一种基于单目视觉的大型舱段位姿偏差测量方法与流程
本发明属于高精度位姿测量领域,具体涉及一种基于单目视觉的大型舱段位姿偏差测量方法。
背景技术:
1、在航空、航天制造领域中,大型壳体舱段的对接工作长期依赖人工,此类大型壳体部件体积大,对接精度要求高,需要两到三人从不同位置观察舱段对准情况,时常需要进行登高作业,存在一定安全隐患,且调节量无法做到直观量化,极度依赖观察人员的操作经验。在此背景下,对舱段对接生产线提出了高精度测量要求,替代人工操作;高精度数字化测量可以与电动调姿机构相互配合,实现舱段测量、对接过程的自动化,无需工人参与。
2、专利号cn105015800a公开一种采用激光跟踪仪测量的方法,使用激光跟踪仪靶球测量对接端面,使用t-probe跟踪舱段位置引导对接过程;激光跟踪仪的使用过程仍然对现场操作人员提出较高的要求,需进行专门培训,且该方案使用激光跟踪仪、t-probe及多个靶球,整体方案成本较高,不利于广泛使用。
3、专利号cn105910535a公开一种采用单相机、双相机结合的测量方法,双相机在离线状态对待对接舱段进行标定,对接工位使用两台单目相机,各自对固定端、移动端舱段进行测量;该方案将标定过程移至测量工位外,在对接过程中无需人工参与,但是由于舱段存在一定加工公差及表面形状误差,使用弧形卡具将销和孔位姿信息引出、喷印在舱段侧面的方式难免导致弧形卡具与舱段贴合不紧,喷印的特征点边缘模糊、圆度差,与实际销和孔的位置存在偏差,使用两台相机对舱段分别测量,也会引入转换误差。
4、专利号cn105081719a公开一种使用单相机引导舱段对接的方法,采用手持式移动靶标定对接舱段相对位置关系,固定靶用于跟踪移动端舱段位置;该方法使用单台相机测量端面移动靶、侧面固定靶,覆盖范围较大,为保证测量精度,移动靶与固定靶的尺寸较大,在大型舱段对接场景中,移动靶操作不便,固定靶安装难度大。
技术实现思路
1、本发明的目的在于提供一种基于单目视觉的大型舱段位姿偏差测量方法,靶标布置位置灵活,坐标转换环节少,测量精度高,简单可靠。
2、实现本发明目的的技术解决方案为:
3、一种基于单目视觉的大型舱段位姿偏差测量方法,包括步骤:
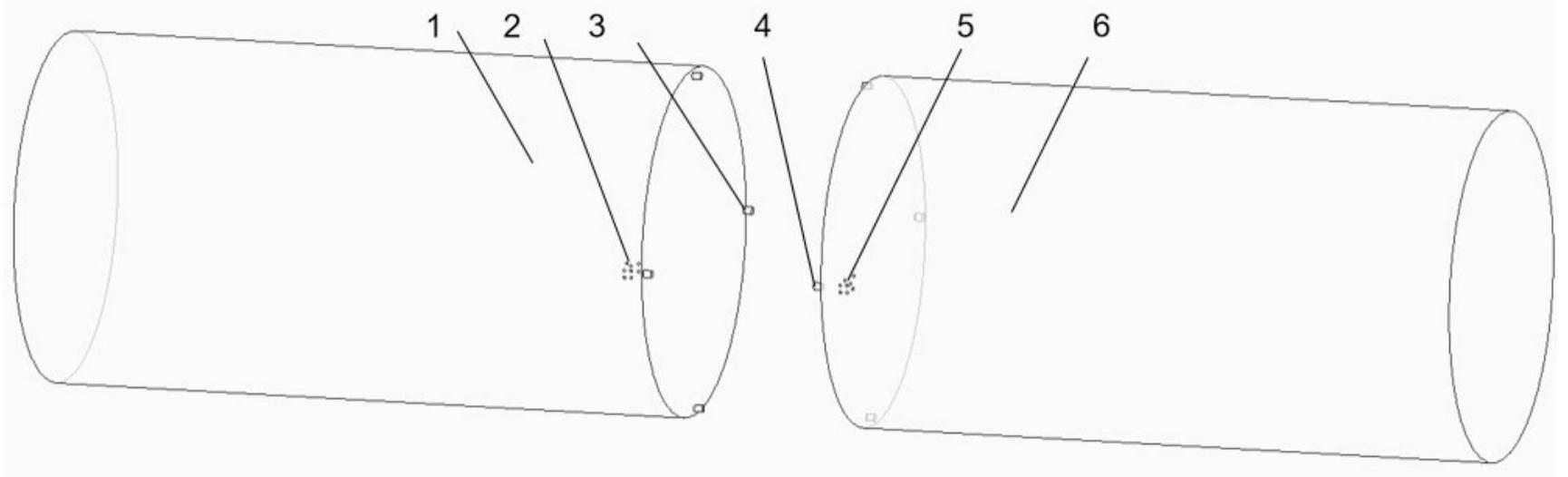
4、1)在移动端和固定端舱段的侧面粘贴测量点,对接端面的定位销及定位孔处放置带有端面测量点的工装;
5、2)使用摄影测量设备或三维扫描仪分别获取移动端及固定端测量点在世界坐标系下的三维点坐标;
6、3)将测量移动端及固定端所获得的两组点集分别将坐标原点转换至舱段端面圆心,转换后的三维点坐标保存至系统数据库中,三维点坐标与舱段具有一一对应关系;
7、4)单相机同时获取移动端及固定端侧面测量点的图像,解算移动端与固定端之间的相对位姿偏差:
8、固定端与移动端粘贴的测量点各自具有特定的排列顺序,以便于测量系统在图像中对两部分靶标进行区分,通过识别到的测量点进行pnp位姿估计,分别获取相机相对两处测量点的位置及姿态,通过矩阵变换,即可求得两舱段之间的相对位姿偏差。
9、与现有技术相比,本发明的有益效果在于:
10、(1)采用粘贴式的侧面测量点及外部标定的方式,粘贴时对粘贴位置无精确要求,对接完成后可撕除,不会在舱段表面留有残留,标定后三维点数据与舱段信息绑定,保存至数据库中,随时可调用并用于对接;
11、(2)标定过程采用摄影测量或三维扫描设备进行标定,手持即可完成标定,精度可达0.03mm,不受标定舱段形状、尺寸限制,舱段在任意厂房、任意位置均可进行标定,标定过程与对接过程分离,对接时调用标定文件,简化对接流程;
12、(3)采用单相机测量的方式,相机仅测量测量点区域,测量精度高,相比于双目相机的测量方式,单个相机占用体积小,易于安装到agv、机械臂等狭小安装位置,视场不易受到遮挡;
13、(4)本发明相较于人工观察,可节省2~3名操作工人,人工观察并判断偏差用时约30s,使用相机单次测量时间约1.5s,结合自动化调姿机构,可将对接时间缩短至3min内。
技术特征:
1.一种基于单目视觉的大型舱段位姿偏差测量方法,其特征在于,包括步骤:
2.根据权利要求1所述的基于单目视觉的大型舱段位姿偏差测量方法,其特征在于,所述侧面测量点由圆点型测量点规则排列,且移动端、固定端的侧面测量点排列方式不同,粘贴的周向位置相同,粘贴区域100mm*100mm。
3.根据权利要求1所述的基于单目视觉的大型舱段位姿偏差测量方法,其特征在于,所述端面测量点为4个,两两对称,端面测量点的工装与舱段定位孔之间的间隙为0.02mm。
4.根据权利要求1所述的基于单目视觉的大型舱段位姿偏差测量方法,其特征在于,所述步骤2中的世界坐标系下的三维点坐标通过手持三维扫描仪或摄影测量设备获取。
5.根据权利要求1所述的基于单目视觉的大型舱段位姿偏差测量方法,其特征在于,所述步骤3包括:对舱段侧面测量点及舱段端面测量点间相对位置进行标定,固定端的侧面测量点与端面测量点保存在同一坐标系下,移动端的侧面测量点与端面测量点保存在同一坐标系下,两坐标系均建立在对接端面圆心处,当两对接端面贴合时,两坐标系重合。
6.根据权利要求5所述的基于单目视觉的大型舱段位姿偏差测量方法,其特征在于,所述步骤3中将测量移动端及固定端所获得的两组点集的坐标系原点转换至舱段端面圆心具体包括:
7.根据权利要求6所述的基于单目视觉的大型舱段位姿偏差测量方法,其特征在于,所述步骤4中移动端及固定端侧面图像通过单目相机获取。
8.根据权利要求1所述的基于单目视觉的大型舱段位姿偏差测量方法,其特征在于,所述步骤4具体包括:
9.根据权利要求8所述的基于单目视觉的大型舱段位姿偏差测量方法,其特征在于,所述获取相机坐标系与测量点坐标系转换的齐次矩阵包括:
10.根据权利要求8所述的基于单目视觉的大型舱段位姿偏差测量方法,其特征在于,所述建立调姿机构坐标系具体包括:
技术总结
本发明提供了一种基于单目视觉的大型舱段位姿偏差测量方法,包括:在移动端和固定端舱段的侧面粘贴测量点,对接端面的定位销及定位孔处放置带有端面测量点的工装;获取移动端及固定端的侧面及端面测量点在世界坐标系下的三维点坐标;分别将测量移动端及固定端所获得的两组点集的坐标系原点转换至舱段端面圆心,转换后的三维点坐标及标定矩阵保存至系统数据库中,三维点坐标与舱段编号具有一一对应关系;待对接舱段到达对接工位,获取移动端及固定端侧面图像,识别固定端、移动端的侧面测量点,结合侧面测量点的三维空间坐标,解算移动端与固定端之间的相对位姿偏差。本发明靶标布置位置灵活,坐标转换环节少,测量精度高,简单可靠。
技术研发人员:王超,叶凯玉,姚家琛,朱家洲,张前进,李鸿向,于洋,邬倩云
受保护的技术使用者:南京晨光集团有限责任公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!