一种救援避障无人机的制作方法
本发明属于无人机,具体涉及一种救援避障无人机。
背景技术:
1、无人机是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作,与有人驾驶飞机相比,无人机往往更适合那些太“愚钝,肮脏或危险”的任务;民用方面,在航拍、农业、植保、微型自拍、快递运输、灾难救援、观察野生动物、监控传染病、测绘、新闻报道、电力巡检、救灾、影视拍摄、制造浪漫等等领域的应用,大大的拓展了无人机本身的用途,其中,在救援活动中,无人机的使用也更利于施展救援工作。
2、现有技术存在的问题:
3、当因为自然灾害导致人员受困时,而志愿者由于道路受阻等其他特殊情况无法及时将应急生活物资送到受困人员手中时,投送物资的过程同样变得十分困难;
4、在上述情况发生时,可利用无人机代替人工运送物资,但是传统无人机在携带物资飞行的过程中,会出现以下问题;一:当无人飞至受困人员附近时,由于附近建筑的空间限制以及阻碍,导致无人机无法移动到足够接近受困人员的位置,此时,受困人员同样无法及时获取物资;二:无人机携带物资飞行的过程中,当物资与无人机之间过分绑定时,在出现上述问题一中的情形,受困人员无法直接或快速解掉装有物资的包装袋,而当物资与无人机之间绑定程度较松时,在无人机飞行的过程中,物资很有可能意外掉落,因此此处急需一种专门用于投送紧急物资且方便受困人员拿取物资的无人机。
技术实现思路
1、本发明的目的是提供一种救援避障无人机,能够稳定运输物资并可避免物料脱落,且能在受限的空间下使受困者轻易获取物资,降低空间限制对救援活动的影响,另外,还可在意外撞击发生时,使螺旋桨远离障碍物,并借助气流对障碍物的反推力,使机体快速地且自动地远离障碍物。
2、本发明采取的技术方案具体如下:
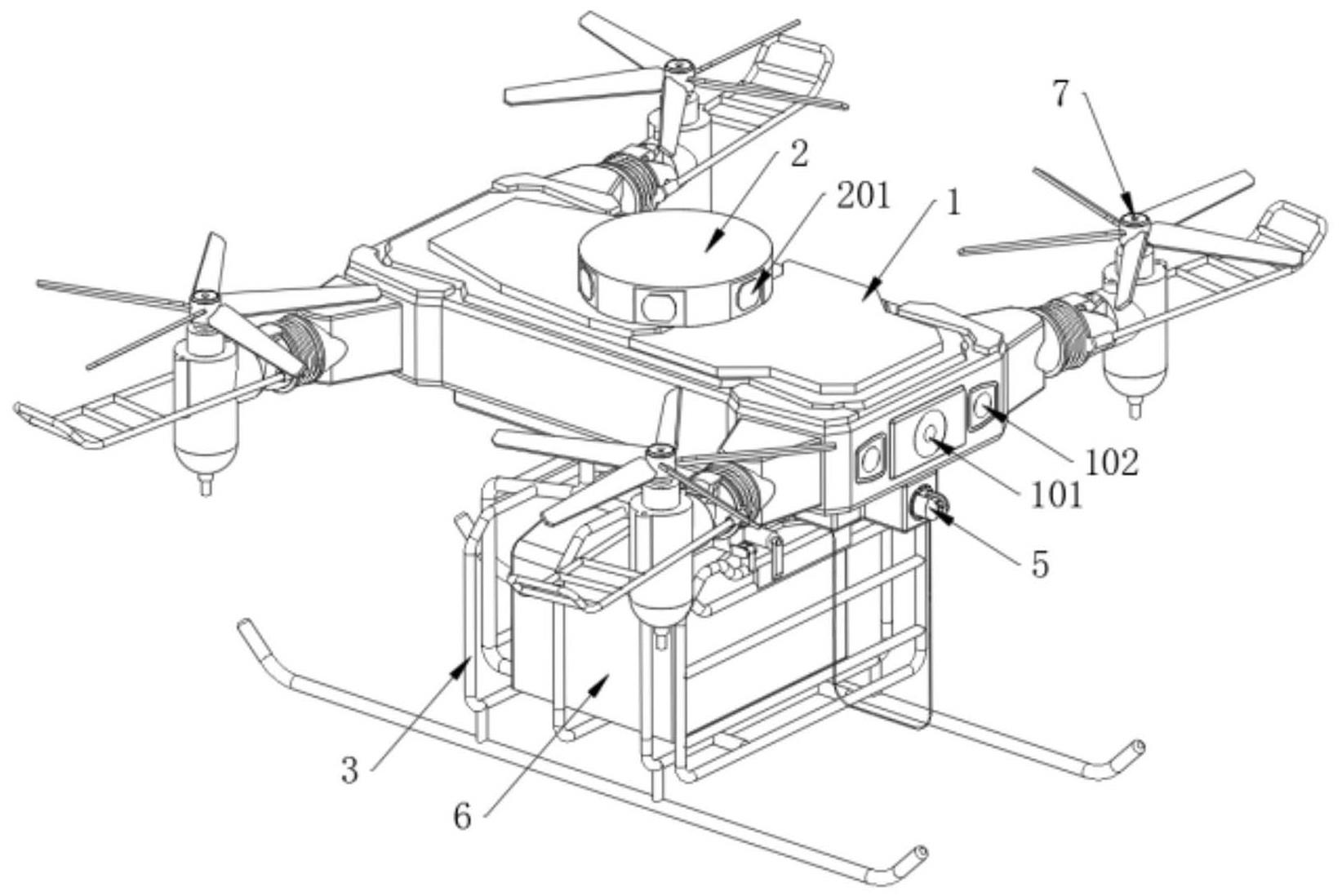
3、一种救援避障无人机,包括无人机体以及装有救援物资的物料袋,所述无人机体的四角对称安装有用于实现飞行的自防护机翼,所述无人机体的上表面安装有用于避开障碍的避障机壳,所述无人机体的下表面安装有用于携带物料袋的物料框,所述无人机体的下表面一端安装有用于辅助受困人员拿取物料袋的绑带端弹出器;
4、所述物料框包括固定安装在无人机体下表面的主框体,所述主框体靠近绑带端弹出器的一端通过设置的铰接体铰接有框门,所述主框体的顶部中间固定焊接有导杆,且所述导杆末端与框门之间存在间隙;
5、所述物料袋的顶部连接有把手带,且所述把手带通过绑带进行捆扎;
6、所述物料框的顶部活动安装有用于辅助运输物料袋的自解送料件,所述自解送料件包括两端设有通孔的导送壳,且所述导送壳通过导杆贯穿通孔的方式与所述导杆活动安装,所述把手带挂装式套装在导送壳的外表面,所述导送壳的内部转动安装有轮轴,且所述轮轴两端并且位于通孔内部固定安装有贴杆轮,所述贴杆轮与所述导杆的外表面相贴合,所述轮轴的中间外表面固定安装有尖齿轮;
7、所述导送壳的一侧转动安装有转架,所述转架的顶端两侧一体式固定连接有槽板,且一个所述槽板的外壁固定安装有气缸一,所述气缸一的输出端伸缩杆贯穿两个所述槽板的顶端,且所述绑带绕过伸缩杆的表面,所述转架的另一端设置有用于与尖齿轮相啮合的尖齿段,所述导送壳与槽板同一侧的外壁固定设置有尾板,所述转架外壁与所述尾板内壁之间连接有曲弹簧。
8、所述绑带端弹出器包括呈t字形的弹出壳体,所述弹出壳体的内部一端固定安装有弹腔壳,所述弹腔壳内部活动插入有外壁设置有导块的击出壳,且所述弹腔壳内壁开设有供导块移动的导槽,所述击出壳内壁与所述弹腔壳内壁之间连接有用于弹出击出壳的击出弹簧,所述击出壳的外端内部活动嵌入有击发块,且所述击发块一端连接有贯穿击出壳与弹腔壳的连接线;
9、所述击发块的另一端内部两侧对称固定设置有内置板,且所述内置板的外壁包裹有海绵球块,两个所述内置板内侧滑动组装有外壁设置有直导块的夹带件,且所述内置板的内壁开设有供直导块移动的直导槽,所述绑带的末端夹合在所述夹带件内壁设置的夹带槽内部,所述内置板的内壁一端对称式固定设置有拨开片,且所述拨开片插入所述夹带件开口端的内部。
10、所述无人机体的一端中间固定安装有用于拍摄的摄像头,且所述无人机体内部并位于摄像头的两侧安装有探照灯。
11、所述避障机壳的内部边缘环形阵列式固定安装有红外测距仪,且所述红外测距仪用于实时监测无人机与周围障碍物之间的距离。
12、所述主框体的底部两侧一体式固定设置有用于支撑该无人机的底撑杆,所述主框体顶部并靠近框门的一侧固定安装有电机一,且所述电机一的输出端固定安装有用于挡住框门的挡门板。
13、其中一个所述内部活动安装有锁块以及用于顶出锁块的内弹簧,所述锁块末端活动插入所述弹腔壳一端开设的定位孔内,且所述弹腔壳外壁固定安装有用于将锁块顶出定位孔的气缸二。
14、所述夹带件开口端的内壁均设置为斜面一,两个所述拨开片相背离的一面均设置有与斜面一相贴合的斜面二。
15、所述弹出壳体内部的另外两端对称固定安装有电机二,且两个电机二的输出端共同连接有输出轴,所述输出轴的外部套设有卷线轮,所述连接线的另一端缠绕连接在所述卷线轮的外表面,所述卷线轮的中部内表面固定设置有单斜面齿环,所述输出轴的中部外表面等距转动安装有单斜面齿。
16、所述自防护机翼包括固定设置在所述无人机体四角的机翼臂,且所述机翼臂的末端两侧对称设置有耳片,且所述耳片的内部圆心处固定设置有插杆,所述机翼臂中部外表面固定设置有挡环,所述机翼臂末端外表面活动套设有套环,且所述套环与所述挡环之间设置有弹簧。
17、所述机翼臂的末端转动安装有旋桨机,且所述旋桨机的输出端顶部固定安装有螺旋桨,所述旋桨机的侧壁设置有两个与耳片构成转动连接的内转体,所述内转体外壁设置有供插杆插入的转接管,且所述转接管外壁与所述耳片内壁之间连接有卷簧。
18、所述套环顶部侧壁设置有与内转体贴合并用于限制旋桨机转动的限转挡块,所述套环的两侧壁均固定设置有接管,所述机翼臂末端可拆卸式安装有用于保护螺旋桨的防护架,且所述防护架的末端插入接管的内部。
19、本发明取得的技术效果为:
20、(1)本发明,将救援需要的物资放入物料袋内,并通过绑带将把手带进行捆扎,便于后续受困人员通过拉扯绑带得到救援物资;另外,物料框与自解送料件的组合设置,主要用于实现物资的运输,使该无人机可专门应用于物资的运送以及救援工作;主框体的设置用于在无人机运输物料袋时,防止物料袋意外与从无人机上脱落,避免物料袋坠落造成物料浪费或者砸伤附近人员。
21、(2)本发明,当受困者拿到绑带并拉扯时,轮轴便可旋转,而贴杆轮可贴合导杆而滚动,最终,物料袋便可在拉力的作用下将推开框门并从主框体的内部被拉出,上述过程,通过将物料袋悬空挂在导送壳上的方式,可降低物料袋在主框体内部移动时的阻力,便于物料袋轻松地从主框体内部取出,方便受困人员快速得到物资;另外,在无人机运输物料袋的过程中,导送壳可凭借固定状态的贴杆轮与导杆之间的摩擦力稳稳地固定在导杆的一端,且只有当受困者拉扯绑带时,方可解除导送壳的固定状态,并使其在拉力的作用下带动物料袋一同移动,因此,自解送料件的设置不仅可将物料袋稳固在物料框内部,还可在拉力作用下自动解除固定状态并运输物料袋。
22、(3)本发明,控制该无人机移动到指定位置时,并使绑带端弹出器正对受困者的位置,接着,启动气缸二,并在击出弹簧的弹力下,击出壳将迅速从弹腔壳内部弹出,而击发块将直接从击出壳内部脱离并飞向受困者,击发块飞行过程中,将连同被夹住的绑带末端一同被弹至受困者身边;此过程,通过将绑带末端弹送至受困者,可方便受困者通过拉扯绑带获取急救物资,并且此方式不需要控制无人机十分靠近受困者,解决由于空间限制和阻碍影响受困者取得急救物资的问题,更方便该无人机在不同空间环境下的救援工作。
23、(4)本发明,待连接线被拉出至极限时,击发块停止继续移动,而在惯性的作用下,夹带件将与击发块之间做相对移动,而拨开片便会深入夹带件的开口端并打开夹带件,此时,绑带便会与夹带件分离,便于受困者直接拿取绑带,此利用惯性自动松开绑带的方式,可使受困者更加直接的获取绑带,另外,受困者也可直接拉扯绑带使绑带与夹带件分离。
24、(5)本发明,当受困者拉着绑带导致无人机意外撞向附近的障碍物,防护架会代替螺旋桨优先与障碍物之间发生撞击,而防护架会连同套环一同移动并挤压弹簧,起到保护螺旋桨的效果,另外,弹簧的设置用于吸收撞击产生的冲击力,实现缓冲的效果,降低撞击带来的损伤程度。
25、(6)本发明,当套环连同限转挡块发生移动后,在卷簧的作用下,插杆与转接管之间会发生相对旋转,此时,旋桨机将连同螺旋桨同时朝靠近机翼臂的方向倾斜旋转,因此在撞击发生时,对应的螺旋桨将会向无人机体靠近,用于增加螺旋桨与障碍物之间的距离,进一步提高螺旋桨的保护效果;另外,发生倾斜旋转的螺旋桨,其旋转产生的推力的方向也将发生变化,且推力倾斜靠近障碍物,借助气流对障碍物的反推力,使机体撞击发生的部位可以更快速地且自动地远离障碍物,优化无人机的防撞保护能力。
- 还没有人留言评论。精彩留言会获得点赞!