飞行体的制作方法
1.本发明涉及一种飞行体
背景技术:
2.近年来,正在推进使用无人机(drone)、无人飞行器(uav:unmanned aerial vehicle)等飞行体(以下总称为“飞行体”)的递送服务的实用化。一般被称为多旋翼机的、具备多个螺旋桨的飞行体(以下总称为多旋翼机)不像一般的固定翼机那样需要起飞降落用的跑道,因此能够在比较窄的土地上运用,适用于提供递送等运送服务。
3.在飞行体的运输中,在从飞行体分离货物时,已知如下方法:飞行体降落在停靠口等处,现场解除货物的保持而使其到货,或人进行货物的取下。
4.但是,已知伴随飞行体的垂直下降的降落动作与巡航动作等相比,飞行体容易变得不稳定。另外,人为了进行货物的取下,必须接近、接触机体。鉴于这样的状况,专利文献1公开了一种飞行体的货物配送系统,其从飞行体垂下货物使其下降,由此,即使飞行体不进行降落,也能够分离货物(例如,参照专利文献1)。
5.现有技术文献
6.专利文献
7.专利文献1:美国专利申请公开第2020/0207474号
8.专利文献2:日本特开2019-001309号公报
技术实现要素:
9.发明所要解决的课题
10.专利文献1公开了一种具备以下机构的飞行体的货物配送系统:用线缆连接飞行体与货物,通过朝向地面放出线缆来卸下货物,当货物到达地面时,自动从线缆释放货物。
11.在从上空的飞行体垂下货物进行卸货的情况下,存在难以提高货物的位置精度的情况。例如,存在由环境风、飞行体的移动等引起被线缆垂下的货物的摇晃、位置偏移的情况。另外,在使用gnss进行飞行体的位置控制的情况下,位置精度有时会根据卫星的补充状况而变化。
12.在货物的分离目的地为较宽的停靠口、地面的情况下,货物的位置偏移不容易成为问题。但是,在使货物到货于狭窄的土地、紧凑的停靠口的情况下,要求提高货物的位置精度。
13.另外,出于限制飞行体的移动量的目的,如专利文献2那样公开了使用系留部件和卷取装置的区域限制单元。
14.但是,在递送、检修等用途中,飞行体需要大范围的飞行,很难在系留于一点的状态下进行业务。因此,本发明的一个目的在于提供一种限位系统,其能够在起飞降落地点等规定地点进行临时的区域限制,而不会在飞行时一直系留。
15.用于解决课题的手段
16.根据本发明,能够提供一种飞行体,其经由悬挂部件来悬挂搭载物,所述悬挂部件由第一部分和与所述第一部分结构不同且成为抓持对象的第二部分构成。
17.此外,关于本技术所公开的课题、其解决方法,通过发明的实施方式栏和附图来加以明确。
18.发明效果
19.根据本发明,能够提供一种飞行体,其具备悬挂搭载物的悬挂部件,悬挂部件由使该悬挂部件整体轻量化的第一部分和容易从外部进行抓持的第二部分构成。
附图说明
20.图1是从侧面观察本发明的限位装置的示意图。
21.图2是图1的限位装置的使用时的图。
22.图3是从上面观察图1的限位装置的示意图。
23.图4是从上面观察图2的限位装置的示意图。
24.图5是示出限位装置的例子的其他俯视图。
25.图6是示出限位装置的例子的其他俯视图。
26.图7是示出限位装置的例子的其他俯视图。
27.图8是示出图7的限位装置的动作例的图。
28.图9是能够与本发明组合使用的飞行体的侧视图。
29.图10是图12的飞行体的俯视图。
30.图11是图1的飞行体的功能框图。
31.图12是示出与飞行体连接的悬挂部件的结构例的侧视图。
32.图13是示出与飞行体连接的悬挂部件的结构例的侧视图。
33.图14是示出悬挂部件的剖视图的例子的图。
34.图15是示出悬挂部件的剖视图的例子的图。
35.图16是示出悬挂部件的剖视图的例子的图。
36.图17是示出悬挂部件的结构例的侧视图。
37.图18是示出悬挂部件的结构例的侧视图。
38.图19是示出与飞行体连接的悬挂部件的结构例的侧视图。
39.图20是图19的悬挂部件被放出时的图。
40.图21是示出本发明的限位装置的结构例的侧视图。
41.图22是图21的限位装置的主视图。
42.图23是图22的限位装置的使用时的图。
43.图24是示出具备悬挂部移动单元的搭载部的结构例的侧视图。
44.图25是示出具备悬挂部移动单元的搭载部的结构例的侧视图。
45.图26是示出本发明的限位装置的结构例的侧视图。
46.图27是图26的限位装置的使用时的图。
47.图28是人抓持本发明的悬挂部件时的图。
48.图29是示出在多个部位设置第二部分的悬挂部件的结构例的图。
具体实施方式
49.列举本发明的实施方式的内容进行说明。本发明的实施方式的飞行体具备如下结构。
50.[项目1]
[0051]
一种飞行体,其经由悬挂部件来悬挂搭载物,其特征在于:
[0052]
所述悬挂部件由第一部分和与所述第一部分结构不同且成为抓持对象的第二部分构成。
[0053]
[项目2]
[0054]
根据项目1所述的飞行体,其特征在于:
[0055]
所述第一部分和所述第二部分是不同的绳状部件,且彼此连接。
[0056]
[项目3]
[0057]
根据项目1或2所述的飞行体,其特征在于:
[0058]
所述第二部分使用比所述第一部分粗的部件。
[0059]
[项目4]
[0060]
根据项目1至3中任一项所述的飞行体,其特征在于:
[0061]
所述第二部分被覆盖部件覆盖。
[0062]
[项目5]
[0063]
根据项目1至4中任一项所述的飞行体,其特征在于:
[0064]
所述第二部分构成为摩擦系数比所述第一部分高。
[0065]
[项目6]
[0066]
根据项目1所述的飞行体,其特征在于:
[0067]
所述第一部分和所述第二部分具备共同的绳状部件,
[0068]
所述第二部分设置有覆盖所述共同的绳状部件的部件。
[0069]
[项目7]
[0070]
根据项目6所述的飞行体,其特征在于:
[0071]
覆盖所述共同的绳状部件的部件是摩擦系数高的覆盖部件。
[0072]
[项目8]
[0073]
根据项目6或7所述的飞行体,其特征在于:
[0074]
覆盖所述共同的绳状部件的部件是在表面具有凹凸形状的部件。
[0075]
[项目9]
[0076]
根据项目1至8中任一项所述的飞行体,其特征在于:
[0077]
所述第二部分的截面形状与所述第一部分的截面形状不同。
[0078]
[项目10]
[0079]
根据项目9所述的飞行体,其特征在于:
[0080]
所述第二部分的截面形状为多边形状。
[0081]
[项目11]
[0082]
根据项目1至10中任一项所述的飞行体,其特征在于:
[0083]
所述第二部分设置在所述搭载物的附近。
[0084]
[项目12]
[0085]
根据项目1至11中任一项所述的飞行体,其特征在于:
[0086]
所述悬挂部件与搭载所述搭载物的搭载部连接。
[0087]
[项目13]
[0088]
根据项目12所述的飞行体,其特征在于:
[0089]
所述搭载部具备旋翼。
[0090]
[项目14]
[0091]
根据项目12或13中任一项所述的飞行体,其特征在于:
[0092]
所述悬挂部件由以下部分构成:第一悬挂部件,其设置在所述飞行体与所述搭载部之间;以及第二悬挂部件,其设置在所述搭载部与所述搭载物之间。
[0093]
[项目15]
[0094]
根据项目14所述的飞行体,其特征在于:
[0095]
所述第一悬挂部件和所述第二悬挂部件均具有所述第二部分。
[0096]
[项目16]
[0097]
根据项目14所述的飞行体,其特征在于:
[0098]
所述第一悬挂部件具有所述第二部分,
[0099]
所述第二悬挂部件不具有所述第二部分。
[0100]
[项目17]
[0101]
根据项目14所述的飞行体,其特征在于:
[0102]
所述第一悬挂部件不具有所述第二部分,
[0103]
所述第二悬挂部件具有所述第二部分。
[0104]
《本发明的实施方式的详细内容》
[0105]
以下,参照附图对本发明的实施方式的飞行体进行说明。
[0106]
《第一实施方式的详细内容》
[0107]
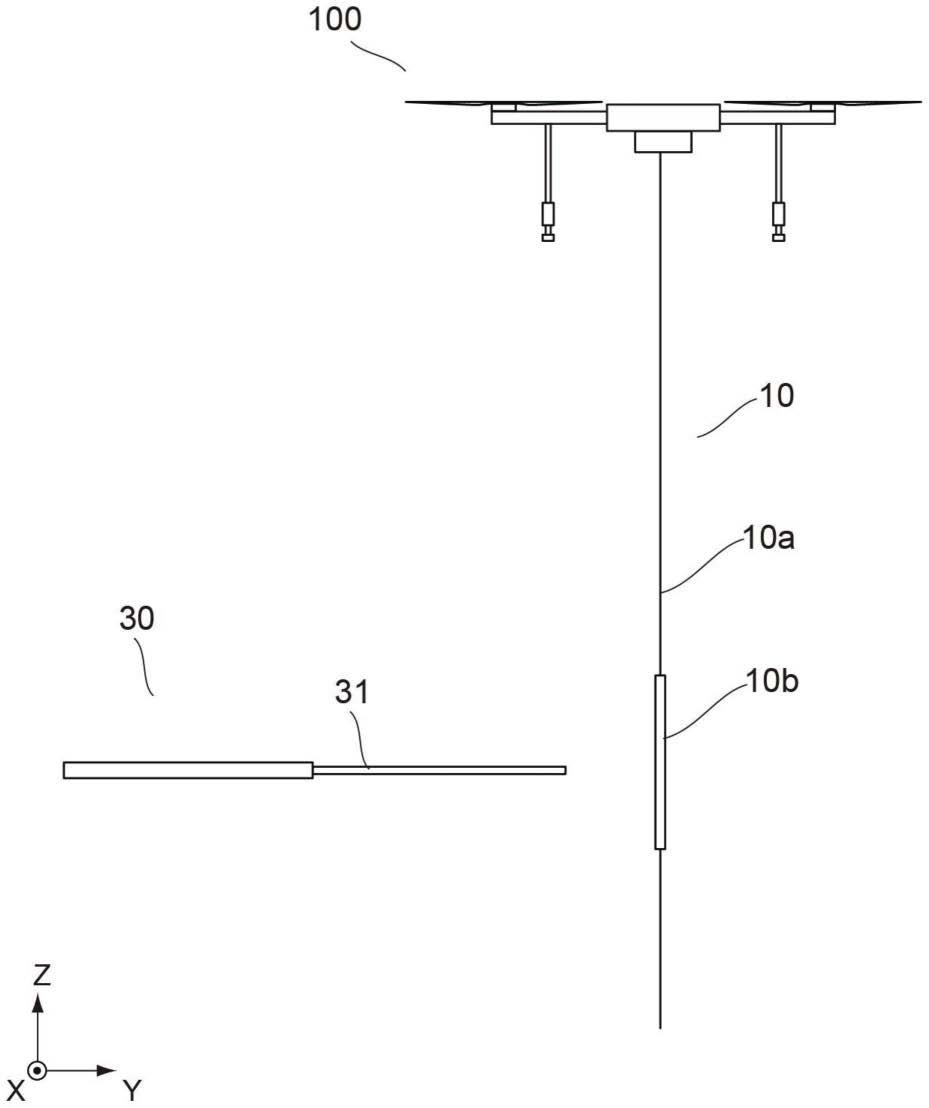
如图1和图2所例示的那样,飞行体100与限位装置30、人能够抓持的悬挂部件10连接,通过限制悬挂部件10的移动,飞行体的移动受到限制。与飞行体100连接的悬挂部件10的连接位置优选为飞行体不会因抓持而变得不稳定的场所(例如,从飞行体的上方或下方观察,悬挂部件通过机体的中央部分的位置,特别是机体的底面中央部分)。
[0108]
通过由限位装置30限制飞行体100的可移动量、方向,即使存在风等环境的影响、飞行体100的控制障碍的影响,飞行体100、搭载物11也会被限制移动,因此各部分的位置偏移减少,例如在搭载物11为待投递的货物等的情况下,即使飞行体不降落,也容易向紧凑的停靠口等分离货物。另外,在飞行体进行降落的情况下,也会在可移动范围被限制的状态下进行下降、降落动作,因此,即使在飞行体不稳定的情况下,也能够期待确保周围的安全。
[0109]
飞行体100从起飞地点进行起飞,飞行到目的地。例如,在飞行体100进行配送的情况下,到达目的地的飞行体100通过在停靠口等处降落或分离货物来完成配送。分离了货物的飞行体100朝向其他目的地进行移动。
[0110]
如图9和图10所示,本发明的实施方式的飞行体100优选为了进行飞行而具备至少包括主体部、由螺旋桨110和马达111构成的多个旋翼部、以及支承旋翼部的马达支架、机架120等要素的飞行部,并且搭载有用于使它们动作的能量(例如二次电池、燃料电池、化石燃料等)。
[0111]
另外,为了便于说明本发明的构造,图示的飞行体100被简化描绘,例如,控制部等的详细结构未图示。
[0112]
飞行体100以图中箭头d的方向(-y方向)为前进方向(详见后述)。
[0113]
另外,在以下说明中,有时按照以下定义区分使用术语。前后方向:+y方向和-y方向、上下方向(或铅垂方向):+z方向和-z方向、左右方向(或水平方向):+x方向和-x方向、行进方向(前方):-y方向、后退方向(后方):+y方向、上升方向(上方):+z方向、下降方向(下方):-z方向。
[0114]
螺旋桨110接受来自马达111的输出而旋转。通过螺旋桨110旋转,产生用于使飞行体100从出发地起飞、移动、并在目的地降落的推进力。此外,螺旋桨110能够向右旋转、停止和向左旋转。
[0115]
本发明的飞行体所具备的螺旋桨110具有一个以上桨叶。桨叶(旋转体)的数量可以是任意的(例如1、2、3、4或更多的桨叶)。另外,桨叶的形状可以是平坦形状、弯曲形状、扭曲形状、锥形形状、或者它们的组合等任意形状。此外,桨叶的形状能够变化(例如伸缩、折叠、弯折等)。桨叶可以是对称的(具有相同的上部和下部表面),也可以是非对称的(具有不同形状的上部和下部表面)。桨叶能够形成为翼片、机翼或适于使桨叶在空中移动时生成气动力(例如升力、推力)的几何形状。桨叶的几何形状可以适当地选择,以优化桨叶的气动特性,如增加升力和推力、减少阻力等。
[0116]
另外,本发明的飞行体所具备的螺旋桨可以考虑固定桨距、可变桨距、以及固定桨距和可变桨距的组合等,但不限于此。
[0117]
马达111用于使螺旋桨110旋转,例如,驱动单元可以包括电动马达或发动机等。桨叶可由马达驱动,并绕马达的旋转轴(例如马达的长轴)旋转。
[0118]
桨叶可以全部沿相同方向旋转,也可以独立地旋转。一些桨叶沿一个方向旋转,其他桨叶沿另一方向旋转。桨叶可以全部以相同转速旋转,也可以分别以不同转速旋转。转速可以基于移动体的尺寸(例如大小、重量)、控制状态(速度、移动方向等)自动或者手动地确定。
[0119]
飞行体100通过飞行控制器、遥控器等,根据风速和风向决定各马达的转速、飞行角度。由此,飞行体能够进行上升和下降、加速和减速、或转向这样的移动。
[0120]
飞行体100能够进行按照事先或飞行中设定的路线、规则的自主飞行、基于使用遥控器的操纵的飞行。
[0121]
上述飞行体100具有图11所示的功能块。此外,图11的功能块是最低限度的参考结构。飞行控制器是所谓的处理单元。处理单元可以具有可编程处理器(例如中央处理单元(cpu))等一个以上处理器。处理单元具有未图示的存储器,并且能够访问该存储器。存储器存储有为了进行一个以上步骤而能够由处理单元执行的逻辑、代码和/或程序指令。存储器例如也可以包括sd卡、随机存取存储器(ram)等可分离的介质或外部存储装置。从相机、传感器类获取的数据也可以直接传递并存储到存储器中。例如,由相机等拍摄的静止图像和动态图像数据被记录在内置存储器或外部存储器中。
[0122]
处理单元包括构成为控制旋翼机的状态的控制模块。例如,控制模块控制旋翼机的推进机构(马达等),以调整具有六自由度(平移运动x、y和z、以及旋转运动θ
x
、θy和θz)的旋翼机的空间配置、速度和/或加速度。控制模块能够控制搭载部、传感器类的状态中的一
个以上。
[0123]
处理单元能够与收发部进行通信,该收发部构成为发送和/或接收来自一个以上外部设备(例如终端、显示装置或其他远程控制器)的数据。收发机能够使用有线通信或无线通信等任意适当的通信方式。例如,收发部能够利用局域网(lan)、广域网(wan)、红外线、无线、wifi、点对点(p2p)网络、电信网络、云通信等中的一种以上。收发部能够发送和/或接收由传感器类获取的数据、处理单元生成的处理结果、规定的控制数据、来自终端或远程控制器的用户命令等中的一种以上。
[0124]
本实施方式的传感器类可以包括惯性传感器(加速度传感器、陀螺仪传感器)、gps传感器、接近传感器(例如雷达)或视觉/图像传感器(例如相机)。
[0125]
本发明的实施方式中的飞行体100所具备的螺旋桨110的旋转面成为在行进时朝向行进方向前倾的角度。通过前倾的螺旋桨110的旋转面,产生向上的升力和向行进方向的推力,由此,飞行体100前进。
[0126]
飞行体100也可以具备主体部,该主体部能够内置要搭载的处理单元、电池等。主体部将期待在飞行体100的移动过程中长时间维持的巡航时的飞行体100的姿势下的形状优化,提高飞行速度,从而能够高效地缩短飞行时间。
[0127]
主体部优选具备外皮,该外皮具有能够承受飞行、起飞和降落的强度。例如,塑料、frp等由于具有刚性、防水性而适合作为外皮的材料。这些材料可以是与飞行部中包含的机架120(包括臂)相同的材料,也可以是不同的材料。
[0128]
另外,飞行部所具备的马达支架、机架120和主体部可以将各个零件连接而构成,也可以利用硬壳式构造、一体成型而成型为一体(例如,将马达支架和机架120一体成型、将马达支架、机架120和主体部全部一体地成型等)。通过使零件为一体,能够使各零件的接缝平滑,因此能够期待翼身融合体、升力体这样的飞行体所具有的阻力的降低、燃料效率的提高。
[0129]
飞行体100的形状可以具有指向性。可以列举出在飞行体的机头正对风时提高飞行效率的形状,例如,飞行体100在无风下的巡航时的姿势下具有小阻力的流线型的主体部等。
[0130]
与飞行体连接的悬挂部件10由互不相同的第一部分10a和第二部分10b构成。
[0131]
第一部分10a是绳状的部件,并优选为轻量,以减轻在连接第一部分10a的状态下对待飞行的飞行体100的负荷。另外,在具备能够承受飞行体100所具有的推进力或搭载物的重量的强度的情况下,能够防止飞行体100、搭载物意外地被释放。
[0132]
由此,作为用于悬挂部件的第一部分10a的材料的例子,可以列举出使用了棉、麻等的绳索、使用了尼龙、氟碳、聚酯、聚乙烯等树脂的高强度线部件等。另外,在使用使用了铜线、铝线的电线等的情况下,能够经由悬挂部件10进行供电。
[0133]
但是,在停靠口、人抓持悬挂部件10、或者通过对悬挂部件10施加压力而使飞行体、搭载物升降的情况下,存在第一部分10a的细度成为障碍的情况。通过使第一部分10a变粗,能够简便地进行抓持等,但在使用较粗的部件的情况下,悬挂部件10的重量和空气阻力会增加,预计会引起对飞行体100的负荷的增加、悬挂部件10的松弛、搭载物向下风的摆动,难以兼顾抓持等的简便性。
[0134]
因此,本发明的悬挂部件10如图12和图13所例示的那样,构成为仅在悬挂部件10
中进行抓持的规定范围内使用与第一部分10a不同的第二部分10b,由此,通过最低限度的重量和空气阻力的增加使得抓持容易。
[0135]
第二部分10b是与第一部分10a不同的结构的部件(例如,粗度、截面的形状、表面或全部的材料等不同),优选使用与第一部分相比表面的摩擦系数更高或面积更大的部件。
[0136]
在第一部分10a和第二部分10b由相同的材料构成的情况下,如图14至图16所例示的那样,通过将第二部分10b的粗度变更为比第一部分10a粗,能够使抓持等容易,实现防止脱落、提高系留的可靠性等,并能够使悬挂部件的重量增加成为最小限度。另外,通过变更第二部分10b的材料,也能够期待同样的效果。
[0137]
在变更第二部分10b的材料的情况下,在第一部分10a的构成部件和第二部分10b中,第二部分10b优选使用与第一部分10a相比表面的摩擦系数更高的材料(例如,由橡胶、硅酮、乙烯等覆盖的线缆、由棉、金属捻合而成的绳索等)。特别是,第二部分10b可以如图14所例示的那样截面形状为圆形,但可能存在如果如图15、16所例示的那样截面形状为多边形,则抓持变得容易的情况。
[0138]
作为具体的结构例,如图17所示,可以列举出第一部分10a为聚乙烯制的渔线、第二部分10b为使用了维尼纶和聚酯的混纺线的绳索的结构。此时,第二部分10b使用与第一部分10a相比更粗且摩擦系数更高的材料。另外,如图18所示,可以列举出第一部分10a为绳状的部件、第二部分10b使用握持力高的树脂的成型部件(特别是在表面具有凹凸形状的部件)的结构。在该情况下,第二部分10b也是与第一部分10a相比更粗且摩擦系数更高。但是,与第二部分10b使用绳状的材料的情况相比,挠性降低,因此在伴有绞盘等的情况下,也可能存在难以利用绞盘进行卷扬的情况。
[0139]
另外,也可以是,通过对由与第一部分10a相同的材料构成的第二部分10b进行摩擦系数高的材料的覆盖,在增加摩擦力的同时使直径变粗。
[0140]
设置第二部分10b的位置、范围由飞行体100的用途决定。例如,如图19至图25所示,在进行递送的飞行体100使与悬挂部件10连接的搭载物11(货物)下降,在停靠口抓持悬挂部件10而辅助卸货的结构中,停靠口抓持的悬挂部件10的第二部分10b处于搭载物附近的有限的范围内。
[0141]
如图1和图2所示,本发明的实施方式的悬挂部件10能够与限位装置30组合使用。另外,在以下的说明中,关于与本发明的实施方式的限位装置30组合使用的飞行体100,使用多旋翼机作为示例,但并非在本发明的实施中对飞行体的形态、动作进行限定。例如,在固定翼机、vtol机、直升机等中当然也能够组合使用。
[0142]
限位装置30具备在悬挂部件10进入规定位置时能够通过堵塞或缩小进入口来限制移动、或者能够夹持或抓持悬挂部件10的结构,由此限制飞行体100的移动。
[0143]
限位装置30如图3至8所例示的那样,也可以具备引导部31,该引导部31引导悬挂部件10以使其能够容易地进入能够由限制部件32进行限位的位置。另外,至少一部分被引导部31包围且具备能够供悬挂部件10进入的开放部的被包围空间33,如图3至5所示,也能够用作通过限制部件32的动作来固定悬挂部件10的空间。此外,该限制部件32的结构可以与通过对悬挂部件10进行直接抓持等来限制移动的结构进行组合,也可以是,进行图6至图8所例示的、通过引导部31大致地限制悬挂部件10的移动的第一步骤,之后,通过利用对悬挂部件10的第二部分10b进行直接抓持等来限制移动的限制部件32的第二步骤来精细地限
制移动。
[0144]
例如,如图4和图5所例示的那样,通过将限制部件32作为滑动、折弯等的可动部件来堵塞进入口,能够限制x方向和y方向的移动。图3和图4所示的限制部件32为环形锁形状,在悬挂部件10进入规定位置时闩旋转,来进行悬挂部件10的限位。图5所示的限制部件32在不使用时前端朝向+y方向被收纳,在悬挂部件10进入规定位置时分别朝向内侧转动,进行悬挂部件10的限位。另外,在限制部件32如图6至图8那样进行悬挂部件10的抓持的情况下,也能够限制x、y、z全部方向的移动。
[0145]
在图6至图8所例示的限位装置30中,限制部件32可以只是抓持悬挂部件10的第二部分10b的抓持部,但例如也可以是卷扬装置的辊部,在悬挂部件10进入后,能够通过辊部以旋转轴34为中心旋转来下降。另外,能够通过反转旋转方向来上升。在图7和图8所例示的限位装置30中,在悬挂部件10位于规定范围(在此为推测为转动到图8的位置的辊部的旋转会影响的范围)内时,引导部31和限制部件32转动,在夹持悬挂部件10的第二部分10b之后,能够通过辊部旋转来升降。此外,限制部件32只要具有限制悬挂部件10的移动量的效果即可,限制的方法不限于上述例子。
[0146]
在限位装置30具备卷扬装置的辊部作为限制部件32的情况下,如果飞行体100所具备的卷扬机14配合辊部的旋转方向和速度进行悬挂部件10的放出、卷扬,则飞行体的z方向的位置不产生变化,悬挂部件10、搭载物11的z方向的位置产生变化。在即使限位装置30所具备的卷扬装置的辊部旋转,飞行体100所具备的卷扬机14也不进行动作的情况下,飞行体100的z方向的位置变化。通过控制限位装置30所具备的卷扬装置和飞行体100所具备的卷扬机14的动作起作用的方法、时机,能够控制飞行体100、搭载部11在z方向的移动量、速度。
[0147]
限位装置也可以具备感知悬挂部件10进入规定位置的传感器(例如光学传感器、压敏传感器、红外线传感器等)、物理触发器(线缆、线、挂钩等)。另外,也可以基于输入到传感器的信息,使限制部件32动作。例如,传感器感知图6所示的悬挂部件10移动到图7的位置,由此,限制部件32动作,进行悬挂部件10的限位。
[0148]
与飞行体100连接的悬挂部件10也可以在不同于与飞行体100连接的端部的端部上连接搭载物11,其包括要运输的货物、内置货物的箱体、进行摄影、检查的相机、收音设备、传感器类、颗粒体散布设备、液体喷雾设备、检查设备、进行规定作业的作用部等。另外,悬挂部件10和搭载物11也可以以能够自动或手动解除连接的方式进行连接。
[0149]
在悬挂部件10由线缆、线、链、绳子等能够向卷轴卷绕的材料构成的情况下,如图19和图20所例示的那样,能够使用飞行体所具备的绞盘、提升机等卷扬机14进行放出、卷扬。
[0150]
另外,如图24和图25所例示的那样,与悬挂部件10连接的搭载部11也可以具备悬挂部移动单元13(例如,螺旋桨、空气的吹出装置等)。悬挂部件10、搭载部11能够通过悬挂部移动单元13进行独立于飞行体100的动作的移动。悬挂部移动单元13可以相对于搭载部11仅装备在一个方向侧,但不限于此,也可以以能够在xy方向上自由移动的方式装备在至少两个方向上(例如,在图25中,进一步在纸面近前侧进行悬挂部移动单元13的设置等,从而使多个悬挂部移动单元13的推进力方向错开90度配置等)。
[0151]
如图1和图2所例示的那样,将悬挂部件10收容在被包围空间33内的方法,除了通
过飞行体100进行平面移动或与悬挂部件10连接的搭载物11进行平面移动而使悬挂部件10移动并进入的方法之外,还有限位装置30的至少一部分接近悬挂部件10并收容在被包围空间33内的方法。
[0152]
在使用限位装置30接近悬挂部件10的方法的情况下,限位装置30具备机械臂、轨道系统等能够沿x方向、y方向、z方向中的至少任意一个方向移动引导部31、限制部件32的结构。由此,连接悬挂部件10的飞行体100能够通过在规定范围内进行悬停来接受限位。
[0153]
在悬挂部件10进入被包围空间33后,悬挂部件10被限制部件32限制移动。移动的限制方法例如有如上述图3至图5那样将限制部件32作为可动部件并堵塞开放部的方法、如图6至图8那样将限制部件32作为抓持装置、卷扬装置并进行固定的方法,而在图21至图23中,示出了将限制部件32作为卷扬装置、抓持装置并向收货部40卸货的情况的具体例。
[0154]
在限制部件32作为图6至图8所例示的卷扬部和抓持部而一体地构成的情况、作为图21至图23所例示的卷扬装置而另外具有地构成的情况、作为图26和图27所例示的具有抓持部的臂而构成的情况等、具有抓持或固定悬挂部件10并使其移动的功能的情况下,能够不依赖于飞行体100、搭载物11的动作而使悬挂部件10向任意位置移动。例如,在将配送货物连接于悬挂部件10的情况下,如果抓持悬挂部件的位置不适合对收货部40卸货,则限位装置30能够通过卷扬部(卷扬装置)的卷扬、臂的弯曲等变形来变更配送货物的高度(z方向)、水平(xy方向)的位置,成为适合于配送货物的分离的高度。由此,不需要利用与飞行体100连接的设备进行位置调整。
[0155]
在使用限制部件32抓持悬挂部件10的结构(例如,卷扬装置、夹具、磁铁等)的情况下,能够通过限位装置30进行飞行体100的系留。另外,能够利用卷扬装置14限制飞行体100的平面移动量,并进行升降。由此,能够在比规定高度高的位置系留飞行体100,防止飞行体100的非预期的平面移动、失控,并使其进行下降、降落。反之,也能够在使系留在高度较低的位置的飞行体100上升到规定高度后释放,从而防止上升到规定高度之前的飞行体100的平面移动、失控。
[0156]
由于利用限位装置30进行悬挂部件10以及与悬挂部件10连接的搭载物11的移动,因此限位装置30除了卷扬装置、臂等之外,还可以具备用于识别物体的位置等的传感器、用于获取移动量等的处理装置,由此,使搭载物11、飞行体100移动到规定位置时的位置控制精度提高。
[0157]
在限位装置30不被使用期间,包含引导部的限位装置也可以如图26至图27所例示的那样部分或全部折叠、或者收纳在建筑物等结构物中。例如,在收纳在防止暴露于风雨等的屋顶下、结构物的内侧的情况下,能够防止限位装置的劣化、损伤。
[0158]
近年来,对于递送以外的产业(例如检查、调查、拍摄、监视、农业、防灾等),也在探讨、实施各种形态的飞行体的利用。根据运用环境,有时难以准备飞行体的降落空间。例如,在检查高处的桥梁时,存在距地面的距离远、或者因河流、海洋等而无法接近桥梁附近的情况。此时,通过与桥梁连接的限位装置30系留或抓持飞行体,能够临时用作起降设备。
[0159]
限位装置30也可以装备于移动体(车辆、船舶、铁路、飞行体等)。移动体能够仅在规定范围内移动、或者移动没有限制。
[0160]
另外,以上,以与限位装置30组合的使用为例进行了说明,但本发明的悬挂部件即使在如图28所例示的那样由人的手进行抓持的情况下,也能够成为提高易抓持性、易发力
性等的手段。
[0161]
设置第二部分10b的位置根据限位装置等对悬挂部件的作用位置而不同。第二部分10b除了如图1那样位于两端被第一部分夹持的位置之外,也可以如图20和图28所例示的那样位于第一部分10a的端部。另外,在被抓持部分有多个的情况下,如图29所例示的那样,也可以在一根悬挂部件10中设置多个第二部分10b。此时,第二部分10b的材料、形状可以分别相同,也可以不同。另一方面,在图29所例示的结构中,也可能存在仅抓持与搭载部11连接的悬挂部件的情况、仅抓持与飞行体100连接的悬挂部件的情况,因此也可以仅在任一方的悬挂部件10上具备第二部分10b。
[0162]
上述实施方式仅是为了容易理解本发明而例示的,并不用于限定地解释本发明。本发明可以在不脱离其主旨的范围内进行变更、改进,并且本发明当然包括其等同形式。另外,各实施方式中示出的特征只要不相互矛盾,也可以应用于其他实施方式。
[0163]
附图标记说明
[0164]
10:悬挂部件;
[0165]
10a:第一部分;
[0166]
10b:第二部分;
[0167]
11:搭载物、货物;
[0168]
13:悬挂部移动单元;
[0169]
14:卷扬机;
[0170]
30:限位装置;
[0171]
31:引导部;
[0172]
32:限制部件;
[0173]
33:收容空间(被包围空间);
[0174]
34:旋转轴;
[0175]
40:负荷承受部;
[0176]
100:飞行体;
[0177]
110a至110e:螺旋桨;
[0178]
111a至111e:马达;
[0179]
120:机架;
[0180]
200:结构物。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1