一种双旋翼室内巡检无人机的制作方法
1.本实用新型涉及无人机技术领域,具体涉及一种双旋翼室内巡检无人机。
背景技术:
2.随着互联网购物的兴起,大型仓储库的数量快速增长起来,与之增长的是仓储的安全、管理、物品清点、消防问题。在仓储巡检机器人的使用过程中,现有电动传送带的仓储机器人以地面轨道和倒挂式轨道进行运作,其运行的轨迹固定,行动速度较慢、清点物资效率低,及时反馈性差。
技术实现要素:
3.本实用新型的目的是提供一种双旋翼室内巡检无人机,用以解决现有技术中存在的至少一个上述问题。
4.为了实现上述目的,本实用新型采用以下技术方案:
5.一种双旋翼室内巡检无人机,包括无人机本体和设置在无人机本体上的图像采集模块,所述图像采集模块包括用于拍摄室内执行设备的高速相机、用于对室内顶部管道的温度进行测量的红外摄像机和适用于超视距飞行状态拍摄的第一人称视角摄像机;
6.所述无人机本体包括机架和设置在机架下方的起落架,所述机架的中部设有控制箱,所述控制箱的下端设有云台,所述云台为四自由度云台,所述高速相机设置在云台上,所述红外摄像机设置在控制箱的上端,所述第一人称视角摄像机设置在控制箱的正面;
7.所述机架的两端对称设有倾转动力模块,所述倾转动力模块包括舵机、安装座、转动座、电机和螺旋桨,所述安装座设置在机架的端部,所述转动座与安装座转动配合,所述舵机控制转动座的角度变化,所述舵机的输出轴的转动轴线与机架的轴线平行,所述电机设置在转动座上,所述螺旋桨安装在电机的输出轴上,螺旋桨主要使用一对相反的正反桨。
8.本技术方案中,高速相机可用于拍摄货架、机柜等执行设备的状态;红外摄像机可生成机柜温度图像,通过对温度图像进行分析可迅速判断异常发热的机柜、裸露线材等相关设施,并将数据返回至服务器;第一人称视角摄像机适用于超视距飞行状态下的拍摄工作。通过上述图像采集模块更能及时向管理人员传递仓储动态情况。
9.此外,由于机架的两端对称设有倾转动力模块,舵机的输出轴的转动轴线与机架的轴线平行,通过舵机可以调节螺旋桨以舵机的输出轴为中心轴进行平面的偏转,采用水平布局倾转的方式,可以在较为狭窄的范围快速大角度的提升高度,例如,传统无人机只能以较大的钝角缓慢爬升,对于非常狭窄的货架工厂等环境中较高速情形下具有非常大的炸毁危险,本技术方案的设计,相较于普通无人机的爬升角度范围扩大了百分之三十五,可以适合正负一百三十五度以内的倾转飞行,安全程度较高。通过上述倾转动力模块的设计,还可控制无人机的转向,并提升了多种飞行姿势飞行的稳定,使无人机在设定的角度范围内保持平稳的飞行状态,飞行的安全性与可靠性得到提升。
10.本技术方案主要针对以上场景中传统的地面巡检机器人的局限性进行改进和升
级,使用无人机在空中巡检以弥补传统地面巡检机器人巡检速度慢,无法对不同高度的货物进行清点核算,行动路线容易受到场地制约等情况。并且使用无人机巡检,可以做到功能的集成化,缩减无人仓库的建设成本。
11.进一步的,为了提供一种结构稳定可靠,便于组装的倾转动力模块,所述安装座包括舵机安装槽和转动座安装位,所述舵机安装在舵机安装槽内,所述转动座安装位包括相对设置的两个支撑座,所述转动座包括支撑板和设置在支撑板下端的两个连接座,两个连接座相对设置,所述支撑座和连接座上均设有通孔,两个连接座和两个支撑座交叉设置且相应的通孔均水平对齐,所述舵机的输出轴通过转轴与连接座固定连接,所述转轴与支撑座转动配合。
12.进一步的,为了提供一种结构简洁,安全可靠的起落支架,所述起落架包括相对设置的两根起落支架,所述起落支架的下端设有充电触点。具体的,起落支架的下端设有八组充电触点,用于无人机的自动充电。
13.进一步的,为了提供一种结构简洁,安全可靠的起落支架,所述起落支架为倒t形起落架,所述倒t形起落架包括支撑脚和设置在支撑脚上的支撑腿,所述支撑腿的上端与机架靠近其两端的位置固定连接,所述支撑脚的长度方向与机架的长度方向垂直,所述充电触点设置在支撑脚上。
14.进一步的,为了方便给无人机充电,还包括充电座,所述充电座上分别设有与对应的充电触点对接的两个充电接口。
15.进一步的,还包括设置在无人机本体上的控制模块、路径规划模块、通讯模块和传感器组,所述控制模块包括主控芯片和副控芯片,所述主控芯片和副控芯片电连接,所述传感器组包括重力计、角度传感器、磁力计、角速度计、温湿度传感器和红外传感器,所述重力计、角度传感器、磁力计、角速度计、温湿度传感器、红外传感器和红外摄像机均与副控芯片电连接,所述路径规划模块、通讯模块、第一人称视角摄像机、高速相机均与主控芯片电连接,所述主控芯片的输出端分别与舵机、电机和云台的输入端电连接。
16.所述路径规划模块包括激光扫描仪、惯性导航传感器和视觉导航传感器,所述激光扫描仪的输出端、惯性导航传感器的输出端和视觉导航传感器的输出端均与主控芯片电连接。激光扫描仪采用现有的slam技术,无人机可以通过激光扫描仪自主完成外部地图构建,在室内地图全部构建完毕后,无人机可以根据地图构建路径确定行走路线,完成自动巡检,基于视觉slam的室内巡检,无人机能够灵活的按照轨迹路线进行巡检,高效率低成本的清点室内垂直堆叠的货物数量,基于slam视觉的室内巡检,能够实时构建地图及定位。通过实时建立点云图,不仅帮助无人机准确规避突发物障,更能及时向管理人员传递仓储动态情况。
17.slam技术为现有技术,slam技术能够将无人机放入未知环境中,无人机在移动过程中通过该技术能够逐步描绘出当前环境的完整地图,从而实现导航。视觉导航传感器可以选择双目摄像头,视觉导航传感器能够为slam技术提供丰富的前端采集数据。
18.本技术的视频传输方案:可利用机载计算平台安装ffmpeg软件,使用rtmp协议将高清视频推流至服务器,飞行数据使用ftp协议向服务器发送。
19.进一步的,还包括定位模块,所述定位模块与主控芯片电连接。具体的,定位模块可以选择gps模块,gps模块用于实时获取无人机的位置信号,并将位置信号发送至主控芯
片。
20.进一步的,为了检测碰撞信息,还包括设置在无人机主体上的碰撞传感器模组,所述碰撞传感器模组与主控芯片电连接。
21.进一步的,所述通讯模块包括5.8g通讯模块、2.4g通讯模块、5g通讯模块和wifi通讯模块。本无人机提供对2.4g频道和5.8g频道的无线终端接入支持,实现双频无线网络接入设备的作用。同时通过5g通讯模块可实现在无wifi热点的情况下无人机的网络通信。通过wifi模块用于实现主控芯片与服务器之间的数据通讯,对于有wifi热点的室内场景,本无人机支持无线wifi传输协议。
22.进一步的,所述通讯模块连接有信号放大模块,所述信号放大模块连接有天线。
23.本实用新型的有益效果为:本技术方案中,高速相机可用于拍摄货架、机柜等执行设备的状态;红外摄像机可生成机柜温度图像,通过对温度图像进行分析可迅速判断异常发热的机柜、裸露线材等相关设施,并将数据返回至服务器;第一人称视角摄像机适用于超视距飞行状态下的拍摄工作。通过上述图像采集模块更能及时向管理人员传递仓储动态情况。
24.此外,由于机架的两端对称设有倾转动力模块,舵机的输出轴的转动轴线与机架的轴线平行,通过舵机可以调节螺旋桨以舵机的输出轴为中心轴进行平面的偏转,采用水平布局倾转的方式,可以在较为狭窄的范围快速大角度的提升高度,例如,传统无人机只能以较大的钝角缓慢爬升,对于非常狭窄的货架工厂等环境中较高速情形下具有非常大的炸毁危险,本技术方案的设计,相较于普通无人机的爬升角度范围扩大了百分之三十五,可以适合正负一百三十五度以内的倾转飞行,安全程度较高。通过上述倾转动力模块的设计,还可控制无人机的转向,并提升了多种飞行姿势飞行的稳定,使无人机在设定的角度范围内保持平稳的飞行状态,飞行的安全性与可靠性得到提升。
25.本技术方案主要针对以上场景中传统的地面巡检机器人的局限性进行改进和升级,使用无人机在空中巡检以弥补传统地面巡检机器人巡检速度慢,无法对不同高度的货物进行清点核算,行动路线容易受到场地制约等情况。并且使用无人机巡检,可以做到功能的集成化,缩减无人仓库的建设成本。
附图说明
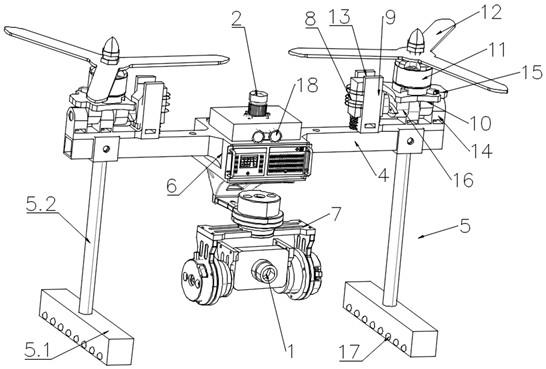
26.图1为本实用新型第一视角的结构示意图;
27.图2为本实用新型第二视角的结构示意图;
28.图3为本实用新型的电路原理框图。
29.图中:高速相机1;红外摄像机2;第一人称视角摄像机3;机架4;起落架5;支撑脚5.1;支撑腿5.2;控制箱6;云台7;舵机8;安装座9;转动座10;电机11;螺旋桨12;舵机安装槽13;支撑座14;支撑板15;连接座16;充电触点17;双目摄像头18。
具体实施方式
30.实施例一:
31.如图1-图3所示,本实施例提供一种双旋翼室内巡检无人机,包括无人机本体和设置在无人机本体上的图像采集模块,图像采集模块包括用于拍摄室内执行设备的高速相机
1、用于对室内顶部管道的温度进行测量的红外摄像机2和适用于超视距飞行状态拍摄的第一人称视角摄像机3;
32.无人机本体包括机架4和设置在机架4下方的起落架5,机架4的中部设有控制箱6,能够保证机身的平稳性,控制箱6的下端设有云台7,云台7为四自由度云台7,高速相机1设置在云台7上,红外摄像机2设置在控制箱6的上端,第一人称视角摄像机3设置在控制箱6的正面;
33.机架4的两端对称设有倾转动力模块,倾转动力模块包括舵机8、安装座9、转动座10、电机11和螺旋桨12,安装座9设置在机架4的端部,转动座10与安装座9转动配合,舵机8控制转动座10的角度变化,舵机8的输出轴的转动轴线与机架4的轴线平行,电机11设置在转动座10上,螺旋桨12安装在电机11的输出轴上,本无人机的螺旋桨12主要使用一对相反的正反桨。
34.本技术方案中,高速相机1可用于拍摄货架、机柜等执行设备的状态;红外摄像机2可对室内顶部管道的温度进行测量,生成机柜温度图像,通过对温度图像进行分析可迅速判断异常发热的机柜、裸露线材等相关设施,并将数据返回至服务器;第一人称视角摄像机3适用于超视距飞行状态下的拍摄工作。通过上述图像采集模块更能及时向管理人员传递仓储动态情况。
35.此外,由于机架4的两端对称设有倾转动力模块,舵机8的输出轴的转动轴线与机架4的轴线平行,通过舵机8可以调节螺旋桨12以舵机8的输出轴为中心轴进行平面的偏转,采用水平布局倾转的方式,可以在较为狭窄的范围快速大角度的提升高度,例如,传统无人机只能以较大的钝角缓慢爬升,对于非常狭窄的货架工厂等环境中较高速情形下具有非常大的炸毁危险,本技术方案的设计,相较于普通无人机的爬升角度范围扩大了百分之三十五,可以适合正负一百三十五度以内的倾转飞行,安全程度较高。通过上述倾转动力模块的设计,还可控制无人机的转向,并提升了多种飞行姿势飞行的稳定,使无人机在设定的角度范围内保持平稳的飞行状态,飞行的安全性与可靠性得到提升。
36.本技术方案主要针对以上场景中传统的地面巡检机器人的局限性进行改进和升级,使用无人机在空中巡检以弥补传统地面巡检机器人巡检速度慢,无法对不同高度的货物进行清点核算,行动路线容易受到场地制约等情况。并且使用无人机巡检,可以做到功能的集成化,缩减无人仓库的建设成本。
37.实施例二:
38.本实施例是在上述实施例一的基础上进行优化。
39.为了提供一种结构稳定可靠,便于组装的倾转动力模块,安装座9包括舵机安装槽13和转动座安装位,舵机8安装在舵机安装槽13内,转动座安装位包括相对设置的两个支撑座14,转动座10包括支撑板15和设置在支撑板15下端的两个连接座16,两个连接座16相对设置,支撑座14和连接座16上均设有通孔,两个连接座16和两个支撑座14交叉设置且相应的通孔均水平对齐,舵机8的输出轴通过转轴与连接座16固定连接,转轴与支撑座14转动配合。
40.实施例三:
41.本实施例是在上述实施例一的基础上进行优化。
42.为了提供一种结构简洁,安全可靠的起落支架5,起落架5包括相对设置的两根起
落支架,起落支架的下端设有充电触点17。具体的,起落支架的下端设有八组充电触点17,用于无人机的自动充电。
43.实施例四:
44.本实施例是在上述实施例三的基础上进行优化。
45.为了提供一种结构简洁,安全可靠的起落支架,起落支架为倒t形起落架,倒t形起落架包括支撑脚5.1和设置在支撑脚5.1上的支撑腿5.2,支撑腿5.2的上端与机架4靠近其两端的位置固定连接,支撑脚5.1的长度方向与机架4的长度方向垂直,充电触点17设置在支撑脚5.1上。
46.实施例五:
47.本实施例是在上述实施例四的基础上进行优化。
48.为了方便给无人机充电,还包括充电座,充电座上分别设有与对应的充电触点17对接的两个充电接口。
49.实施例六:
50.本实施例是在上述实施例一的基础上进行优化。
51.还包括设置在无人机本体上的控制模块、路径规划模块、通讯模块和传感器组,控制模块包括主控芯片和副控芯片,主控芯片和副控芯片电连接,传感器组包括重力计、角度传感器、磁力计、角速度计、温湿度传感器和红外传感器,重力计、角度传感器、磁力计、角速度计、温湿度传感器、红外传感器和红外摄像机2均与副控芯片电连接,本无人机上还设有九轴陀螺仪模块,九轴陀螺仪模块与副控芯片电连接,路径规划模块、通讯模块、第一人称视角摄像机3、高速相机1均与主控芯片电连接,主控芯片的输出端分别与舵机8、电机11和云台7的输入端电连接。
52.路径规划模块包括激光扫描仪、惯性导航传感器和视觉导航传感器,激光扫描仪、惯性导航传感器和视觉导航传感器的输出端均与主控芯片电连接。
53.激光扫描仪采用现有的slam技术,可以通过激光扫描仪自主完成无人机周围环境地图的构建,在无人机的位姿发生改变时,利用惯性导航传感器用于辅助确定无人机的精确位置,计算无人机在地图中的最佳位姿,在室内地图全部构建完毕后,根据完成的地图构建路径确定行走路线,完成自动巡检。
54.基于视觉slam的室内巡检,无人机能够灵活的按照轨迹路线进行巡检,高效率低成本的清点室内垂直堆叠的货物数量,基于slam视觉的室内巡检,能够实时构建地图及定位。通过实时建立点云图,不仅帮助无人机准确规避突发物障,更能及时向管理人员传递仓储动态情况。
55.slam技术为现有技术,slam技术能够将无人机放入未知环境中,无人机在移动过程中通过该技术能够逐步描绘出当前环境的完整地图,从而实现导航。视觉导航传感器可以选择双目摄像头18,视觉导航传感器能够为slam技术提供丰富的前端采集数据。
56.本技术的视频传输方案:可利用机载计算平台安装ffmpeg软件,使用rtmp协议将高清视频推流至服务器,飞行数据使用ftp协议向服务器发送。
57.实施例七:
58.本实施例是在上述实施例六的基础上进行优化。
59.还包括定位模块,定位模块与主控芯片电连接。具体的,定位模块可以选择gps模
块,gps模块用于实时获取无人机的位置信号,并将位置信号发送至主控芯片。
60.实施例八:
61.本实施例是在上述实施例六的基础上进行优化。
62.为了检测碰撞信息,还包括设置在无人机主体上的碰撞传感器模组,碰撞传感器模组与主控芯片电连接。
63.实施例九:
64.本实施例是在上述实施例六的基础上进行优化。
65.通讯模块连接有信号放大模块,信号放大模块连接有天线。通讯模块包括5.8g通讯模块、2.4g通讯模块、5g通讯模块和wifi通讯模块。本无人机提供对2.4g频道和5.8g频道的无线终端接入支持,实现双频无线网络接入设备的作用。同时通过5g通讯模块可实现在无wifi热点的情况下无人机的网络通信。通过wifi模块用于实现主控芯片与服务器之间的数据通讯,对于有wifi热点的室内场景,本无人机支持无线wifi传输协议。
66.最后应说明的是:以上仅为本实用新型的优选实施例而已,并不用于限制本实用新型的保护范围。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1