一种机载激光测量数据采集装置的制作方法
1.本实用新型涉及一种数据采集装置,尤其涉及一种机载激光测量数据采集装置。
背景技术:
2.在利用无人机对周围环境进行数据采集和测量的过程中,受到气流和无人机本身结构的影响,其机身常常会发生不稳定的晃动,而晃动的机身则会使得传感器位置不受控制的改变,而传感器位置不受控制的改变,特别是其角度的频繁不稳定变化,会影响传感器对数据的正常采集,且会增加后期数据处理的工作量,从而降低工作效率,突出了其不足之处。
技术实现要素:
3.本实用新型的目的在于提供一种机载激光测量数据采集装置,以解决上述技术问题。
4.为实现上述目的本实用新型采用以下技术方案:
5.一种机载激光测量数据采集装置,包括上壳体、上支撑板、空心球、红外测距传感器、空心壳体、滚轮、反射板、找平液、采集部分,所述上壳体内部固定有上支撑板,所述上支撑板中部固定有空心球,所述空心球底部圆周等角度固定有四个竖直的红外测距传感器,各所述红外测距传感器的探头处于同一水平面上,所述空心球内部置有空心壳体,所述空心壳体呈圆饼状,且外圆周壁圆周等角度固定有四个水平的滚轮,各所述滚轮在重力的作用下始终与空心球的内壁相接触,所述空心壳体底端固定有反射板,所述空心球内部填充有找平液,各所述红外测距传感器均能够实时测量到反射板之间的垂直距离,所述上壳体下方安装有采集部分。
6.在上述技术方案基础上,所述采集部分包括下壳体、防护罩、支撑环形架、处理器、主减速电机、副减速电机、支撑圆板、一号孔、次减速电机、测量传感器、二号孔、推杆电机,所述上壳体下方安装有下壳体,且底部螺纹连接有防护罩,所述下壳体内部固定有水平的下支撑板,所述下支撑板左部铰接有支撑环形架,且左前部固定有处理器,所述下支撑板右部固定有主减速电机,所述主减速电机的转轴与支撑环形架相固定,所述支撑环形架前部固定有副减速电机,且后部铰接有支撑圆板,所述支撑环形架右后部贯穿有水平的一号孔,所述副减速电机的转轴与支撑圆板相固定,所述支撑圆板顶端中部固定有竖直的次减速电机,所述次减速电机的转轴与支撑圆板相间隙插接,所述次减速电机的转轴底端固定有水平的测量传感器,所述支撑圆板右后部开有水平的二号孔,所述下支撑板右后部固定有水平的推杆电机。
7.在上述技术方案基础上,所述主减速电机通电转动时能够带动支撑环形架前后摆动,所述副减速电机通电转动时能够带动支撑圆板左右摆动,所述次减速电机通电转动时能够带动测量传感器水平周向转动,所述推杆电机伸出推杆时能够与一号孔和二号孔相插接。
8.与现有技术相比,本实用新型具有以下优点:本实用新型在测量的过程中,无人机机身会发生相应的倾斜,处理器会根据红外测量传感器测量到的距离对主减速电机和副减速电机进行相应的控制,从而使得支撑环形架和支撑圆板进行相应的摆动,从而使得支撑圆板也保持水平状态,继而能够方便测量传感器进行稳定的测量。
附图说明
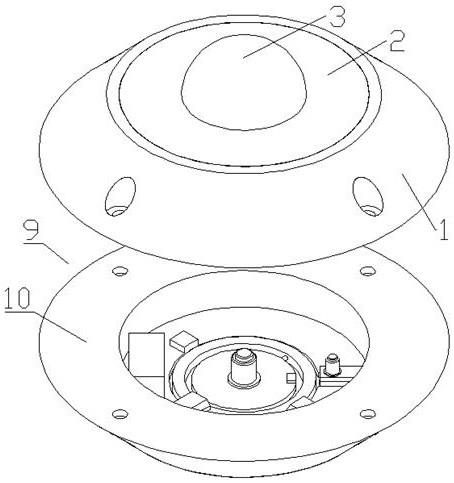
9.图1为本实用新型的结构示意图。
10.图2为本实用新型空心球的前剖结构示意图。
11.图3为本实用新型防护罩的安装示意图。
12.图4为本实用新型下支撑板的底部结构示意图。
13.图中:1、上壳体,2、上支撑板,3、空心球,4、红外测距传感器,5、空心壳体,6、滚轮,7、反射板,8、找平液,9、采集部分,10、下壳体,11、防护罩,12、下支撑板,13、支撑环形架,14、处理器,15、主减速电机,16、副减速电机,17、支撑圆板,18、一号孔,19、次减速电机,20、测量传感器,21、二号孔,22、推杆电机。
具体实施方式
14.下面结合附图和具体实施例对本实用新型作进一步详细阐述。
15.如图1-4所示,一种机载激光测量数据采集装置,包括上壳体1、上支撑板2、空心球3、红外测距传感器4、空心壳体5、滚轮6、反射板7、找平液8、采集部分9,所述上壳体1内部固定有上支撑板2,所述上支撑板2中部固定有空心球3,所述空心球3底部圆周等角度固定有四个竖直的红外测距传感器4,各所述红外测距传感器4的探头处于同一水平面上,所述空心球3内部置有空心壳体5,所述空心壳体5呈圆饼状,且外圆周壁圆周等角度固定有四个水平的滚轮6,各所述滚轮6在重力的作用下始终与空心球3的内壁相接触,所述滚轮6用于方便空心壳体5趋于水平,所述空心壳体5底端固定有反射板7,所述空心球3内部填充有找平液8,所述找平液8用于保证空心壳体5始终保持水平状态,各所述红外测距传感器4均能够实时测量到反射板7之间的垂直距离,所述上壳体1下方安装有采集部分9。
16.所述采集部分9包括下壳体10、防护罩11、支撑环形架13、处理器14、主减速电机15、副减速电机16、支撑圆板17、一号孔18、次减速电机19、测量传感器20、二号孔21、推杆电机22,所述上壳体1下方安装有下壳体10,且底部螺纹连接有防护罩11,所述保护罩11用于在闲置时对下壳体10内的部件进行良好的保护,所述下壳体10内部固定有水平的下支撑板12,所述下支撑板12左部铰接有支撑环形架13,且左前部固定有处理器14,所述下支撑板12右部固定有主减速电机15,所述主减速电机15的转轴与支撑环形架13相固定,所述支撑环形架13前部固定有副减速电机16,且后部铰接有支撑圆板17,所述支撑环形架13右后部贯穿有水平的一号孔18,所述副减速电机16的转轴与支撑圆板17相固定,所述支撑圆板17顶端中部固定有竖直的次减速电机19,所述次减速电机19的转轴与支撑圆板17相间隙插接,所述次减速电机19的转轴底端固定有水平的测量传感器20,所述支撑圆板17右后部开有水平的二号孔21,所述下支撑板12右后部固定有水平的推杆电机22。
17.所述主减速电机15通电转动时能够带动支撑环形架13前后摆动,所述副减速电机16通电转动时能够带动支撑圆板17左右摆动,所述次减速电机19通电转动时能够带动测量
传感器20水平周向转动,所述推杆电机22伸出推杆时能够与一号孔18和二号孔21相插接,从而在闲置时能够对支撑环形架13和支撑圆板17进行限定,防止其意外移动。
18.本实用新型的工作原理:将上壳体1安装在无人机顶端,将下壳体10安装在无人机底端,初始时推杆电机22的推杆与一号孔18和二号孔21相插接,使用时先卸下防护罩11,随后控制无人机起飞并低空悬停,此时空心壳体5受到重力和浮力的作用及保持水平状态,此时各测量传感器20测量到反射板7的距离相同,随后控制推杆电机22缩回推杆,即可利用测量传感器20进行正常的测量工作,在无人机进行测量的过程中,无人机机身会发生相应的倾斜,此时空心壳体5在重力和浮力的作用下始终会保持水平状态,而此时各测量传感器20测量到反射板7的距离不尽相同,此时处理器14会根据测量到的距离对主减速电机15和副减速电机16进行相应的控制,从而使得支撑环形架13和支撑圆板17进行相应的转动,从而使得支撑圆板17也保持水平状态,继而能够方便测量传感器20进行稳定的测量,待测量完成后,重新控制无人机悬停,此时支撑环形架13和支撑圆板17即复位,然后控制推杆电机22重新伸出推杆即可对支撑环形架13和支撑圆板17的位置进行限定,从而能够方便下次进行测量工作。
19.以上所述为本实用新型较佳实施例,对于本领域的普通技术人员而言,根据本实用新型的教导,在不脱离本实用新型的原理与精神的情况下,对实施方式所进行的改变、修改、替换和变型仍落入本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1