一种无人机抓紧机构的制作方法
1.本实用新型属于无人机技术领域,具体涉及一种无人机抓紧机构。
背景技术:
2.随着无人机技术逐渐成熟,制造成本和进入门槛降低,消费级无人机逐步开始应用于实践场景。但是目前无人机的飞行半径和飞行时间都受续航的影响,无法对远距离进行巡航,实际中为解决此问题往往会将无人机固定在无人机场内通过移动运载工具将其带到指定位置进行放飞,在这个过程中无人机场需要对无人机进行抓紧固定,防止无人机在运输过程中发生碰撞造成损坏,那么抓紧机构就显得很重要了。现有无人机降落在平台后抓紧机构采用水平面两个对称方向的推杆来强行将其推往停机平台的中心并夹紧,但无法有效固定其竖直方向,在机场运输过程中,如果机场出现大幅晃动,无人机则可能会出现翻滚,发生碰撞造成损坏。
技术实现要素:
3.本实用新型的目的在于克服上述现有技术的不足,提供了一种无人机抓紧机构,解决现有抓紧机构无法有效固定其竖直方向,出现大幅晃动容易造成翻滚,容易发生碰撞造成损坏的问题。
4.为了解决技术问题,本实用新型的技术方案是:一种无人机抓紧机构,包括传动机构组件和驱动机构组件;
5.所述传动机构组件包括机构安装板、卡爪、卡爪轴和同步带,其中卡爪、卡爪轴和同步带均为两个,两个卡爪轴分别限位于机构安装板长度方向两端,两个卡爪分别固定在两个卡爪轴上,并且两个卡爪呈中心对称设置;
6.所述驱动机构组件包括减速电机、驱动主动轮、第一从动轮组件和第二从动轮组件,减速电机固定于机构安装板长度方向的一侧边,减速电机的动力输出端连接驱动主动轮,驱动主动轮与第一从动轮组件啮合,第一从动轮组件与第二从动轮组件啮合,所述驱动主动轮、第一从动轮组件和第二从动轮组件处于同一水平线上,第一从动轮组件和第二从动轮组件分别与其靠近的卡爪轴通过同步带连接,使减速电机带动两个卡爪同时向内或者向外旋转。
7.优选的,所述机构安装板为两端开口的长方体结构,机构安装板的上端面和下端面均开设有安装孔,机构安装板内壁对应安装孔处焊接有焊接螺母,所述驱动机构组件设置于机构安装板的左侧边中间位置。
8.优选的,所述机构安装板长度方向的两端分别设置有两个与卡爪轴等直径的销孔,卡爪轴两端分别与销孔间隙配合,并且卡爪轴两端与机构安装板之间设置有第一开口挡圈,用于防止卡爪轴轴向移动,所述卡爪通过螺钉固定于卡爪轴上,所述卡爪轴还套接并固定有第一同步轮,第一同步轮通过同步带与第一从动轮组件或第二从动轮组件连接,第一从动轮组件或第二从动轮组件在减速电机的带动下驱动卡爪、卡爪轴和第一同步轮整体
向内或者向外旋转。
9.优选的,所述卡爪为爪型结构,卡爪的抓取侧伸出机构安装板,卡爪的尾部伸入机构安装板内侧,所述机构安装板上设置有漫反射传感器,漫反射传感器通过感器固定螺母固定在机构安装板一侧,所述漫反射传感器为两个,其中一个漫反射传感器与卡爪处于水平时卡爪尾部的位置相对应,另一个漫反射传感器与卡爪处于竖直时卡爪尾部的位置相对应。
10.优选的,所述减速电机通过沉头螺钉固定在驱动机构安装板一端面,驱动主动轮通过内六角平端紧定螺钉固定在减速电机的输出轴上并设置于驱动机构安装板的另一端面,所述第一从动轮组件和第二从动轮组件与驱动主动轮设置于驱动机构安装板同侧并处于同一水平线上,所述驱动机构安装板通过内六角圆柱头螺钉固定于机构安装板长度方向一侧边中间位置,其中减速电机设置于机构安装板外侧,驱动主动轮、第一从动轮组件和第二从动轮组件设置于机构安装板内侧。
11.优选的,所述第一从动轮组件和第二从动轮组件均包括从动轮、第二同步轮、深沟球轴承、齿轮轴和第二开口挡圈,其中深沟球轴承为两个,两个深沟球轴承的内圈分别套装在齿轮轴两端,从动轮和第二同步轮套装并固定在齿轮轴中间位置,其中第一从动轮组件的第二同步轮一侧与驱动主动轮啮合,第一从动轮组件的第二同步轮另一侧与第二从动轮组件的第二同步轮啮合,驱动主动轮、第一从动轮组件的第二同步轮和第二从动轮组件的第二同步轮处于同一水平线上,所述齿轮轴一端通过深沟球轴承的外圈固定在驱动机构安装板上,齿轮轴另一端通过第二开口挡圈轴向限位。
12.优选的,所述第一从动轮组件靠近机构安装板前端,第二从动轮组件靠近机构安装板后端,第一从动轮组件的第二同步轮通过同步带与机构安装板前端的第一同步轮连接,第二从动轮组件的第二同步轮通过同步带与机构安装板后端的第一同步轮连接。
13.优选的,所述第一同步轮和第二同步轮设置于机构安装板同侧的外部。
14.优选的,所述减速电机为dc24v直流有刷减速电机。
15.与现有技术相比,本实用新型的优点在于:
16.(1)本实用新型公开了一种无人机抓紧机构,利用减速电机带动驱动主动轮,驱动主动轮与其中一个从动轮啮合,从动轮与另一个从动轮啮合,从动轮连接第二同步轮,其中驱动主动轮和两个从动轮水平排列布置,可以完成两个卡爪的同时向内或者向外旋转,卡爪向内旋转后将无人机下方的支撑杆作为杆装来抓取固定,可有效固定无人机的竖直方向,防止无人机翻滚;
17.(2)本实用新型传动机构组件两端配合卡爪轴的销孔孔间距可以根据实际需要适度调整,调整后只需要对应调整同步带的长度即可,这样就可以适用于不同尺寸的无人机,适用范围广;
18.(3)本实用新型机构安装板上设置有两个漫反射传感器,其中一个漫反射传感器与卡爪处于水平时卡爪尾部的位置相对应,另一个漫反射传感器与卡爪处于竖直时卡爪尾部的位置相对应,这样卡爪在旋转过程中可通过漫反射传感器来反馈是否完成90
°
旋转,另外,卡爪为爪型结构,卡爪的抓取侧伸出机构安装板,卡爪的尾部伸入机构安装板内侧,卡爪在旋转过程中可通过机构安装板对卡爪尾部的限位进行机械强制限位。
附图说明
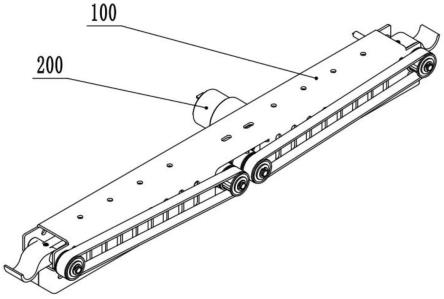
19.图1、本实用新型一种无人机抓紧机构的一侧结构示意图;
20.图2、本实用新型一种无人机抓紧机构的另一侧结构示意图;
21.图3、本实用新型一种无人机抓紧机构的内部结构示意图;
22.图4、本实用新型一种无人机抓紧机构的内部结构示意图;
23.图5、本实用新型一种无人机抓紧机构的驱动机构组件结构示意图。
24.附图标记说明:
25.100、传动机构组件,200、驱动机构组件;
26.101、机构安装板,102、卡爪,103、卡爪轴,104、同步带,105、焊接螺母,106、漫反射传感器,107、感器固定螺母,108、内六角圆柱头螺钉,109、第一同步轮,110、第一开口挡圈;
27.201、减速电机,202、驱动机构安装板,203、驱动主动轮,204、从动轮,205、第二同步轮,206、深沟球轴承,207、齿轮轴,208、第二开口挡圈,209、内六角平端紧定螺钉,210、沉头螺钉。
具体实施方式
28.下面结合实施例描述本实用新型具体实施方式:
29.需要说明的是,本说明书所示意的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本实用新型可实施的限定条件,任何结构的修饰、比例关系的改变或大小的调整,在不影响本实用新型所能产生的功效及所能达成的目的下,均应仍落在本实用新型所揭示的技术内容能涵盖的范围内。
30.同时,本说明书中所引用的如“上”、“下”、“左”、“右”、“中间”及“一”等的用语,亦仅为便于叙述的明了,而非用以限定本实用新型可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本实用新型可实施的范畴。
31.实施例1
32.如图1~5所示,本实用新型公开了一种无人机抓紧机构,包括传动机构组件100和驱动机构组件200;
33.所述传动机构组件100包括机构安装板101、卡爪102、卡爪轴103和同步带104,其中卡爪102、卡爪轴103和同步带104均为两个,两个卡爪轴103分别限位于机构安装板101长度方向两端,两个卡爪102分别固定在两个卡爪轴103上,并且两个卡爪102呈中心对称设置;
34.所述驱动机构组件200包括减速电机201、驱动主动轮203、第一从动轮组件和第二从动轮组件,减速电机201固定于机构安装板101长度方向的一侧边,减速电机201的动力输出端连接驱动主动轮203,驱动主动轮203与第一从动轮组件啮合,第一从动轮组件与第二从动轮组件啮合,所述驱动主动轮203、第一从动轮组件和第二从动轮组件处于同一水平线上,第一从动轮组件和第二从动轮组件分别与其靠近的卡爪轴103通过同步带104连接,使减速电机201带动两个卡爪102同时向内或者向外旋转。
35.所述传动机构组件100的卡爪102呈对称布置,驱动机构组件200作为驱动卡爪102的执行元件。
36.实施例2
37.如图1~3所示,优选的,所述机构安装板101为两端开口的长方体结构,机构安装板101的上端面和下端面均开设有安装孔,机构安装板101内壁对应安装孔处焊接有焊接螺母105,所述驱动机构组件200设置于机构安装板101的左侧边中间位置。
38.所述焊接螺母105是焊接在机构安装板101内侧对应安装孔位置上,用来连接抓紧机构与外部结构。
39.所述机构安装板101的材质为q235a钢板,卡爪102和卡爪轴103材质为45钢,所述焊接螺母105为m5焊接螺母(gb/t 6170)。
40.如图1~3所示,优选的,所述机构安装板101长度方向的两端分别设置有两个与卡爪轴103等直径的销孔,卡爪轴103两端分别与销孔间隙配合,并且卡爪轴103两端与机构安装板101之间设置有第一开口挡圈110,用于防止卡爪轴103轴向移动,所述卡爪102通过螺钉固定于卡爪轴103上,所述卡爪轴103还套接并固定有第一同步轮109,第一同步轮109通过同步带104与第一从动轮组件或第二从动轮组件连接,第一从动轮组件或第二从动轮组件在减速电机201的带动下驱动卡爪102、卡爪轴103和第一同步轮109整体向内或者向外旋转。
41.所述传动机构组件100的机构安装板101两端有与卡爪轴103等直径的销孔,用来与其配合(间隙);卡爪轴103与机构安装板101配合一侧装有第一开口挡圈110用来防止轴向移动,内六角平端紧定螺钉(gb/t 77)将卡爪102固定在卡爪轴103上,置于机构安装板101内侧,卡爪轴103的另一侧通过内六角平端紧定螺钉(gb/t 77)将第一同步轮109固定在卡爪轴103上,这样卡爪102、卡爪轴103以及第一同步轮109可以作为整体转动。
42.所述第一开口挡圈110为d4开口挡圈(gb/t 896),螺钉为m4-6内六角平端紧定螺钉(gb/t 77)。
43.实施例3
44.如图1~3所示,优选的,所述卡爪102为爪型结构,卡爪102的抓取侧伸出机构安装板101,卡爪102的尾部伸入机构安装板101内侧,所述机构安装板101上设置有漫反射传感器106,漫反射传感器106通过感器固定螺母107固定在机构安装板101一侧,所述漫反射传感器106为两个,其中一个漫反射传感器106与卡爪102处于水平时卡爪102尾部的位置相对应,另一个漫反射传感器106与卡爪102处于竖直时卡爪102尾部的位置相对应。
45.一个漫反射传感器106在卡爪102转动至水平方向上布置,另一个漫反射传感器106在卡爪102转动至竖直方向上布置,用传感器固定螺母107来固定,漫反射传感器106可以探测卡爪102是否旋转90
°
。
46.如图1~2所示,机构安装板101靠近卡爪102的边用于限制卡爪102的尾部的位置,作为机械强制限位。
47.实施例4
48.如图4、5所示,优选的,所述减速电机201通过沉头螺钉210固定在驱动机构安装板202一端面,驱动主动轮203通过内六角平端紧定螺钉209固定在减速电机201的输出轴上并设置于驱动机构安装板202的另一端面,所述第一从动轮组件和第二从动轮组件与驱动主动轮203设置于驱动机构安装板202同侧并处于同一水平线上,所述驱动机构安装板202通过内六角圆柱头螺钉108固定于机构安装板101长度方向一侧边中间位置,其中减速电机201设置于机构安装板101外侧,驱动主动轮203、第一从动轮组件和第二从动轮组件设置于
机构安装板101内侧。
49.所述驱动机构组件200的dc24v直流有刷减速电机201通过沉头螺钉210固定在驱动机构安装板202上,驱动主动轮203通过m4-6内六角平端紧定螺钉209将其固定在dc24v直流有刷减速电机201的输出轴上。
50.所述驱动机构安装板202上有4个m4螺纹孔,通过4个内六角圆柱头螺钉108将驱动机构组件200固定在传动机构组件100上,通过两根同步带104分别连接传动机构组件100上的第一同步轮109和驱动机构组件200上的第二同步轮205,由此构成一个完整驱动链,即dc24v直流有刷减速电机201正反转时两根同步带104分别带动两根卡爪轴103完成同时向内或者向外的传动。
51.所述内六角圆柱头螺钉108为内六角圆柱头m4-10螺钉(gb/t 70),内六角平端紧定螺钉209为m4-6内六角平端紧定螺钉(gb/t 77),沉头螺钉210为沉头螺钉m3-6(gb/t 819);所述驱动机构安装板202的材质为q235a钢板,驱动主动轮203的材质为45钢。
52.实施例5
53.如图4、5所示,优选的,所述第一从动轮组件和第二从动轮组件均包括从动轮204、第二同步轮205、深沟球轴承206、齿轮轴207和第二开口挡圈208,其中深沟球轴承206为两个,两个深沟球轴承206的内圈分别套装在齿轮轴207两端,从动轮204和第二同步轮205套装并固定在齿轮轴207中间位置,其中第一从动轮组件的第二同步轮205一侧与驱动主动轮203啮合,第一从动轮组件的第二同步轮205另一侧与第二从动轮组件的第二同步轮205啮合,驱动主动轮203、第一从动轮组件的第二同步轮205和第二从动轮组件的第二同步轮205处于同一水平线上,所述齿轮轴207一端通过深沟球轴承206的外圈固定在驱动机构安装板202上,齿轮轴207另一端通过第二开口挡圈208轴向限位。
54.将4个深沟球轴承206每两个分别与两根齿轮轴207配合固定在驱动机构安装板202上,轴向用第二开口挡圈208来限位,两根齿轮轴207的同一侧轴端上都装有从动轮204和第二同步轮205,并通过内六角平端紧定螺钉将其分别固定在齿轮轴207上并在轴向上用第二开口挡圈208来限位,这样驱动主动轮203和2个从动轮204呈水平布置并构成齿轮传动模式,这样两个紧挨着的第二同步轮205就可以完成同时向内或者向外的传动。
55.所述第二开口挡圈208为d4开口挡圈(gb/t 896),从动轮204的材质为45钢,第二同步轮205的材质为铝合金材质(6061)、齿轮轴207的材质为45钢。
56.如图3~4所示,优选的,所述第一从动轮组件靠近机构安装板101前端,第二从动轮组件靠近机构安装板101后端,第一从动轮组件的第二同步轮205通过同步带104与机构安装板101前端的第一同步轮109连接,第二从动轮组件的第二同步轮205通过同步带104与机构安装板101后端的第一同步轮109连接。
57.如图1所示,优选的,所述第一同步轮109和第二同步轮205设置于机构安装板101同侧的外部,设置于机构安装板101同侧的外部方便更换同步带104。
58.所述减速电机201为dc24v直流有刷减速电机。
59.本实用新型工作原理如下:
60.如图1~5所示,本实用新型提供了一种无人机抓紧机构,由传动机构组件100和驱动机构组件200构成,驱动机构组件200通过驱动驱动主动轮202,带动两个从动轮204,两个从动轮204的第二同步轮205分别通过同步带104连接卡爪轴103上的第一同步轮109,由于
两个从动轮204水平排列布置啮合,可驱动两个第二同步轮205同时向内或者向外旋转,由于卡爪轴103、第一同步轮109和卡爪102固定成为了一个整体,两个第二同步轮205驱动两个卡爪102同时向内或者向外旋转,通过两个卡爪102来抓取无人机的落地支撑杆。
61.本实用新型公开了一种无人机抓紧机构,利用减速电机带动驱动主动轮,驱动主动轮与其中一个从动轮啮合,从动轮与另一个从动轮啮合,从动轮连接第二同步轮,其中驱动主动轮和两个从动轮水平排列布置,可以完成两个卡爪的同时向内或者向外旋转,卡爪向内旋转后将无人机下方的支撑杆作为杆装来抓取固定,可有效固定无人机的竖直方向,防止无人机翻滚。
62.本实用新型传动机构组件两端配合卡爪轴的销孔孔间距可以根据实际需要适度调整,调整后只需要对应调整同步带的长度即可,这样就可以适用于不同尺寸的无人机,适用范围广。
63.本实用新型机构安装板上设置有两个漫反射传感器,其中一个漫反射传感器与卡爪处于水平时卡爪尾部的位置相对应,另一个漫反射传感器与卡爪处于竖直时卡爪尾部的位置相对应,这样卡爪在旋转过程中可通过漫反射传感器来反馈是否完成90
°
旋转,另外,卡爪为爪型结构,卡爪的抓取侧伸出机构安装板,卡爪的尾部伸入机构安装板内侧,卡爪在旋转过程中可通过机构安装板对卡爪尾部的限位进行机械强制限位。
64.上面对本实用新型优选实施方式作了详细说明,但是本实用新型不限于上述实施方式,在本领域普通技术人员所具备的知识范围内,还可以在不脱离本实用新型宗旨的前提下做出各种变化。
65.不脱离本实用新型的构思和范围可以做出许多其他改变和改型。应当理解,本实用新型不限于特定的实施方式,本实用新型的范围由所附权利要求限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1