一种风电机组叶片无人机除冰组件及方法
1.本发明涉及风电机组叶片除冰技术领域,具体涉及一种风电机组叶片无人机除冰组件及方法。
背景技术:
2.目前风力发电机组的工作环境在风力资源较为丰富的室外,针对内蒙古等北方高寒地区的风电机组叶片,当气温降到零摄氏度以下时,风力发电机叶片上可能就会结冰,冰附着在叶片上,不仅影响了叶片的气动性能,降低了风力发电机装置的发电效率,还增加了整个风力发电机装置的动静载荷,对整机强度和稳定性产生更为不利的影响;因此,防止和及时去除风机叶片上的结冰,对于保证风力发电机装置的正常高效运行有着极为重要的意义。
3.现有的方式例如公开号为101821500a的“用于给风轮机的叶片除冰的方法、风轮机及其使用”,其在风电机组叶片上安装一个装置进行除冰,即对风电机组全部停机后,整体进行除冰;但是无法选择对单独覆冰的风电机组叶片进行单独的除冰;基于此技术背景之下,发明人设计一种风电机组叶片无人机除冰组件及方法。
技术实现要素:
4.本发明提供了一种风电机组叶片无人机除冰组件及方法,旨在解决如何对单独覆冰的风电机组叶片进行除冰的问题,实现局部除冰。
5.本发明的第一方面目的在于提出一种风电机组叶片无人机除冰组件,包括无人机组件及除冰组件,无人机组件,除冰组件固定于无人机组件下侧;无人机组件用于带动除冰组件飞行到指定位置;除冰组件包括固定架、除冰剂存储箱及用于将除冰剂存储箱内除冰剂泵出的除冰控制系统;除冰剂存储箱通过固定架固定于无人机组件的下侧。
6.进一步,固定架为双轨的倒u型结构,其上具有横梁;两侧端部通过过渡段连接再一起;固定架上侧通过安装板与无人机组件固定;除冰剂存储箱横跨于横梁之上,且与安装板固定。
7.进一步,除冰剂存储箱内侧通过隔板划分为除冰剂室与控制室;除冰剂室上方具有与内部相连通的加液口,加液口上可拆卸配合有封盖;除冰剂存储箱的底部设有除冰管路,除冰管路的一端延伸于除冰剂室内部,除冰管路的另一端与延伸至控制室一侧,且端部固定有喷头;在除冰管路上设有隔膜泵。
8.进一步,除冰控制系统包括喷射控制系统和显示遥控系统;喷射控制系统与显示遥控系统通过无线传输模块通信连接;通过显示遥控系统发送控制指令,无线传递给喷射控制系统进行除冰剂喷洒。
9.进一步,显示遥控系统包括,显示遥控主控模块,用于将喷射控制系统的按键模块控制命令发送给喷射控制系统,及接收喷射控制系统的传感器模块采集信息;
显示模块,显示模块与显示遥控主控模块电连接,用于接收显示遥控主控模块的信号,实时显示喷射控制系统的传感器模块采集的信息;电源模块,用于对显示遥控主控模块和外围电路进行供电无线传输模块,无线传输模块与显示遥控主控模块电连接,用于在显示遥控系统与喷射控制系统之间进行信息传递;按键模块,与显示遥控主控模块电连接,用于将控制命令发送给显示遥控主控模块;指示灯模块,与显示遥控主控模块电连接,用于对按键模块进行按动指示。
10.进一步,按键模块包括按键key0-key3;按键key0用于发送打开指令给显示遥控主控模块;按键key1用于发送高速喷射指令给显示遥控主控模块;按键key2用于发送关闭指令给显示遥控主控模块;按键key3用于发送最适流量喷射指令给显示遥控主控模块。
11.进一步,喷射控制系统包括,喷射控制主控模块,用于接收喷射控制系统的按键模块控制命令,及将传感器模块采集信息发送给显示遥控系统;电源模块,包括9v主控模块电源和12v外围电路电源,用于对喷射控制主控模块极其外围电路供电;无线传输模块,无线传输模块与喷射控制主控模块电连接,用于在显示遥控系统与喷射控制系统之间进行信息传递;传感器模块包括,激光测距传感器,与喷射控制主控模块电连接,用于检测喷射控制装置与风电机组叶片的距离,传递信号给喷射控制主控模块;液位传感器,与喷射控制主控模块电连接,设置于除冰剂室内部的侧壁底部,用于检测除冰剂的液位信息;当除冰剂室内的除冰剂的低于安全液位时,喷射控制主控模块,控制隔膜泵立即停止工作;霍尔流量传感器,与喷射控制主控模块电连接;设置于除冰管路上,且位于隔膜泵与喷头之间,用于检测喷射除冰剂的流量;双温度传感器,与喷射控制主控模块电连接,用于检测除冰剂的温度。
12.隔膜泵通过驱动控制模块连接于喷射控制主控模块。
13.进一步,激光测距传感器,激光测距传感器为两个,其设置于控制室的侧壁上且位于喷头的左右两侧;两个激光测距传感器与喷头三者共平面。
14.进一步,喷射控制主控模块用于接收霍尔流量传感器将采集到的实际流量信号,将实时流量信号与流量给定值信号进行比较得到差值,经过pid控制器的离散式pid控制算法运算处理,输出pwm信号;通过驱动控制模块自动调节隔膜泵。
15.本发明的第二方面目的在于提出一种风电机组叶片除冰方法,其特征在于:包括以下步骤:1.利用遥控器,对发送遥控信号给无人机组件,驱动无人机组件起飞,靠近风电机组叶片;2.激光测距传感器检测本装置与风电机组叶片的距离信号,双温度传感器检测的除冰剂温度信号;通过电信号传递给喷射控制主控模块,喷射控制主控模块通过无线传输模块传递给显示遥控系统的显示模块;利用遥控器发送遥控信号给无人机组件,对位置进
行微调;3.按动按键key0,led1亮,显示遥控主控模块通过无线传输模块向喷射控制主控模块发送发送打开指令信号;按动key2,led3亮,显示遥控主控模块向喷射控制主控模块发送最适流量喷射指令信号;喷射控制主控模块控制隔膜泵工作,将除冰剂通过除冰管路、喷头喷洒在风电机组叶片上;4.霍尔流量传感器,将除冰管路内的实时流量信号传递给喷射控制主控模块,喷射控制主控模块将实时流量信号与流量给定值信号进行比较,经过pid控制器输出pwm信号;进行流量负反馈闭环控制自动调节,保持喷洒稳定;5.按动key1,led2亮,显示遥控主控模块向喷射控制主控模块发送高速喷射指令,喷射控制主控模块控制隔膜泵工作,将除冰剂通过除冰管路、喷头喷洒在风电机组高速叶片上;6.冰除尽后,按动key2,led3亮,显示遥控主控模块向喷射控制主控模块发送关闭指令;喷射控制主控模块控制隔膜泵停止。
16.本发明所达到的有益效果为:除冰控制系统包括喷射控制系统和显示遥控系统;喷射控制系统与显示遥控系统通过无线传输模块通信连接;通过显示遥控系统发送控制指令,无线传递给喷射控制系统进行除冰剂喷洒;喷射控制系统主要完成接收显示遥控系统的喷射控制命令的信号执行,驱动隔膜泵直流电机控制除冰剂喷射,完成除冰目的,同时传感器模块实现信息采集、处理和传输,最终显示在显示遥控系统显示模块上。
附图说明
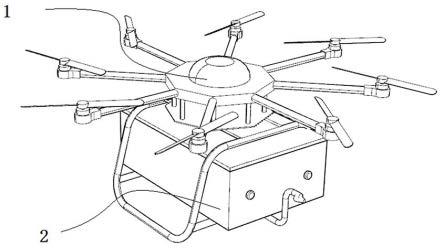
17.图1是本发明的整体结构示意图。
18.图2是本发明的固定架结构示意图。
19.图3是本发明的除冰剂存储箱结构示意图。
20.图4是本发明的喷射控制系统与显示遥控系统框图。
21.图5是本发明的显示遥控系统电路示意图。
22.图5a是本发明的显示遥控主控模块的电路示意图。
23.图5b是本发明的稳压电路示意图。
24.图5c是本发明的时钟电路示意图。
25.图5d是本发明的复位电路示意图。
26.图5e是本发明的boot启动电路示意图。
27.图5f是本发明的swd调试电路示意图。
28.图6是本发明的喷射控制系统的电路示意图。
29.图7是本发明的激光测距传感器第一种安装位置示意图。
30.图8是本发明的激光测距传感器第二种安装位置示意图。
31.图9是本发明的驱动控制模块电路示意图。
32.图10是本发明的驱动控制硬件系统结构图。
33.图11是本发明的驱动控制系统控制结构图。
34.图中,1、无人机组件;2、除冰组件;3、固定架;4、除冰剂存储箱;5、横梁;6、隔板;7、除冰剂室;8、控制室;9、封盖;10、除冰管路;11、喷头;12、隔膜泵。
具体实施方式
35.为便于本领域的技术人员理解本发明,下面结合附图说明本发明的具体实施方式。
36.为了清楚的理解本技术技术方案,下面将结合具体实施例和附图对本技术提供的座椅进行详细说明。
37.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通;对于本领域的普通技术人员而言,可以通过具体情况理解上述术语在本发明中的具体含义。
38.如图1所示,本发明的第一方面提供了一种风电机组叶片无人机除冰组件2;包括无人机组件1及除冰组件2;无人机组件1选择现有的八旋翼或四旋翼无人机作为载具,将除冰组件2固定于无人机组件1下侧,通过遥控器对无人机组件1进行控制;进行除冰作业前首先检查各模块连线,电池供电等,通过数据线连接笔记本电脑进行经地面调试、参数设置等,完成初始化设置;飞行过程中要求飞手及时准确应对突发状况,能够对相应故障应急处理,保证无人机装置安全着陆或返航;除冰组件2包括固定架3、除冰剂存储箱4及用于将除冰剂存储箱4内除冰剂泵出的除冰控制系统;首先对硬件结构进行介绍,其中固定架3为双轨的倒u型结构,其上具有横梁5;两侧端部通过过渡段连接再一起;固定架3上侧设有安装板,通过安装板与无人机组件1固定;除冰剂存储箱4横跨于横梁5之上,其上侧与安装板固定;如图3所示,除冰剂存储箱4内侧设有隔板6,通过隔板6划分为除冰剂室7与控制室8;除冰剂存储箱4上设有与除冰剂室7内部相连通的加液口,加液口上螺纹配合有可拆卸的封盖9;打开封盖9,方便向除冰剂室7内补充除冰剂;除冰剂存储箱4的底部设有除冰管路10,除冰管路10的一端延伸于除冰剂室7内部,与除冰室内部相连通;除冰管路10的另一端与延伸至控制室8一侧,除冰管路10端部固定于控制室8的外侧且与喷头11固定;喷头11选择虹吸口锥形喷头11,压力作用下喷射出水柱,对风电机组覆冰喷洒造成冲击效果,有助于除冰剂渗入覆冰与风电机组叶片表面接触面,造成覆冰脱落;在除冰管路10上设有隔膜泵12,隔膜泵12用于将除冰剂室7内的除冰剂,隔膜泵12具有可抽粘性、浓度大等液体,具备自吸能力,隔膜泵12具体采用雨露0.48小功率内回流隔膜泵12,该隔膜泵12具有体积小、压力大、控制简单、价格低廉等优点,满足喷射控制系统装置功能。
39.除冰控制系统包括喷射控制系统和显示遥控系统;喷射控制系统与显示遥控系统通过无线传输模块通信连接;通过显示遥控系统发送控制指令,无线传递给喷射控制系统进行除冰剂喷洒。
40.其中,显示遥控系统主要完成喷射控制系统的喷射控制命令发送和喷射控制系统传感器采集信息的实时显示功能,如图4所示显示遥控系统包括显示遥控主控模块,及与显示遥控主控模块连接的显示模块、电源模块、无线传输模块、按键模块及指示灯模块。
41.显示遥控主控模块采用stm32系列增强型32位stm32f103c8t6芯片;该芯片基于arm cortex-m 内核,具有48个引脚,存储器容量64kb,lqfp封装,工业级温度范围-40
°
—c~85
°
c,供电电压2v~3.6v;如图5a所示为显示遥控主控模块的电路示意图;显示模块配置接
口为pa0-pa7;usart可用于串口调试和无线传输模块,配置接口为pa8-pa10;按键模块及指示灯模块,key0-key3和led0-led3,配置接口为pb0-pb11。
42.显示遥控主控模块还包括:稳压电路、时钟电路、复位电路、boot启动电路、swd调试电路。
43.图5b为稳压电路示意图,稳压电路用于保证系统稳定运行,stm32芯片要求2.0~3.6v的操作电压,控制电路中要求3.3v控制电压,通过两路3.3v稳压电路;稳压电路将9v电压转换成两路3.3v分别显示遥控主控模块和其余电路供电;其中dc-dc稳压电路中正向低压降稳压电源芯片ams1117-3v3,封装sot223,精度1%,工作温度范围-40
°
c~+125
°
c,满足温度使用要求,长宽高6.4
×7×
1.6mm,具有过热切断、限流保护功能。
44.图5c为时钟电路示意图,主频时钟选择8mhz频率晶振方便倍频,外部时钟选择32.768khz频率晶振,提供精确时钟源,实时精准计时;晶振两端的等效电容c05~c08大小选择20pf,滤除高频杂波;晶振x1两端电阻r01阻值1mω,起到负反馈和限流作用。
45.图5d为复位电路示意图,显示遥控主控模块stm32为低电平复位,因此r07和c14构成上电复位电路,即上电瞬间,c14充电,reset出现短暂的低电平,用来复位mcu主控芯片。低电平持续时间:t=1.1rc=1.1
×
10k
×
1uf=11ms图5e为boot启动电路示意图,下载程序后,重启芯片时,将两boot电平值存储;显示遥控主控模块有三种启动模式由boot[1:0]引脚决定,启动模式,如下表1所示;boot启动电路中,boot0和boot1通过电阻与gnd相连,boot0和boot1电平都置为0,用于用户闪存存储器,是显示遥控主控模块的内置的flash,重启时直接通过flash启动程序。
[0046]
表1boot启动模式图5f为swd调试电路示意图,用于完成程序下载调试;选择swd调试节约io数量且更加可靠;完成测试功能后对设计完成、制作、焊接后的pcb板进行程序烧录,swd调试接口说明如表2所示。
[0047]
表2st-link调试下载器swd调试接口说明下面对显示遥控主控模块连接的外围电路进行介绍:显示模块、电源模块、无线传输模块、按键模块及指示灯模块;其中电源模块选择9v800mah锂离子充电电池,用于对显示遥控主控模块和外围电路进行供电;显示模块选择1.54寸分辨率240
×
240的lcd显示屏;其工作电压3.3v,工作温
度-20
°
c~70
°
c,满足工作需求,高清ips彩色屏,色泽比普通tftlcd更鲜艳,显示区域满足全部采集信息且不同信息区别显示,显示模块lcd显示屏作为外接电路,选择直插接口方式;显示模块用于实时显示喷射控制系统传感器采集的传感器信号等。
[0048]
无线传输模块选择亿百特e32-433t20dc1b型号lora无线模块433mhz,通信距离3km,通信接口uart,工作温度-40
°
c~85
°
c,能够在高、低温环境正常工作,内嵌高速低功耗空中唤醒lora扩频模块sx1278,发射功率100mw,封装形式直插,高效编码设计提高抗干扰和灵敏度;搭配tx433-jz-5胶棒全向天线,直式,频段433mhz,接口sma-j,50mm尺寸,频段满足要求,尺寸尽可能短,节省空间;无线传输模块用于在显示遥控系统与喷射控制系统之间进行信息传递,采用无线传输模块可以通过串口来进行无线通信远程控制,大大降低无线通信的开发,缩短研发周期,有效减少实际设备布线繁琐及实际通信距离和设备局限;遥控按键及指示灯模块,需配置四个按键及对应指示灯,按键key0-key3和指示灯led1-led4,配置接口为pb0-pb11;按动按键key0,led1亮,显示遥控主控模块向喷射控制主控模块发送打开指令;按动key1,led2亮,显示遥控主控模块向喷射控制主控模块发送高速喷射指令;按动key2,led3亮,显示遥控主控模块向喷射控制主控模块发送关闭指令;按动key2,led3亮,显示遥控主控模块向喷射控制主控模块;发送最适流量喷射指令。
[0049]
喷射控制系统主要完成接收显示遥控系统的喷射控制命令的信号执行,驱动隔膜泵直流电机控制除冰剂喷射,完成除冰目的,同时传感器模块实现信息采集、处理和传输,最终显示在显示遥控系统显示模块上。
[0050]
如图6所示,喷射控制系统包括喷射控制主控模块及其外围电路;喷射控制主控模块选择stm32f103c8t6芯片;外围电路包括:电源模块(9v主控模块电源和12v外围电路电源)、无线传输模块、传感器模块(激光测距传感器、双温度传感器、液位传感器和霍尔流量传感器)。
[0051]
喷射控制系统的电源模块中,9v主控模块电源选择9v 800mah锂离子充电电池,12v外围电路电源选择2200mah-20c-3s-11.1v锂电池(xt60接口);喷射控制系统的无线传输模块采用亿百特e32-433t20dc1b型号lora无线模块,连接于喷射控制主控模块的pa8-pa10接口;无线传输模块用于在显示遥控系统与喷射控制系统之间进行信息传递;激光测距传感器采用北醒tfmini plus激光测距传感器,连接于喷射控制主控模块的pb6、pb7接口;激光测距传感器用于检测喷射控制装置与风电机组叶片的距离,传递信号给喷射控制主控模块,喷射控制主控模块通过无线传输模块传递给喷射控制系统;以便操作人员掌握距离信息及时进行操作;激光测距传感器可以设置不同的个数,如图7所示,第一种实施方式激光测距传感器为一个,其设置于控制室8的侧壁上,方向与喷头11正对。
[0052]
风电机组叶片为斜面结构,为了在进行高压喷射时使喷头11与风电机组叶片正对,作为上述激光测距传感器实施方式的替代方案,激光测距传感器为两个,其设置于控制室8的侧壁上且位于喷头11的左右两侧;两个激光测距传感器与喷头11三者共平面;在进行除冰剂喷洒时,另个激光测距传感器,通过喷射控制主控模块、无线传输模块传递给喷射控制系统的显示模块上;然后通过遥控器对无人机组件1进行方位调节;当两个激光测距传感器检测到数值接近时,代表喷头11与风电机组叶片垂直正对。
[0053]
液位传感器选择xkc-y25-v非接触式液位传感器,液位传感器连接于喷射控制主控模块的pa5接口;其设置于除冰剂室7内部的侧壁上,适用于非金属容器外壁而无需与液
体直接接触,容器壁厚20mm内液体均可感应检测;通过贴在容器外壁进行检测,外观小巧,安装方便,不受液体腐蚀或其他杂物影响;支持高低电平输出,供电电压5v,检测到液体输出5v电压信号,没有检测到液体输出0v电压信号,电压信号变化传喷射控制主控模块;控制水泵关停等操作,可实现低液位水泵保护功能。
[0054]
霍尔流量传感器选择dn15(yf-s201流量传感器),用于检测喷射除冰剂的流量,霍尔流量计连接于喷射控制主控模块的pa0接口;其实设置于除冰管路10上,且位于隔膜泵12与喷头11之间;双温度传感器选择不锈钢封装防水型ds18b20数字温度传感器,连接于喷射控制主控模块的pa11、pa12接口上;双温度传感器设置于除冰剂室7内部,目的是检测多位置得到除冰剂的温度。
[0055]
隔膜泵12通过驱动控制模块连接于喷射控制主控模块;图9为驱动控制模块电路示意图;隔膜泵12电机正极与驱动控制模块输出out+(12v电源模块正极)连接,负极与out-(双mos管的d漏极)连接,构成电路回路,通过输出不同pwm占空比控制驱动控制模块的通断控制隔膜泵12电机的电压,从而改变隔膜泵12的输出流速;如图10-11所示,除冰控制作业中,霍尔流量传感器将采集到的喷射控制实际流量与流量给定值的差值,经过pid控制器的离散式pid控制算法运算处理,输出pwm信号,经调压模块处理输出电压控制隔膜泵12以不同转速动作,得到除冰剂实际流量,经流量传感器采集,将实时流量信号与流量给定值信号进行比较,实现流量负反馈闭环控制自动调节。
[0056]
喷射控制主控模块是控制系统的控制器,调压模块是控制系统的执行器,隔膜泵12是被控对象,霍尔流量传感器是测量装置;预设最佳流量作为目标流量值给定,并在输出pwm占空比下驱动隔膜泵12电机动作,霍尔流量传感器采集实时流量并将实际流量值反馈,闭环负反馈控制系统下得到给定流量与实际流量的差值,按照pid控制器整定的参数完成离散式pid控制,判断偏差允许范围内细微调整pwm占空比调节流量,保证系统处于负反馈稳定运行状态,实现流量精准控制。
[0057]
本发明的第二方面提供了一种除冰方法,包括以下步骤:1.利用遥控器,对发送遥控信号给无人机组件1,驱动无人机组件起飞,靠近风电机组叶片;2.激光测距传感器检测本装置与风电机组叶片的距离信号,双温度传感器检测的除冰剂温度信号;通过电信号传递给喷射控制主控模块,喷射控制主控模块通过无线传输模块传递给显示遥控系统的显示模块;利用遥控器发送遥控信号给无人机组件1,对位置进行微调;3.按动按键key0,led1亮,显示遥控主控模块通过无线传输模块向喷射控制主控模块发送打开指令信号;按动key2,led3亮,显示遥控主控模块向喷射控制主控模块;发送最适流量喷射指令信号;喷射控制主控模块控制隔膜泵12工作,将除冰剂通过除冰管路10、喷头11喷洒在风电机组叶片上;4.霍尔流量传感器,将除冰管路10内的实时流量信号传递给喷射控制主控模块,喷射控制主控模块将实时流量信号与流量给定值信号进行比较,经过pid控制器输出pwm信号;进行流量负反馈闭环控制自动调节,保持喷洒稳定;5.按动key1,led2亮,显示遥控主控模块向喷射控制主控模块发送高速喷射指令,喷射控制主控模块控制隔膜泵12工作,将除冰剂通过除冰管路10、喷头11喷洒在风电机组
高速叶片上;6.冰除尽后,按动key2,led3亮,显示遥控主控模块向喷射控制主控模块发送关闭指令;喷射控制主控模块控制隔膜泵12停止。上述中如未单独介绍其固定方式,皆使用业内技术人员通用技术手段,焊接,嵌套,或螺纹固定等方式。
[0058]
以上所述的本发明实施方式,并不构成对本发明保护范围的限定。任何在本发明的精神和原则之内所作的修改、等同替换和改进等,均应包含在本发明的权利要求保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1