直流无刷电机转子位置,对直流无刷电机转子位置进行解算后,向集成驱动输出对应的pwm电压信号,控制集成驱动对直流无刷电机输出有效电流的大小,实现对直流无刷电机速度的控制;
[0102]
步骤3:双备份控制功能的实现;具体步骤如下:
[0103]
步骤3.1:通过stm32-x的自检算法检测电机x2电流信息与转速信息的自检信息;通过stm32-x的自检算法检测电机y6电流信息与转速信息的自检信息;两个直流无刷电机包括电机x2和电机y6;
[0104]
若stm32-x发现无异常,则继续工作,若发现异常,则把对应的电机x2或电机y6的异常信息上报给stm32-z;
[0105]
步骤3.2:stm32-z接收到异常信息后,通过控制mosfet开关阵列a的控制栅极,关断出现问题的电机x2或电机y6的主控制系统,通过控制mosfet开关阵列b的控制栅极,打开出现问题的电机x2或电机y6的冷备份控制系统,由stm32-y控制的冷备份控制系统开始工作;
[0106]
步骤3.3:通过stm32-y的自检算法检测包含曾出现问题的飞轮轮体转速信息与对应直流无刷电机电流信息的自检信息;
[0107]
若核心处理器stm32-y发现无异常,则继续工作,若发现异常,则把该飞轮轮体的异常信息上报给核心处理器stm32-z;
[0108]
步骤3.4:stm32-z控制mosfet开关阵列b的控制栅极,关断出现问题的飞轮轮体的所有控制电路,同时,良好的飞轮轮体正常工作,对飞轮轮体的控制是通过对连接飞轮轮体的电机控制实现的;
[0109]
步骤4:同时,姿态控制下位机解算任务指令,控制磁力矩器进行角动量卸载。
[0110]
图2所示,详细介绍了一种适用卫星s轴的结构与控制双备份反作用飞轮系统的卫星姿态控制逻辑。星载中心计算机与姿态控制下位机进行信息交互将姿态调整信息下发到姿态控制下位机,姿态控制下位机解算任务指令,通过与磁力矩器控制系统的信息交互将解算得到的角动量卸载信息下发到磁力矩器控制系统,控制磁力矩器x、磁力矩器y、磁力矩器z工作,进行角动量卸载,同时,通过与飞轮控制系统的信息交互将解算得到的所需角动量信息下发到飞轮控制系统,控制位于s轴的飞轮工作,获得角动量。
[0111]
步骤2中,对直流无刷电机速度的控制的步骤如下:
[0112]
将三个数字霍尔传感器5按间隔120度的圆周分布来安装在电机x2的底部,三个数字霍尔传感器5输出波形相差120度电度角,输出信号中高、低电平各占180度电度角,规定输出信号高电平用“1”表示,低电平用“0”表示,单极对的电机转子每旋转一周输出6个不同的信号,当检测到三个霍尔传感器的值,则导通对应值的mos管;
[0113]
按照下面的逆时针旋转顺序参考表表1,三个数字霍尔传感器5(霍尔a、霍尔b和霍尔c)分别为0、0和1,则导通电机b-和c+对应的mos管,其他mos管都要处于截止状态。当导通对应的mos管后电机就会旋转一个角度,旋转到下一个霍尔值改变为101,这时在关闭b-和c+,导通a+和b-,这样电机有将会旋转一个角度直到下一个霍尔值改变,只要按照检测到霍
尔值,导通对应的mos管,电机就可按逆时针方向旋转,若使得电机按照顺时针方向旋转可参照下述顺时针旋转顺序参照表表2。
[0114]
表1为逆时针旋转顺序参考表;
[0115]
表1
[0116]
霍尔a霍尔b霍尔ca+a-b+b-c+c-001xxx导通导通x101导通xx导通xx100导通xxxx导通110xx导通xx导通010x导通导通xxx011x导通xx导通 [0117]
注:表1中x表示截止状态,即非导通状态。
[0118]
表2为顺时针旋转顺序参考表;
[0119]
表2
[0120]
霍尔a霍尔b霍尔ca+a-b+b-c+c-001xx导通xx导通101x导通导通xxx100x导通xx导通x110xxx导通导通x010导通xx导通xx011导通xxxx导通
[0121]
注:表2中x表示截止状态,即非导通状态。
[0122]
通过霍尔传感器有变化时核心处理器stm32定时器捕获到的值计算出一次换相的时间,n极对的直流无刷电机旋转一圈共有6n个变化信号,计算单位时间信号变化数量与直流无刷电机旋转一圈的信号变化数量做商,得到直流无刷电机的转速;例如,直流无刷电机为n极对的电机,旋转一圈共有6n个变化信号,如果最近3次单位时间(1min)检测到信号变化数量为v1、v2、v3,则得出电机转速为利用求平均值的方法实现了滤波的效果。本实施例中,通过霍尔传感器有变化时核心处理器stm32定时器捕获到的值计算出一次换相的时间,am-bl2032an系列直流无刷电机为1极对的电机,旋转一圈共有6个变化信号,如果最近3次单位时间(1min)检测到信号变化数量为3600、3500、3700,则得出电机转速为利用求平均值的方法实现了滤波的效果。
[0123]
在核心处理器中将获得的值与目标速度值进行pid算法调控,根据与目标转速的差值进行比例、积分和微分的函数关系进行运算,得出stm32-x所需输出占空比,之后stm32-x控制产生pwm波的功能模块产生对应占空比的pwm波输出给第一集成驱动与第二集成驱动,之后第一集成驱动与第二集成驱动按照接受到pwm波占空比的大小向mosfet开关阵列a的驱动隔离阵列x与驱动隔离阵列y的源极输出对应比例的有效电流,该有效电流通过mosfet开关阵列a的驱动隔离阵列x与驱动隔离阵列y源极和漏极之间的导通作用施加在
电机x2上,实现控制电机x2转速,飞轮轮体通过轴承固定在直流无刷电机的转子上,最终实现控制飞轮x转速的目标。
[0124]
步骤2中,飞轮轮体的工作模式为:接收到电流传感器的模拟信号后,stm32-x将模拟信号解算,输出控制信号以实现对直流无刷电机的电流力矩控制;具体包括:
[0125]
根据数字霍尔换相模式进行换相,在核心处理器中将获得的电流值与目标力矩电流值进行pid算法调控,根据与目标电流的差值进行比例、积分和微分的函数关系进行运算得出stm32-x所需输出占空比,之后stm32-x控制产生pwm波的功能模块产生对应占空比的pwm波输出给第一集成驱动与第二集成驱动,第一集成驱动与第二集成驱动按照接受到pwm波占空比的大小向mosfet开关阵列a的驱动隔离阵列x与驱动隔离阵列y的源极输出对应比例的有效电流,该有效电流通过mosfet开关阵列a的驱动隔离阵列x与驱动隔离阵列y源极和漏极之间的导通作用施加在电机x2上,最终实现控制电机力矩的目标。
[0126]
步骤3中,对自检异常信息的识别处理方式如下:
[0127]
核心处理器中adc所接收电流传感器的电流信息超过电机所能承受的最大连续电流时识别为异常信息,或者,核心处理器接收到的数字霍尔传感器5的数字信号而解算出的电机转速信息与目标转速信息在进行10秒的调速后的仍出现100rpm的偏差时被识别为异常信息。
[0128]
步骤4中,对磁力矩器的控制方式如下:
[0129]
星载中心计算机将卫星姿态调整信息下发给姿态控制下位机,姿态控制下位机将所需卸载的飞轮角动量信息下发给磁力矩器控制系统,在地心惯性参考系下,磁力矩器所需产生的磁力矩为:
[0130]
磁力矩器应产生的磁力矩t
mag
表示为式(i):
[0131]
t
mag
=-k(h
w-hn)
ꢀꢀ(i)[0132]
式(i)中,t
mag
为磁力矩器应产生的卸载力矩,k为待定的卸载增益,hw为要卸载的飞轮角动量,hn为预设的标称角动量向量,设为0。例如,在要卸载的飞轮角动量hw=10n
·m·
s,方向为s轴正向,k=10时,t
mag
=-100n
·m·
s,方向为s轴正向。
[0133]
通过本实施例,结合图3-4,进一步说明适用卫星s轴的结构与控制双备份反作用飞轮系统双备份功能的实现:
[0134]
假设电机x2与电机y6正以1000rpm的转速匀速转动,此时目标转速为1000rpm,假设第一集成驱动失灵。此时第一集成驱动仍在接受stm32-x的pwm信号,但是第一集成驱动已经丧失电流输出能力,10s后电机x2转速降为0rpm,与目标转速1000rpm相差超过100rpm,此时识别电机x2或其主控制系统出现异常,stm32-z对mosfet开关阵列a的控制栅极x的电压输出由高电平(3.3v)转为低电平(0v),mosfet开关阵列a的驱动隔离阵列x与霍尔隔离阵列x的源极与漏极之间断开,完成电机x2与第一集成驱动之间断路,实现电机x2下方三个数字霍尔传感器5与stm32-x之间断路,stm32-z对mosfet开关阵列b的控制栅极y的电压输出由低电平(0v)转为高电平(3.3v),mosfet开关阵列b的驱动隔离阵列x与霍尔隔离阵列x的源极与漏极之间导通,完成电机x2与集成驱动3之间的导通,实现电机x2下方三个数字霍尔传感器5与stm32-y之间的导通,此时电机x2的冷备份控制系统开始工作,电机x2的工作恢复正常。实现了控制系统的冷备份功能。
[0135]
假设电机x2与电机y6正以1000rpm的转速匀速转动,此时目标转速为1000rpm,假
设电机x2烧坏。电机x2烧坏失去转动能力,转速将为0,电机x2出现问题10s后,电机x2转速仍为0rpm,与目标转速1000rpm相差超过100rpm,此时识别电机x2或其主控制系统出现异常,stm32-z对mosfet开关阵列a的控制栅极x的电压输出由高电平(3.3v)转为低电平(0v),mosfet开关阵列a的驱动隔离阵列x与霍尔隔离阵列x的源极与漏极之间断开,完成电机x2与第一集成驱动之间断路,实现电机x2下方三个数字霍尔传感器5与stm32-x之间断路,stm32-z对mosfet开关阵列b的控制栅极y的电压输出由低电平(0v)转为高电平(3.3v),mosfet开关阵列b的驱动隔离阵列x与霍尔隔离阵列x的源极与漏极之间导通,完成电机x2与第三集成驱动之间的导通,实现电机x2下方三个数字霍尔传感器5与stm32-y之间的导通,此时电机x2的冷备份控制系统开始工作,但电机x2烧坏仍无法正常工作,冷备份控制系统工作10s后电机转速仍为0rpm,与目标转速1000rpm相差超过100rpm,此时识别电机x2或其冷备份控制系统出现异常,stm32-z对mosfet开关阵列b的控制栅极x的电压输出由高电平(3.3v)转为低电平(0v),mosfet开关阵列b的驱动隔离阵列x与霍尔隔离阵列x的源极与漏极之间断开,完成电机x2与集成驱动3之间断路,实现电机x2下方三个数字霍尔传感器5与stm32-y之间断路,放弃电机x2的使用,此时电机y6仍在主控制系统的控制下以1000rpm的转速匀速转动。实现了该飞轮系统的结构热备份功能。
[0136]
通过本实施例结合图5进一步说明适用卫星s轴的结构与控制双备份反作用飞轮系统及其控制方法的有益效果:
[0137]
假设单控制系统工作五年后正常工作的概率为90%,单电机及其飞轮轮体共同正常工作的概率为90%,则电子元件相同的情况下:
[0138]
无备份的单控制系统及单飞轮结构的工作系统丧失工作能力的概率为:
[0139]
p1=(1-0.9
×
0.9)
×
100%=19%
[0140]
控制系统双备份而飞轮结构单备份的工作系统丧失工作能力的概率为:
[0141]
p2=[1-0.9
×
(1-0.1
×
0.1)]
×
100%=10.9%
[0142]
本发明介绍的适用卫星s轴的结构与控制双备份反作用飞轮系统丧失工作能力的概率为:
[0143]
p3=[1-0.9
×
(1-0.1
×
0.1)]
×
[1-0.9
×
(1-0.1
×
0.1)]
×
100%=1.2%
[0144]
如图5所示,相同元件的工作系统在工作五年后,单控制系统及单飞轮结构的工作系统丧失工作能力的概率为19%的情况下,本发明适用卫星s轴的结构与控制双备份反作用飞轮系统丧失工作能力的概率为仅为1.2%,将系统的可靠性提高了十倍以上。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1