一种柔性折叠变形扑翼飞行器
1.本发明涉及机器人技术领域,特别是涉及一种柔性折叠变形扑翼飞行器。
背景技术:
2.仿鸟扑翼飞行器是一种可以像鸟一样通过扑动翅膀实现飞行的新型飞行器,它具有体积小、质量轻、隐蔽性强、灵活性高等优点,应用前景广泛。围绕这一课题,各国已经研制出了可控飞行的扑翼飞行器,但这些扑翼飞行器距离实用无人机系统的飞行器平台都有一定的距离,这主要体现为飞行时间有限,有效载荷小,操纵控制难度大等方面。究其原因,机翼的气动效率低、功率消耗大、仿生程度低、可靠性差是相当重要的因素。
3.目前大部分扑翼飞行器为仿昆虫和仿鸟飞行器,仿蝙蝠飞行器较少,现有的仿生蝙蝠扑翼飞行器大部分只能做到上下扑动,机翼呈平板状,无法实现折叠展开运动,飞行效率远不如生物蝙蝠。即使有的仿蝙蝠扑翼飞行器中加入了收拢展开的机构,由于两者并没有耦合,加大了控制难度,同时也受限于拍动频率与收拢展开频率难匹配,很容易造成飞行运动混乱,达不到预期的目标。
4.中国专利公开号cn106043692a,发明名称为一种翅膀具有三自由度的扑翼飞行器。该发明提供了一种集合扑翼挥拍、扭转、弯曲折叠的仿鸟两段式扑翼,驱动机构为平面曲柄摇杆,采用前后两个舵机分别控制尾翼的上下摆动和左右翻转。虽然能实现多自由度运动,但驱动件多,质量大,结构复杂,不易微型化。
5.中国专利公开号cn109592031a,发明名称为单侧单节点的仿生扑翼飞行器。该发明能实现机翼的主动折叠,靠绳拉动翅膀实现收拢,靠弹簧实现展开,拍动幅度有限,在绳和弹簧的弹性作用下,会存在震荡扰动问题,也很难做到同步运动。
6.中国专利公开号cn109592032a,发明名称为单侧多节点的仿生扑翼飞行器。该发明在电机的输出轴上安装有绕线轮,电机正转时,绳索被顺向缠绕,机翼折叠。电机反转时,绳索松弛,弹簧压缩,机翼展开。该发明机构运动需要靠电机的正反转来实现,翅膀是在弹簧的作用下展开,运动存在滞后性。
7.综上所述,现有的扑翼飞行器无法在拍动的同时实现收拢展开功能的拍动机构,更无法真实的模拟蝙蝠翅膀的拍动,结构复杂以及飞行效率低的问题。
技术实现要素:
8.本发明的目的是提供一种柔性折叠变形扑翼飞行器,以解决现有技术存在的问题。
9.为实现上述目的,本发明提供了如下方案:本发明提供一种柔性折叠变形扑翼飞行器,包括机身骨架,所述机身骨架的前端安装有翅膀扑动机构;所述机身骨架的中部安装有折叠驱动装置;所述机身骨架两侧分别设置有前肢主动变形机构,两所述前肢主动变形机构沿所述机身骨架的两侧对称设置,所述前肢主动变形机构分别与所述翅膀扑动机构、所述折叠驱动装置铰接;所述机身骨架的尾端安装有腿部主动变形机构;所述机身骨架上
安装有控制系统,所述翅膀扑动机构、所述折叠驱动装置、所述腿部主动变形机构均与所述控制系统电性连接;所述飞行器上表面罩设有蒙皮,所述前肢主动变形机构、所述腿部主动变形机构分别与所述蒙皮底面胶接;
10.所述翅膀扑动机构用于实现飞行器上下扑翼运动;
11.所述折叠驱动装置用于提供机翼折叠与展开过程所需的驱动力;
12.所述腿部主动变形机构用于实现扑翼飞行器的俯仰和转弯运动。
13.优选的,所述前肢主动变形机构包括仿生手臂、仿生手腕和仿生手指;
14.所述仿生手臂包括相互铰接的小臂杆和大臂杆,所述小臂杆的长度小于所述大臂杆的长度,所述小臂杆一端与所述翅膀扑动机构铰接,所述大臂杆的一端与所述折叠驱动装置铰接,所述小臂杆远离所述翅膀扑动机构的一端铰接有小臂支撑杆的一端;
15.所述仿生手腕包括腕杆,所述大臂杆远离所述翅膀扑动机构的一端与所述腕杆一端铰接,所述小臂支撑杆远离另一端与所述腕杆的中部铰接;
16.所述仿生手指包括第一仿生指、第二仿生指和第三仿生指,所述第二仿生指与所述腕杆远离所述大臂杆的一端固定连接,所述第一仿生指和所述第三仿生指分别与所述腕杆铰接,所述小臂支撑杆上铰接有第一连杆一端,所述第一连杆的另一端铰接有铰接座,所述铰接座与所述第三仿生指滑动连接;所述大臂杆靠近所述腕杆的一端铰接有第二连杆一端,所述第二连杆另一端与所述第一仿生指铰接;
17.所述小臂杆、所述大臂杆、所述小臂支撑杆、所述第一仿生指、所述第二仿生指和所述第三仿生指均与所述蒙皮胶接。
18.优选的,所述折叠驱动装置包括固定连接在所述机身骨架上的直线导轨,所述直线导轨轴线与所述机身骨架轴线平行,所述直线导轨顶面滑动连接有滑块,所述滑块后端铰接有折叠连杆的一端,所述机身骨架顶端固定连接有折叠舵机座,所述折叠舵机座上固定连接有折叠舵机,所述折叠舵机的输出端固定连接有舵臂,所述舵臂一端与所述折叠连杆另一端转动连接;所述滑块两侧分别安装有万向节,所述大臂杆通过所述万向节与所述滑块铰接,所述折叠舵机与所述控制系统电性连接。
19.优选的,所述翅膀扑动机构包括固定连接在所述机身骨架上的无刷电机,所述无刷电机的输出端固定连接有第一齿轮,所述机身骨架的两侧分别安装有齿轮组,两所述齿轮组传动配合,所述第一齿轮与任一所述齿轮组传动配合,两所述齿轮组上分别安装有曲柄,所述曲柄转动连接有摇杆一端,所述摇杆另一端转动连接有连杆中部,所述机身骨架上安装有水平转轴,所述连杆一端开设有长通孔,所述连杆通过所述长通孔转动连接在所述水平转轴上,所述连杆另一端安装有竖直转轴,所述大臂杆通过所述竖直转轴与所述连杆转动连接,所述无刷电机与所述控制系统电性连接。
20.优选的,所述机身骨架上转动连接有水平转轴,所述齿轮组包括第二齿轮,两所述齿轮组的所述第二齿轮分别固定连接在所述水平转轴的两端,所述第一齿轮与任一所述第二齿轮啮合,所述第二齿轮远离所述机身骨架的一侧同轴固接有第三齿轮,所述机身骨架上转动连接有第四齿轮,所述第三齿轮与所述第四齿轮啮合,所述曲柄同轴固接在所述第四齿轮远离所述机身骨架的一侧。
21.优选的,所述腿部主动变形机构的数量为两个,两所述腿部主动变形机构对称设置在所述机身骨架尾部的两侧,所述腿部主动变形机构包括第一舵机,所述第一舵机的输
出轴竖向设置,所述第一舵机上安装有第一舵机座,所述第一舵机通过所述第一舵机座固定在所述机身骨架上,所述第一舵机的输出轴固定连接有第二舵机座,所述第二舵机座上固定连接有第二舵机,所述第一舵机座的输出轴和所述第二舵机的输出轴相互正交,所述第二舵机上转动连接有u型卡件,所述u型卡件上固定连接有腿部连杆,所述腿部连杆与所述蒙皮胶接,所述第一舵机和所述第二舵机分别与控制系统电性连接。
22.优选的,所述控制系统包括接收机、机载控制器和舵机扩展板,所述接收机、机载控制器和舵机扩展板均固定在所述机身骨架上,所述舵机扩展板与所述机载控制器均采用spi通信方式。
23.优选的,所述机身骨架上安装有供电装置,所述供电装置包括锂电池和辅助电源,所述机身骨架上固定有电池座,所述锂电池通过所述电池座固定在所述机身骨架上,所述供电装置用于为飞行器供电。
24.本发明公开了以下技术效果:本发通过前肢主动变形机构准确模仿蝙蝠飞行动作,实现上扑时翅膀折叠,下扑时翅膀打开,通过折叠驱动装置实现机翼折叠与展开过程的循环,通过腿部变形机构动态调整扑翼飞行器的俯仰和转弯运动,通过控制系统实现机器人机身、翅膀和腿部的协调运动,本发明仿生程度高结构简单,仿生度高,容易微型化,并且结构紧凑,左右对称性好。
25.本发明的扑翼飞行器能够根据飞行环境和飞行任务的不同自适应改变翼型,始终保持飞行效能最优。
附图说明
26.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
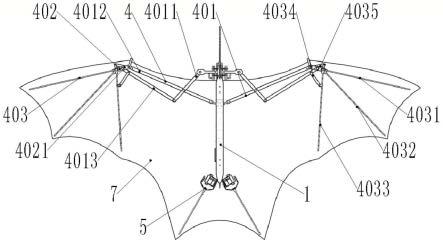
27.图1为本发明的俯视图;
28.图2为本发明机翼在半折叠状态时的结构示意图;
29.图3为本发明机翼上扑至最高点时的状态效果图;
30.图4为本发明的轴测图;
31.图5为本发明折叠驱动装置的轴测图
32.图6为本发明机翼下扑至最低点时的状态效果图;
33.图7为本发明腿部主动变形机构的结构示意图;
34.图8为本发明翅膀扑动机构和折叠驱动装置的结构示意图;
35.图9为本发明前肢主动变形机构的结构示意图。
36.其中,1、机身骨架;2、翅膀扑动机构;3、折叠驱动装置;4、前肢主动变形机构;5、腿部主动变形机构;6、控制系统;7、蒙皮;8、供电装置;401、仿生手臂;402、仿生手腕;403、仿生手指;4011、小臂杆;4012、大臂杆;4013、小臂支撑杆;4021、腕杆;4031、第一仿生指;4032、第二仿生指;4033、第三仿生指;4034、第一连杆;4035、第二连杆;301、直线导轨;302、滑块;303、折叠连杆;304、折叠舵机座;305、折叠舵机;306、舵臂;307、万向节;201、无刷电机;202、第一齿轮;203、曲柄;204、摇杆;205、连杆;206、第二齿轮;207、第三齿轮;208、第四
齿轮;501、第一舵机;502、第一舵机座;503、第二舵机座;504、第二舵机;505、u型卡件;506、腿部连杆;601、接收机;602、机载控制器;603、舵机扩展板;801、锂电池;802、辅助电源;803、电池座。
具体实施方式
37.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
38.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
39.实施例1:
40.参照图1-9,本发明提供一种柔性折叠变形扑翼飞行器,包括机身骨架1,机身骨架1的前端安装有翅膀扑动机构2;机身骨架1的中部安装有折叠驱动装置3;机身骨架1两侧分别设置有前肢主动变形机构4,两前肢主动变形机构4沿机身骨架1的两侧对称设置,前肢主动变形机构4分别与翅膀扑动机构2、折叠驱动装置3铰接;机身骨架1的尾端安装有腿部主动变形机构5;机身骨架1上安装有控制系统6,翅膀扑动机构2、折叠驱动装置3、腿部主动变形机构5均与控制系统6电性连接;飞行器上表面罩设有蒙皮7,前肢主动变形机构4、腿部主动变形机构5分别与蒙皮7底面胶接;
41.翅膀扑动机构2用于实现飞行器上下扑翼运动;
42.折叠驱动装置3用于提供机翼折叠与展开过程所需的驱动力;
43.腿部主动变形机构5用于实现扑翼飞行器的俯仰和转弯运动。
44.本发明所称的前端为飞行器运行的前方,尾端为飞行器运行的后方。
45.机身骨架1主要用于安装各部件,由复合材料或轻质金属切割而成,通过前肢主动变形机构4准确模仿蝙蝠飞行动作,实现上扑时翅膀折叠,下扑时翅膀打开,通过折叠驱动装置3实现机翼折叠与展开过程的循环,通过腿部变形机构动态调整扑翼飞行器的俯仰和转弯运动,通过控制系统6实现机器人机身、翅膀和腿部的协调运动。
46.进一步优化方案,前肢主动变形机构4包括仿生手臂401、仿生手腕402和仿生手指403;
47.仿生手臂401包括相互铰接的小臂杆4011和大臂杆4012,小臂杆4011的长度小于大臂杆4012的长度,小臂杆4011一端与翅膀扑动机构2铰接,大臂杆4012的一端与折叠驱动装置3铰接,小臂杆4011远离翅膀扑动机构2的一端铰接有小臂支撑杆4013的一端;
48.仿生手腕402包括腕杆4021,大臂杆4012远离翅膀扑动机构2的一端与腕杆4021一端铰接,小臂支撑杆4013远离另一端与腕杆4021的中部铰接;
49.仿生手指403包括第一仿生指4031、第二仿生指4032和第三仿生指4033,第二仿生指4032与腕杆4021远离大臂杆4012的一端固定连接,第一仿生指4031和第三仿生指4033分别与腕杆4021铰接,小臂支撑杆4013上铰接有第一连杆4034一端,第一连杆4034的另一端铰接有铰接座,铰接座与第三仿生指4033滑动连接;大臂杆4012靠近腕杆4021的一端铰接有第二连杆4035一端,第二连杆4035另一端与第一仿生指4031铰接;
50.小臂杆4011、大臂杆4012、小臂支撑杆4013、第一仿生指4031、第二仿生指4032和第三仿生指4033均与蒙皮7胶接。
51.蒙皮7采用弹性硅胶膜,翅膀骨架完全展开时,蒙皮7处于绷紧状态。
52.大臂杆4012按照2:1的比例划分为大臂杆4012a和大臂杆4012b两端,小臂杆4011按照2:5的比例划分为小臂杆4011a和小臂杆4011b,划分点为大臂杆4012和小臂杆4011的铰接点,大臂杆4012a一端与翅膀扑动机构2铰接,小臂杆4011a一端与折叠驱动装置3铰接,分别用于模仿蝙蝠翅膀骨骼的肱骨和挠骨。
53.进一步优化方案,折叠驱动装置3包括固定连接在机身骨架1上的直线导轨301,直线导轨301轴线与机身骨架1轴线平行,直线导轨301顶面滑动连接有滑块302,滑块302后端铰接有折叠连杆303的一端,机身骨架1顶端固定连接有折叠舵机座304,折叠舵机座304上固定连接有折叠舵机305,折叠舵机305的输出端固定连接有舵臂306,舵臂306一端与折叠连杆303另一端转动连接;滑块302两侧分别安装有万向节307,大臂杆4012通过万向节307与滑块302铰接,折叠舵机305与控制系统6电性连接。
54.机翼折叠过程:
55.折叠舵机305转动,带动舵臂306旋转,舵臂306通过折叠连杆303拉动滑块302在直线导轨301上做周期性往复运动,通过滑块302拉动大臂杆4012,使得大臂杆4012与小臂杆4011之间的夹角变大,小臂杆4011拉动小臂支撑杆4013,通过小臂支撑杆4013和大臂杆4012拉动腕杆4021,使得腕杆4021绕大臂杆4012发生转动,通过腕杆4021带动第二仿生指4032向靠近小臂支撑杆4013的方向收回,同时通过第一连杆4034和第二连杆4035分别拉动第三仿生指4033和第一仿生指4031收回,同时从而拉动外部蒙皮7,实现外蒙皮7的折叠收回。
56.机翼展开过程:
57.折叠舵机305转动,带动舵臂306旋转,舵臂306通过折叠连杆303拉动滑块302在直线导轨301上做周期性往复运动,通过滑块302拉动大臂杆4012,使得大臂杆4012与小臂杆4011之间的夹角变小,小臂杆4011拉动小臂支撑杆4013,通过小臂支撑杆4013和大臂杆4012拉动腕杆4021,使得腕杆4021绕大臂杆4012发生转动,通过腕杆4021带动第二仿生指4032向远离小臂支撑杆4013的方向展开,同时通过第一连杆4034和第二连杆4035分别拉动第三仿生指4033和第一仿生指4031展开,同时从而拉动外部蒙皮7,实现外蒙皮7的展开。
58.进一步优化方案,翅膀扑动机构2包括固定连接在机身骨架1上的无刷电机201,无刷电机201的输出端固定连接有第一齿轮202,机身骨架1的两侧分别安装有齿轮组,两齿轮组传动配合,第一齿轮202与任一齿轮组传动配合,两齿轮组上分别安装有曲柄203,曲柄203转动连接有摇杆204一端,摇杆204另一端转动连接有连杆205中部,机身骨架1上安装有水平转轴,连杆205一端开设有长通孔,连杆205通过长通孔转动连接在水平转轴上,连杆205另一端安装有竖直转轴,大臂杆4012通过竖直转轴与连杆205转动连接,无刷电机201与控制系统6电性连接。
59.进一步优化方案,机身骨架1上转动连接有水平转轴,齿轮组包括第二齿轮206,两齿轮组的第二齿轮206分别固定连接在水平转轴的两端,第一齿轮202与任一第二齿轮206啮合,第二齿轮206远离机身骨架1的一侧同轴固接有第三齿轮207,机身骨架1上转动连接有第四齿轮208,第三齿轮207与第四齿轮208啮合,曲柄203同轴固接在第四齿轮208远离机
身骨架1的一侧。
60.机翼上下扑动过程:无刷电机201转动,带动第一齿轮202旋转,第一齿轮202依次带动第二齿轮206、第三齿轮207、第四齿轮208旋转,从而带动曲柄203旋转,曲柄203旋转带动与曲柄203转动连接的摇杆204上下扑动,从而带动连杆205绕水平转轴旋转,从而带动前肢主动变形机构4做上下扑动,无刷电机201带动摇杆204周期性运动,即可带动前肢主动变形机构4周期性上下扑动。
61.进一步优化方案,腿部主动变形机构5的数量为两个,两腿部主动变形机构5对称设置在机身骨架1尾部的两侧,腿部主动变形机构5包括第一舵机501,第一舵机501的输出轴竖向设置,第一舵机501上安装有第一舵机座502,第一舵机501通过第一舵机座502固定在机身骨架1上,第一舵机501的输出轴固定连接有第二舵机座503,第二舵机座503上固定连接有第二舵机504,第一舵机座502的输出轴和第二舵机504的输出轴相互正交,第二舵机504上转动连接有u型卡件505,u型卡件505上固定连接有腿部连杆506,腿部连杆506与蒙皮7胶接,第一舵机501和第二舵机504分别与控制系统6电性连接。
62.第一舵机501为实现腿部连杆506中间-侧边摆动提供动力,第二舵机504为实现腿部连杆506腹-背方向的摆动提供动力。飞行器每条后腿都有两个主动摆动自由度,且相互独立。初始状态下,腿部摆动平面与机身中轴对称面夹角设置为30
°
,较为接近蝙蝠腿部形态。考虑到两个腿部连杆506对蒙皮7的变形控制作用已足够,所以本发明不设置尾巴。
63.下扑阶段:是指机翼从最高点运动到最低点的过程。此阶段,机翼翼展先增大后减小,在中间位置时翼展达到最大。腿部连杆506在水平方向上,由中间向两侧运动;竖直方向上,由背部向腹部运动。这些动作是为了阻滞空气流通,增加下扑升力。
64.上扑阶段:是指机翼从最低点运动到最高点的过程。当下扑至最低点后,机翼迅速折叠收拢到机身两侧并向上运动。上扑至最高点后,机翼完全展开。腿部连杆506在水平方向上,由两侧向中间运动;竖直方向上,由腹部向背部运动。这些动作是为了加速空气流通,减少上升阻力。
65.进一步优化方案,控制系统6包括接收机601、机载控制器602和舵机扩展板603,接收机601、机载控制器602和舵机扩展板603均固定在机身骨架1上,舵机扩展板603与机载控制器602均采用spi通信方式。
66.折叠舵机305、无刷电机201、第一舵机501、第二舵机504均与机载控制机载控制器602电性连接,机载控制器602与接收机601电性连接。
67.飞手可使用航模遥控器向接收机601和机载控制器602发送调节命令。进一步的,通过闭环反馈控制,使翅膀折展、翅膀扑翼、腿部运动三个动作有序协调。
68.进一步优化方案,机身骨架1上安装有供电装置8,供电装置8包括锂电池801和辅助电源802,机身骨架1上固定有电池座803,锂电池801通过电池座803固定在机身骨架1上,供电装置8用于为飞行器供电。
69.综合实施过程:折叠舵机305转动,带动舵臂306旋转,舵臂306通过折叠连杆303拉动滑块302在直线导轨301上做周期性往复运动,通过滑块302拉动大臂杆4012,使得大臂杆4012与小臂杆4011之间的夹角变大,小臂杆4011拉动小臂支撑杆4013,通过小臂支撑杆4013和大臂杆4012拉动腕杆4021,使得腕杆4021绕大臂杆4012发生转动,通过腕杆4021带动第二仿生指4032向靠近小臂支撑杆4013的方向收回,同时通过第一连杆4034和第二连杆
4035分别拉动第三仿生指4033和第一仿生指4031收回,同时从而拉动外部蒙皮7,实现外蒙皮7的折叠收回,然后折叠舵机305持续转动,带动舵臂306旋转,舵臂306通过折叠连杆303拉动滑块302在直线导轨301上做周期性往复运动,通过滑块302拉动大臂杆4012,使得大臂杆4012与小臂杆4011之间的夹角变小,小臂杆4011拉动小臂支撑杆4013,通过小臂支撑杆4013和大臂杆4012拉动腕杆4021,使得腕杆4021绕大臂杆4012发生转动,通过腕杆4021带动第二仿生指4032向远离小臂支撑杆4013的方向展开,同时通过第一连杆4034和第二连杆4035分别拉动第三仿生指4033和第一仿生指4031展开,同时从而拉动外部蒙皮7,实现外蒙皮7的展开,循环进行,实现外蒙皮7的折叠与展开,同时无刷电机201转动,带动第一齿轮202旋转,第一齿轮202依次带动第二齿轮206、第三齿轮207、第四齿轮208旋转,从而带动曲柄203旋转,曲柄203旋转带动与曲柄203转动连接的摇杆204上下扑动,从而带动连杆205绕水平转轴旋转,从而带动前肢主动变形机构4做上下扑动,无刷电机201带动摇杆204周期性运动,带动前肢主动变形机构4周期性上下扑动,通过第一舵机501和第二舵机504配合控制腿部连杆506运动,控制飞行器的俯仰和转弯运动,使得装置可以模拟蝙蝠飞行运动。
70.实施例2:机翼平面展弦比为5.5~8,机翼的展收比为2~1.5。
71.实施例3:摇杆204上安装有磁编码器用来实时监测并反馈扑翼的角度值,将此角度信号按照一定关系映射出五路pwm调节信号,驱动折叠舵机305、两个第一舵机501和两个第二舵机504转动,通过闭环反馈控制,使翅膀折展运动和腿部运动都始终跟随翅膀的扑翼运动。
72.在本发明的描述中,需要理解的是,术语“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
73.以上所述的实施例仅是对本发明的优选方式进行描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方案做出的各种变形和改进,均应落入本发明权利要求书确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1