一种柔性太阳翼二维同步翻转展开装置的制作方法
1.本发明属于航天技术领域,尤其涉及一种柔性太阳翼二维同步翻转展开装置。
背景技术:
2.目前,柔性太阳翼凭借其收拢尺寸较小,空间利用率较高,成为航天器能源功能重要组成部分。柔性翼展开机构用具备展开功能和保持整翼刚度功能,在国际上,展开结构是直线型展开,在展开路径上需满足没有运动干涉要求,会存在无法合理利用星体内空间的情况,导致占用空间较大,且当两翼间距较小时,展开过程中两翼容易发生碰撞。
技术实现要素:
3.本发明要解决的技术问题是提供一种柔性太阳翼二维同步翻转展开装置,以解决现有直线型展开方案占用空间较大的问题。
4.为解决上述问题,本发明的技术方案为:
5.本发明的一种柔性太阳翼二维同步翻转展开装置,包括:
6.驱动件,所述驱动件的固定端安装于星体表面;
7.首端支撑座,所述首端支撑座通过翻转结构连接至所述驱动件的输出端,用于由所述驱动件带动所述首端支撑座相对于外部平台翻转;
8.首端同步机构,设于所述首端支撑座上,所述首端同步机构的两个输出端的输出运动方向相反且运动速率相同;
9.传动机构,所述传动机构的输入端连接于所述驱动件的输出端,所述传动机构的输出端连接至所述首端同步结构的输入端;
10.展开机构,所述展开机构的第一输入端和第二输入端分别与所述所述首端同步机构的两个输出端相连;
11.太阳翼阵面,所述太阳翼阵面的两端分别连接于所述展开机构的两端。
12.本发明的柔性太阳翼二维同步翻转展开装置,所述首端同步机构包括第一直齿轮、第二直齿轮、第一同步轮、第二同步轮和第一同步带;
13.所述第一直齿轮、第二直齿轮、第一同步轮、第二同步轮均转动连接于所述首端支撑座;
14.所述第一同步轮与所述第一直齿轮同轴转动,且所述第一同步轮和/或所述第一直齿轮的转轴与所述传动机构的输出端相连接;
15.所述第二直齿轮啮合于所述第一直齿轮,且所述第二直齿轮的转轴与所述第一输入端相连;
16.所述第二同步轮的转轴与所述第二输入端相连,且所述第一同步轮与所述第二同步轮通过所述第一同步带传动连接。
17.本发明的柔性太阳翼二维同步翻转展开装置,还包括尾端支撑座和尾端同步机构;所述尾端同步机构包括第三直齿轮、第四直齿轮、第三同步轮、第四同步轮和第二同步
带;
18.所述第三直齿轮、第四直齿轮、第三同步轮、第四同步轮均转动连接于所述尾端支撑座;
19.所述第三同步轮与所述第三直齿轮同轴转动;
20.所述第三直齿轮啮合于所述第四直齿轮,且所述第四直齿轮的转轴与所述展开机构第二侧的第一同步端;
21.所述第二同步轮的转轴与所述展开机构第二侧的第二同步端相连,且所述第三同步轮与所述第四同步轮通过所述第二同步带传动连接。
22.本发明的柔性太阳翼二维同步翻转展开装置,还包括第一均载梁和第二均载梁,所述第一均载梁均布有第一恒力弹簧,所述第二均载梁上均布有第二恒力弹簧;
23.所述第一均载梁固定连接于所述首端支撑座,且所述第一恒力弹簧均连接至所述太阳翼阵面的第一端;
24.所述第二均载梁固定连接于所述尾端支撑座,且所述第二恒力弹簧均连接至所述太阳翼阵面的第二端。
25.本发明的柔性太阳翼二维同步翻转展开装置,所述展开机构包括两根首端短杆、第一中间长杆连接段、第二中间长杆连接段和两根尾端短杆;
26.所述第一中间长杆连接段和所述第二中间长杆连接段均包括若干依次首尾铰接的中间长杆;且第一中间长杆连接段与所述第二中间长杆连接段的所述中间长杆一一对应,且对应的所述中间长杆之间转动连接;
27.所述第一长杆连接段首端和所述第二长杆连接段首端的所述中间长杆分别与两根所述首端短杆铰接,两根所述首端短杆分别与所述第二直齿轮的转轴和所述第二同步轮的转轴转动连接;
28.所述第一长杆连接段尾端和所述第二长杆连接段尾端的所述中间长杆分别与两根所述尾端短杆铰接,两根所述尾端短杆分别与所述第四直齿轮的转轴和所述第四同步轮的转轴转动连接。
29.本发明的柔性太阳翼二维同步翻转展开装置,相邻的所述中间长杆之间通过合页关节铰接;
30.所述首端短杆与对应的所述中间长杆之间通过合页关节铰接;
31.所述尾端短杆与对应的所述中间长杆之间通过合页关节铰接。
32.本发明的柔性太阳翼二维同步翻转展开装置,所述翻转结构包括第一翻转连接件和第二翻转连接件;
33.所述第一翻转连接件的第一端固定连接于所述驱动件的输出端,所述第一翻转连接件的第二端固定连接于所述第二翻转连接件的第一端,所述第二翻转连接件的第二端固定连接于所述首端支撑座。
34.本发明的柔性太阳翼二维同步翻转展开装置,所述传动机构包括第一锥齿轮和第二锥齿轮;
35.所述第一锥齿轮固定连接于所述驱动件的输出端;
36.所述第二锥齿轮固定连接于所述首端同步机构的输入端,且所述所述第二锥齿轮啮合于所述第一锥齿轮。
37.本发明的柔性太阳翼二维同步翻转展开装置,所述首端同步机构、所述传动机构的传动比均为1。
38.本发明的柔性太阳翼二维同步翻转展开装置,所述驱动件为驱动电机。
39.本发明由于采用以上技术方案,使其与现有技术相比具有以下的优点和积极效果:
40.本发明一实施例通过设置驱动件、首端支撑座、首端同步机构、传动机构、展开机构以及太阳翼阵面;首端同步机构、传动机构、展开机构以及太阳翼阵面均设置在首端支撑座上,驱动件作为传动机构的动力输入,由传动机构带动首端同步机构的两个输出端驱动展开机构对太阳翼阵面进行展开;并进一步在驱动件的输出端与首端支撑座之间设置翻转结构,使得首端支撑座以及其上的机构可随着驱动件的输出端翻转,并且在翻转的同时实现太阳翼阵面的展开;本实施例通过开展时同步进行翻转,可防止在展开路径上与其他物品发生干涉,所需占用空间少,减少展开步骤,实现两维展开过程中无需箱板进行压紧,展开过程可靠,展开收纳比高,解决了现有直线型展开方案占用空间较大的问题。
附图说明
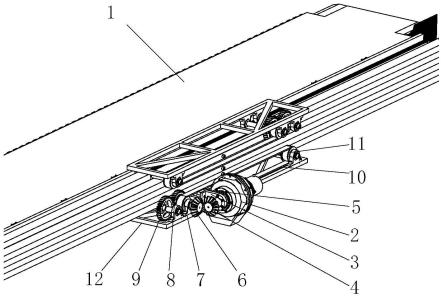
41.图1为本发明的柔性太阳翼二维同步翻转展开装置的收拢状态示意图;
42.图2为本发明的柔性太阳翼二维同步翻转展开装置的展开20
°
状态示意图;
43.图3为本发明的柔性太阳翼二维同步翻转展开装置的展开40
°
状态示意图;
44.图4为本发明的柔性太阳翼二维同步翻转展开装置的完全展开状态示意图。
45.附图标记说明:1:太阳翼阵面;2:驱动件;3:第一翻转连接件;4:第一锥齿轮;5:第二翻转连接件;6:第二锥齿轮;7:第一同步轮;8:第一直齿轮;9:第二直齿轮;10:第一同步带;11:第二同步轮;12:首端支撑座;13:首端短杆;14:中间长杆;15:合页关节;16:均载梁。
具体实施方式
46.以下结合附图和具体实施例对本发明提出的一种柔性太阳翼二维同步翻转展开装置作进一步详细说明。根据下面说明和权利要求书,本发明的优点和特征将更清楚。
47.参看图1至图4,在一个实施例中,一种柔性太阳翼二维同步翻转展开装置,包括驱动件2、首端支撑座12、首端同步机构、传动机构、展开机构和太阳翼阵面1。
48.驱动件2的固定端安装于星体表面。
49.首端支撑座12通过翻转结构连接至驱动件2的输出端,用于由驱动件2带动首端支撑座12相对于外部平台翻转。首端同步机构设于首端支撑座12上,首端同步机构的两个输出端的输出运动方向相反且运动速率相同。
50.传动机构的输入端连接于驱动件2的输出端,传动机构的输出端连接至首端同步结构的输入端。展开机构的第一输入端和第二输入端分别与首端同步机构的两个输出端相连。
51.太阳翼阵面1的两端分别连接于展开机构的两端。
52.本实施例通过设置驱动件2、首端支撑座12、首端同步机构、传动机构、展开机构以及太阳翼阵面1。首端同步机构、传动机构、展开机构以及太阳翼阵面1均设置在首端支撑座12上,驱动件2作为传动机构的动力输入,由传动机构带动首端同步机构的两个输出端驱动
展开机构对太阳翼阵面1进行展开。并进一步在驱动件2的输出端与首端支撑座12之间设置翻转结构,使得首端支撑座12以及其上的机构可随着驱动件2的输出端翻转,并且在翻转的同时实现太阳翼阵面1的展开。本实施例通过翻转结构使得太阳翼阵面1在展开时,装置整体同步进行翻转,可防止在展开路径上与其他物品发生干涉,所需占用空间少,减少展开步骤,实现两维展开过程中无需箱板进行压紧,展开过程可靠,展开收纳比高,解决了现有直线型展开方案占用空间较大的问题。
53.下面对本实施例的柔性太阳翼二维同步翻转展开装置的具体结构进行进一步说明:
54.在本实施例中,上述的首端同步机构具体可包括第一直齿轮8、第二直齿轮9、第一同步轮7、第二同步轮11和第一同步带10。
55.第一直齿轮8、第二直齿轮9、第一同步轮7、第二同步轮11均通过转轴转动连接于首端支撑座12,转轴的轴线方向均为平行,第一直齿轮8、第二直齿轮9、第一同步轮7位于首端支撑座12的第一侧,第二同步轮11则是位于首端支撑座12的第二侧。
56.其中,第一同步轮7与第一直齿轮8设置为同轴转动,即两者套设固定在同一转轴(下称为第一同步转轴)上实现同步转动,且该第一同步转轴的设置为与上述传动机构的输出端相连接,从而由传动机构的输出端带动第一直齿轮8和第一同步轮7进行旋转。
57.第二直齿轮9啮合于第一直齿轮8,即可由转动的第一直齿轮8带动旋转,并且第二直齿轮9是反向旋转;并且,第二直齿轮9的转轴与上述的第一输入端相连,从而带动展开机构的第一输入端旋转。
58.同样地,第一同步轮7与第二同步轮11通过第一同步带10传动连接,即第一同步轮7与第二同步轮11同步转动;第二同步轮11的转轴与第二输入端相连,从而带动展开机构的第二输入端旋转。由此通过第二直齿轮9与第二同步轮11之间的反向旋转,实现第一输入端与第二输入端的反向旋转。
59.进一步地,本实施例的柔性太阳翼二维同步翻转展开装置还可包括尾端支撑座和尾端同步机构(结构与首端支撑座12以及首端同步机构相类似)。
60.具体地,尾端同步机构包括第三直齿轮、第四直齿轮、第三同步轮、第四同步轮和第二同步带。
61.同样,第三直齿轮、第四直齿轮、第三同步轮、第四同步轮均通过转轴转动连接于尾端支撑座。转轴的轴线方向均为平行,第三直齿轮、第四直齿轮、第三同步轮位于尾端支撑座的第一侧,第四同步轮则是位于尾端支撑座的第二侧。
62.第三同步轮与第三直齿轮同轴转动,即两者套设固定在同一转轴(下称为第二同步转轴)上实现同步转动,但此处无需动力输入。
63.第三直齿轮啮合于第四直齿轮,第四直齿轮是反向旋转;并且,第四直齿轮的转轴与上述的第一同步端相连,从而带动展开机构的第一同步端旋转。
64.第二同步轮11的转轴与展开机构第二侧的第二同步端相连,且第三同步轮与第四同步轮通过第二同步带传动连接,即第三同步轮与第四同步轮同步转动;第四同步轮的转轴与第二同步端相连,从而带动展开机构的第二同步端旋转。由此通过第四直齿轮与第四同步轮之间的反向旋转,实现第一同步端与第二同步端的反向旋转。
65.在本实施例中,柔性太阳翼二维同步翻转展开装置还可包括第一均载梁16和第二
均载梁16,第一均载梁16均布有第一恒力弹簧,第二均载梁16上均布有第二恒力弹簧。
66.第一均载梁16固定连接于首端支撑座12,且第一恒力弹簧均连接至太阳翼阵面1的第一端。第二均载梁16固定连接于尾端支撑座,且第二恒力弹簧均连接至太阳翼阵面1的第二端。从而由两侧的恒力弹簧对太阳翼阵面1保持张紧力。
67.在本实施例中,上述的展开机构具体可包括两根首端短杆13、第一中间长杆连接段、第二中间长杆连接段和两根尾端短杆。
68.第一中间长杆连接段和第二中间长杆连接段均包括若干依次首尾铰接的中间长杆14;且第一中间长杆连接段与第二中间长杆连接段的中间长杆14一一对应,且对应的中间长杆14之间转动连接(即两个长杆连接段对应的第一根长杆之间的中点转动连接,第二根长杆之间的中点转动连接,依次类推)。
69.第一长杆连接段首端和第二长杆连接段首端的中间长杆14分别与两根首端短杆13铰接,两根首端短杆13分别与第二直齿轮9的转轴和第二同步轮11的转轴转动连接。第二直齿轮9和第二同步轮11转动即可带动两根首端短杆13进行摆动。
70.第一长杆连接段尾端和第二长杆连接段尾端的中间长杆14分别与两根尾端短杆铰接,两根尾端短杆分别与第四直齿轮的转轴和第四同步轮的转轴转动连接。
71.具体地,相邻的中间长杆14之间通过合页关节15铰接。首端短杆13与对应的中间长杆14之间通过合页关节15铰接。尾端短杆与对应的中间长杆14之间通过合页关节15铰接。即上述的铰接位置均通过合页关节15进行连接。
72.在本实施例中,上述的翻转结构具体可包括第一翻转连接件3和第二翻转连接件5。第一翻转连接件3的第一端固定连接于驱动件2的输出端,第一翻转连接件3的第二端固定连接于第二翻转连接件5的第一端,第二翻转连接件5的第二端固定连接于首端支撑座12。第一翻转连接件3和第二翻转连接件5各端的连接方式均可采用螺栓进行连接。
73.在本实施例中,上述的传动机构具体可为包括第一锥齿轮4和第二锥齿轮6。第一锥齿轮4固定连接于驱动件2的输出端。第二锥齿轮6固定连接于首端同步机构的输入端,且第二锥齿轮6啮合于第一锥齿轮4。锥齿轮的设置使得可匹配装置整体相对于驱动件2的固定端翻转的需求。
74.在本实施例中,为了保证第二直齿轮9与第二同步轮11的同步转动,首端同步机构、传动机构的传动比均为1。即上述的各个锥齿轮,直齿轮,同步轮之间的传动比均为1,使得两根首端短杆13的转动角度保持一致。并且,在展开过程中,首端短杆13转动角度与整翼翻转角度时刻保持一致。
75.在本实施例中,上述驱动件2具体可为驱动电机。
76.本实施例的柔性太阳翼二维同步翻转展开装置,驱动太阳翼阵面1展开时同步进行翻转,防止在展开路径上与其他物品发生干涉,减少展开步骤,实现两维展开过程中无需箱板进行压紧。展开过程可靠,展开收纳比高。
77.上面结合附图对本发明的实施方式作了详细说明,但是本发明并不限于上述实施方式。即使对本发明作出各种变化,倘若这些变化属于本发明权利要求及其等同技术的范围之内,则仍落入在本发明的保护范围之中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1