无动力飞行器的制作方法
1.本发明涉及军事技术领域,也可用于民用飞行技术领域,具体地,涉及一种无动力飞行器。
背景技术:
2.强大的军事能力是国家安全的重要保障。在一些特别军事行动中,往往需要潜入敌方内部。过往的战争中,经常会用空投降落伞的方式使己方士兵潜入敌方领地,但这仅能实现兵力自上而下的高空垂直投放,需要用飞机装载士兵飞入敌方领空,成本较高且目标过大容易被发现;另一方面,士兵跳伞后无法及时、灵活地调整选择降落地点,且存在高空摔死的风险;再者,士兵完成军事行动后有去难回,结局往往九死一生。显然,这种方式已越来越难以适应现代战争。
3.就民用飞行技术领域而言:古往今来,尽管“像鸟儿一样飞翔”一直是人类追求的梦想,但目前还缺乏一种简单可行、低成本的工具来帮助人类实现这一梦想。
技术实现要素:
4.本发明目的在于提供一种无动力飞行器,在军事领域克服上述不足,基于本发明生成新的行动方案,实现出奇制胜的战术效果;在民用飞行领域,可以帮助人类实现“御风而行”的梦想。
5.一种无动力飞行器,包含气球模块、固定连接模块、仿生翅膀、飞行探测模块、中央处理模块以及操作模块。
6.气球模块包含气球囊与升降控制装置。
7.气球囊用于储存气体,所述气体的密度小于1kg/m3。
8.优选地,所述气体为氢气或氦气。
9.升降控制装置中包含气体生成装置与排气阀。其中,气体生成装置用于生成气体并向气球囊内输送气体,使气球囊产生向上的浮力;排气阀用于排出气球囊内的气体,以减小气球囊的浮力;
10.升降控制装置用于控制气体生成装置与排气阀,进而控制气球囊的升降。
11.固定连接模块用于将气球模块与人体相连接,还连接仿生翅膀,并用于搭载中央处理模块及操作模块等模块。
12.固定连接模块上设有人体固定装置,可用于绑缚或装载人体。人体固定装置与仿生翅膀部分连接,飞行员可以使用固定连接模块在手臂或腿脚的作用下控制仿生翅膀,模拟鸟类煽动翅膀,以控制横向飘移方向。
13.固定连接模块上有俯仰调节装置,通过设置伸缩长度,调节人体俯仰角度。
14.飞行探测模块中包含定位装置、高度测量装置、速度测量装置、风速测量装置,用于实时测量飞行经纬度、高度、移动速度、风速等信息。
15.中央处理模块用于接收飞行探测模块所采集到的信息以及飞行员通过操作模块
所发送的指令信息,经过分析处理后,可以向升降控制装置发送升降指令,可以指令固定连接模块辅助调整仿生翅膀的伸展姿态,也可指令俯仰调节装置伸缩以调节人体的俯仰角度,并将飞行员所需的相关信息反馈给飞行员。
16.操作模块用于飞行员向中央处理模块发送指令。
17.本发明的有益效果是:
18.(1)通过增减气球囊内部气体的容量来调整浮力,使飞行员实现在空中的飘浮升降;通过手臂或腿脚调整仿生翅膀的伸展姿态控制飞行方向;在气象条件适宜时可直接利用风能所提供的动力实现“御风而行”的梦想。
19.(2)本发明在起飞和降落过程中可以不产生噪音,便于在夜晚或在云雾遮掩情况下悄悄潜入敌方地盘,隐蔽性很强;
20.(3)本发明可以实现超低空飞行,一方面,传统雷达难以发现,便于发动突袭;另一方面,在气象条件允许的情况下可以实现多点分散式横向远距离兵力投放;再者,在超低空飞行,即使摔下来,存活的概率也比较高;
21.(4)本发明结构简单,制造成本低,可以大批量生产应用,进而实现大规模的兵力投放。
22.(5)相较于降落伞而言,本发明不但有助于士兵利用仿生翅膀灵活地选择合适的降落地点,而且由于本发明起飞时不受地域限制,能重复使用,士兵在结束行动后还可以再次用本发明悄悄离开敌方领地,从而更好地避免在离开时成为俘虏,提升执行特别行动时的生还概率。
23.(6)由于以往的战争中未使用过本发明作为运载工具,普遍缺乏应对措施,故在战争中初次秘密使用本发明可能达到出其不意、出奇制胜的战术效果。另一方面,士兵使用该发明飞行时可以随风飘忽不定,在保持适当距离或有云雾遮掩的情况下,即便目标暴露,敌方也很难使用常规武器实施打击,或者会因防卫技术成本过高而疲于应对。
24.可以理解的是,本发明无动力推进装置,仅在无风或顺风的情况下使用时比较便捷,在逆风的情况下如果依靠人力逆风飞行将非常不便。同时需要指出的是,本发明并非不能使用动力推进装置,若在本发明的基础上加装动力推进装置则能实现更强劲有力的飞行效果,但同时也必将产生更多的负载,增加成本。
附图说明
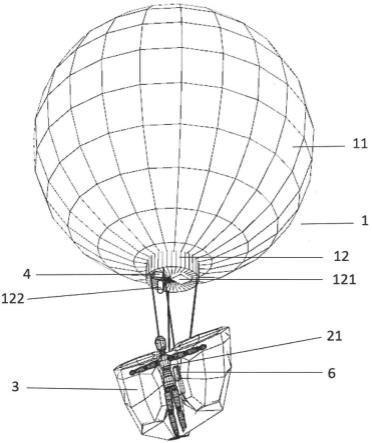
25.图1为本发明结构示意图;
26.图2为本发明的局部示图。
27.图中:1、气球模块;2、固定连接模块;3、仿生翅膀;4、飞行探测模块;5、中央处理模块;6、操作模块;11、气球囊;12、升降控制装置;121、气体生成装置;122、排气阀;21、人体固定装置;22、俯仰调节装置。
具体实施方式
28.为了使本发明的目的、技术方案和优点更容易被清楚地理解,下面结合本发明的附图,对本发明的技术方案进行清楚、完整地描述。应当理解,此处所描述的内容仅用以解释本发明,并不用于限定本发明。
29.如图1、图2所示,一种无动力飞行器,包含气球模块1、固定连接模块2、仿生翅膀3、飞行探测模块4、中央处理模块5以及操作模块6。
30.所述气球模块1包含气球囊11与升降控制装置12。
31.所述气球囊11用于储存气体,所述气体的密度小于1kg/m3。
32.优选地,所述气体为氢气或氦气。
33.所述升降控制装置12包含气体生成装置121与排气阀122。其中,所述气体生成装置121用于生成气体并向所述气球囊11内输送气体,使所述气球囊11产生向上的浮力;所述排气阀122用于排出所述气球囊11内的气体,以减小所述气球囊11的浮力;
34.所述升降控制装置12用于控制所述气体生成装置121与所述排气阀122,进而控制所述气球囊11的升降。
35.所述固定连接模块2用于将所述气球模块1与人体相连接,还连接所述仿生翅膀3,并用于搭载所述中央处理模块5及所述操作模块6等其它模块。
36.所述固定连接模块2上有人体固定装置21,可用于绑缚或装载人体。所述人体固定装置21与所述仿生翅膀3部分连接,飞行员可以运用所述固定连接模块2在手臂或腿脚的作用下控制所述仿生翅膀3,模拟鸟类煽动翅膀,以控制飘移姿态,尤其是控制横向飘移方向。
37.所述固定连接模块2上有俯仰调节装置22,通过设置伸缩长度,调节人体俯仰角度。
38.所述飞行探测模块4中包含定位装置、高度测量装置、定向装置、风速测量装置、风向探测装置,用于实时测量飞行经纬度、高度、速度、方向、风速风向等信息。
39.所述中央处理模块5用于接收所述飞行探测模块4所采集到的信息以及飞行员通过所述操作模块6所发送的指令信息,经过分析处理后,可以向所述升降控制装置12发送升降指令,可以通过所述固定连接模块2辅助调整所述仿生翅膀3的姿态,也可指令所述俯仰调节装置22伸缩以调节人体的俯仰角度,并将飞行员所需的相关信息反馈给飞行员。
40.所述操作模块6用于飞行员向所述中央处理模块5发送指令。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1