一种带数据测量采集的可折叠植保无人机的制作方法
1.本发明涉及一种植保设备技术领域,具体是一种带数据测量采集的可折叠植保无人机。
背景技术:
2.植保无人机是用于农林植物保护作业的无人驾驶飞机,农业植保作业需要采集植被信息,人工采集效率低,现有技术中通过测绘无人机应用到植保上,可以采集到植被的高精度的三维图像。但现有技术中利用单镜头进行数据采集,分辨率有限,采集范围较小,而搭载多镜头需要根据不同高度调节每个镜头的姿态以获取正确的图像信息,且在高空中无人机的稳定性较差,容易摇晃对采集精度造成影响。
3.因此,有必要提供一种带数据测量采集的可折叠植保无人机,以解决上述背景技术中提出的问题。
技术实现要素:
4.为实现上述目的,本发明提供如下技术方案:一种带数据测量采集的可折叠植保无人机,包括圆形的壳体,所述壳体侧壁圆周均匀分布地固定有六根沿壳体径向延伸的外筒,每根所述外筒中可伸缩地设有内杆,所述内杆末端固定有螺旋桨,所述壳体下方中心固定有竖直的中心轴,所述中心轴下方固定有固定盘,所述固定盘圆周均匀分布地固定有三根沿径向延伸的滑槽杆,且三根所述滑槽杆分别与三根所述外筒平行,每根所述滑槽杆中设有采集镜头,所述底座下方还圆周分布地固定有三根支撑架,且每根所述支撑架分别分布在滑槽杆的间隙中。
5.进一步的,作为优选,所述外筒下部开设有槽口,每根所述内杆中固定有贯穿槽口的连接杆,所述连接杆中铰接有开合连杆,每根所述开合连杆的另一端铰接到滑动套中,所述滑动套可上下滑动地套设在中心轴中。
6.进一步的,作为优选,所述滑槽杆开设有上下贯通的滑槽,所述滑槽中可滑动地设有滑块,所述滑块通过转动块可转动地与采集镜头连接。
7.进一步的,作为优选,与所述滑槽杆平行的三根外筒对应的连接杆的下端延伸至贯穿滑槽杆并与所述滑块固定连接。
8.进一步的,作为优选,所述转动块的转轴中固定有曲杆,所述曲杆的另一端铰接有转动连杆,所述转动连杆的另一端铰接到固定盘中。
9.进一步的,作为优选,每根所述支撑架下端可滑动地设有设有能够伸出的延伸支架。
10.进一步的,作为优选,所述延伸支架中铰接有支架连杆,所述支架连杆的另一端铰接到滑动套中。
11.进一步的,作为优选,所述滑动套两侧固定有竖直的导向轴,所述导向轴可滑动地贯穿壳体,所述导向轴在壳体上的一端共同固定到伸缩杆的活塞杆中,所述伸缩杆的缸体
固定连接到壳体中。
12.与现有技术相比,本发明的有益效果是:
13.本发明中,当滑动套上下滑动时通过开合连杆的推动能够同时带动每根内杆滑动,从而使螺旋桨的范围扩张或收缩,以适应不同高度的作业,保证无人机的的灵活性和稳定性。
14.本发明中,当内杆滑动时螺旋桨的范围扩张或收缩时对应的连接杆带动每个采集镜头同步沿滑槽杆移动,当采集镜头向远离中心轴的方向移动时转动连杆带动采集镜头向远离中心轴的方向转动,使三个采集镜头共同采集的图像范围更大。
15.本发明中,当滑动套上下滑动时通过支架连杆的推动能够同时带动延伸支架伸出或缩回支撑架内,且当内杆收缩时延伸支架伸出至低于采集镜头的位置,以保护采集镜头,而当内杆张开时,延伸支架缩回支撑架内,避免遮挡采集镜头。
附图说明
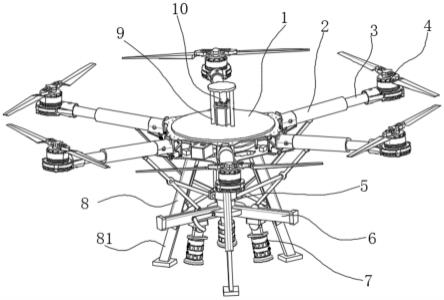
16.图1为一种带数据测量采集的可折叠植保无人机的结构示意图;
17.图2为滑槽杆和采集镜头的结构示意图;
18.图3为支撑架的结构示意图;
19.图中:1、壳体;2、外筒;3、内杆;4、螺旋桨;5、中心轴;51、固定盘;52、滑动套;53、开合连杆;54、支架连杆;55、连接杆;6、滑槽杆;7、采集镜头;71、滑块;72、转动块;73、曲杆;74、转动连杆;8、支撑架;81、延伸支架;9、导向轴;10、伸缩杆。
具体实施方式
20.请参阅图1,本发明实施例中,一种带数据测量采集的可折叠植保无人机,包括圆形的壳体1,所述壳体1侧壁圆周均匀分布地固定有六根沿壳体1径向延伸的外筒2,每根所述外筒2中可伸缩地设有内杆3,所述内杆3末端固定有螺旋桨4,所述壳体1下方中心固定有竖直的中心轴5,所述中心轴5下方固定有固定盘51,所述固定盘51圆周均匀分布地固定有三根沿径向延伸的滑槽杆6,且三根所述滑槽杆6分别与三根所述外筒2平行,每根所述滑槽杆6中设有采集镜头7,所述底座1下方还圆周分布地固定有三根支撑架8,且每根所述支撑架8分别分布在滑槽杆6的间隙中。
21.请参阅图2,本实施例中,所述外筒2下部开设有槽口,每根所述内杆3中固定有贯穿槽口的连接杆55,所述连接杆55中铰接有开合连杆53,每根所述开合连杆53的另一端铰接到滑动套52中,所述滑动套52可上下滑动地套设在中心轴5中。也就是说,当滑动套52上下滑动时通过开合连杆53的推动能够同时带动每根内杆3滑动,从而使螺旋桨4的范围扩张或收缩,以适应不同高度的作业,保证无人机的的灵活性和稳定性。
22.本实施例中,所述滑槽杆6开设有上下贯通的滑槽,所述滑槽中可滑动地设有滑块71,所述滑块71通过转动块72可转动地与采集镜头7连接。
23.本实施例中,与所述滑槽杆6平行的三根外筒2对应的连接杆55的下端延伸至贯穿滑槽杆6并与所述滑块71固定连接。当内杆3滑动时螺旋桨4的范围扩张或收缩时对应的连接杆55带动每个采集镜头7同步沿滑槽杆6移动。
24.本实施例中,所述转动块72的转轴中固定有曲杆73,所述曲杆73的另一端铰接有
转动连杆74,所述转动连杆74的另一端铰接到固定盘51中,也就是说,当采集镜头7向远离中心轴5的方向移动时转动连杆74带动采集镜头7向远离中心轴5的方向转动,使三个采集镜头7共同采集的图像范围更大。
25.本实施例中,每根所述支撑架8下端可滑动地设有设有能够伸出的延伸支架81。
26.本实施例中,所述延伸支架81中铰接有支架连杆54,所述支架连杆54的另一端铰接到滑动套52中。也就是说,当滑动套52上下滑动时通过支架连杆54的推动能够同时带动延伸支架81伸出或缩回支撑架8内,且当内杆3收缩时延伸支架81伸出至低于采集镜头7的位置,以保护采集镜头7,而当内杆3张开时,延伸支架81缩回支撑架8内,避免遮挡采集镜头7。
27.本实施例中,所述滑动套52两侧固定有竖直的导向轴9,所述导向轴9可滑动地贯穿壳体1,所述导向轴9在壳体1上的一端共同固定到伸缩杆10的活塞杆中,所述伸缩杆10的缸体固定连接到壳体1中。通过伸缩杆10的伸缩能够带动滑动套52上下滑动。
28.具体实施时,无人机在初始状态下,伸缩杆10使滑动套52滑动到最低位置,每根内杆3收缩到外筒2内,延伸支架81伸出至低于采集镜头7的位置,以保护采集镜头7并支撑地面,无人机起飞后随着高度升高,伸缩杆10伸长使滑动套52向上滑动,开合连杆53推动每根内杆3滑动,使螺旋桨4的范围扩张,提高无人机的稳定性,同时对应的连接杆55带动每个采集镜头7同步沿滑槽杆6移动,在转动连杆74的作用下采集镜头7向远离中心轴5的方向转动,扩大三个采集镜头7共同采集的图像范围,同时支架连杆54的推动延伸支架81缩回支撑架8内,避免遮挡采集镜头7。
29.以上所述的,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1