顶升式自动加水消杀无人机的制作方法
1.本实用新型涉及无人机领域,尤其涉及一种顶升式自动加水消杀无人机。
背景技术:
2.如今无人机已经在广泛使用,喷淋无人机通常是配备水箱进行作业,现有无人机配备的水箱在使用过程通常都采用人工手动加水,但由于无人机水箱为避免无人机飞行作业时的晃动导致液体洒落通常设置水箱的加水口较小,例如采用瓶口方式用瓶盖螺旋拧紧或是采用卡扣式盖子,这些方式加水时需要人工打开水箱盖,十分麻烦,且在无人机升空作业时,水箱内液体何时使用完操作人员难以通过肉眼观察看出,需要凭经验判断无人机无法洒出液体后才知道,该种情况需要工作人员时刻都要观察着无人机的状态,工作负担巨大,提高无人机的智能性,实现无人机加水的自动化,减小工作人员的繁琐操作过程和工作负担就显得十分有必要。
3.对于疫情严重或者管理要求高、且较为空旷的大型场所(如操场、训练馆、公园)进行消杀是一个很困难的工作,由于空旷且面积大,工作强度大、往返加药水的无用功多、消杀地域容易重复或遗漏。
4.水池或水罐中用于盛装配备好的消杀药水是现有技术,水池或水罐配备有电子感应阀控制的水龙头也是现有技术,无人机也是现有技术,通过三者的结构和电子信息配合实现自动化加水,可以有效的提高消杀效率。
技术实现要素:
5.本实用新型的目的在于提供一种能够自动打开水箱盖进行加水的顶升式自动加水消杀无人机,旨在解决现有消杀无人机需要人工加水,工作负担大、效率低的问题。
6.本实用新型采用的技术方案是:一种顶升式自动加水消杀无人机包括机身、引擎、机翼和控制模块,其特征在于:还包括机架、水箱架、水箱和自动加水装置,所述机架由四根竖直的支杆构成,四根支杆的下端分别设置有万向轮,支杆与支杆之间通过横向连杆相互连接形成一四方体框架状的机架,水箱架设置在机架内部呈四方体框架形状,水箱架的四个竖直边处分别设置有中通的圆柱形连接件,四个连接件分别用连杆与所述机架的四根支杆固定连接,水箱固定在水箱架内,水箱外底部安装有信号接收板,水箱和水箱盖呈长方形,在水箱盖的四个角分别设置有沿水平方向向外突出的圆环形固定盘,水箱盖立杆竖直穿过圆环形固定盘,水箱盖立杆上端与圆环形固定盘用弹簧连接,弹簧套在水箱盖立杆上,使得水箱盖可在水箱盖立杆上上下伸缩,水箱盖立杆下端安装有万向轮,无人机升空时水箱盖立杆的重力通过弹簧将水箱盖压紧在水箱上,此时水箱盖立杆的万向轮低于支杆的万向轮更接近地面,无人机降落后无人机的重力使得弹簧将水箱盖打开高度≥10cm;无人机起飞时无人机的控制模块记录起降点为坐标原点,所述水箱设置有水位智能感应装置,包括水位控制模块,低水位探针和高水位探针,水位控制模块安装在机身上并用信号线与无人机的控制模块连接,低水位探针安装在靠近水箱底部的水箱内侧面位置,高水位探针安
装在靠近水箱口内侧面位置,低水位探针和高水位探针分别用信号线与水位控制模块连接,低水位探针检测到水位低时水位控制模块将信息传递给无人机的控制模块控制无人机返回坐标原点并降落,自动加水装置设置在无人机的起降点附近,包括与信号接收板对应的信号发射板,还包括信号发射板上方的水龙头,水箱盖打开高度≥水龙头的高度≥水箱高度,水龙头由电子感应阀控制,当信号接收板位于信号发射板上方时无人机的控制模块发射电子信号给电子感应阀控制水龙头开水,当高水位探针检测到水位高时水位控制模块将信息传递给无人机的控制模块发射电子信号给电子感应阀控制水龙头关水。
7.本实用新型的进一步技术方案是:水箱开口处设置有一圈磁性密封条,水箱盖朝下的一面设置有与水箱箱体上相对应的磁性密封条,在能确保水箱盖的稳定性的同时提高水箱盖的密闭性,因为有磁性吸力,水箱盖的打开或关闭更为便捷,水箱盖亦不会由于飞机作业时的晃动而导致水箱盖脱落。
8.本实用新型的进一步技术方案是:信号发射板上在靠近发射板的四个角处分别设置有红外信号发射点,在信号接收板上设置与信号发射板上的信号发射点相对应的红外信号接收点,无人机定位更为精准。
9.本实用新型的进一步技术方案是:所述水龙头为扁平状水龙头,出水方向垂直朝下,占用空间小,方便加水。
10.本实用新型的进一步技术方案是:所述水箱和水箱盖由聚乙烯或聚丙烯材料做成,能够减轻无人机自身重量,降低电池消耗,提高无人机的续航能力。
11.本实用新型的进一步技术方案是:所述无人机金属部分由铝合金材料制成,强度更好。
12.本实用新型的有益效果是:由于采用上述技术方案,实用新型之顶升式自动加水消杀无人机可实现无人机水箱的自动打开,自动加水处理,在作业过程中能够极大程度的减少作业人员的负担、并提高工作效率。
附图说明
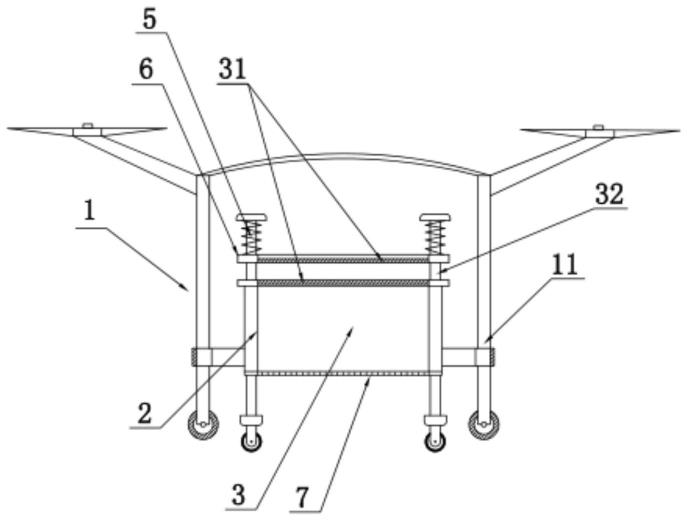
13.图1是本实用新型所述顶升式自动加水消杀无人机的结构示意图;
14.图2是本实用新型所述无人机停在自动加水装置上的示意图;
15.图3是本实用新型所述水箱的俯视示意图。
具体实施方式
16.下面结合附图和具体实施方式对实用新型做进一步的说明。
17.实施例:
18.首先用水池或水罐中盛装配备好的消杀药水,水池或水罐配备有电子感应阀控制的水龙头,优选的使用装有电子感应阀控制的水龙头的移动式水罐车。
19.如图1至3所示的一种顶升式自动加水消杀无人机,包括机身、引擎、机翼和控制模块,还包括机架1、水箱架2、水箱3和自动加水装置4,所述机架由四根竖直的支杆11构成,四根支杆11的下端分别设置有万向轮,支杆与支杆之间通过横向连杆相互连接形成一四方体框架状的机架,水箱架设置在机架内部呈四方体框架形状,水箱架的四个竖直边处分别设置有中通的圆柱形连接件21,四个连接件21分别用连杆与所述机架的四根支杆固定连接,
水箱3固定在水箱架2内,水箱3外底部安装有信号接收板7,水箱和水箱盖呈长方形,在水箱盖的四个角分别设置有沿水平方向向外突出的圆环形固定盘6,水箱盖立杆32竖直穿过圆环形固定盘6,水箱盖立杆上端与圆环形固定盘用弹簧5连接,弹簧套在水箱盖立杆上,使得水箱盖可在水箱盖立杆上上下伸缩,水箱盖立杆32下端安装有万向轮,无人机升空时水箱盖立杆的重力通过弹簧将水箱盖压紧在水箱上,此时水箱盖立杆的万向轮低于支杆的万向轮更接近地面,无人机降落后无人机的重力使得弹簧将水箱盖打开高度≥10cm。
20.无人机起飞时无人机的控制模块记录起降点为坐标原点,所述水箱设置有水位智能感应装置,包括水位控制模块9,低水位探针92和高水位探针91,水位控制模块9安装在机身上并用信号线与无人机的控制模块连接,低水位探针安装在靠近水箱底部的水箱内侧面位置,高水位探针安装在靠近水箱口内侧面位置,低水位探针和高水位探针分别用信号线与水位控制模块连接,低水位探针检测到水位低时水位控制模块将信息传递给无人机的控制模块控制无人机返回坐标原点并降落,自动加水装置4设置在无人机的起降点附近,包括与信号接收板对应的信号发射板8,还包括信号发射板上方的水龙头41,水箱盖打开高度≥水龙头的高度≥水箱高度,水龙头由电子感应阀控制,当信号接收板位于信号发射板上方时,无人机的控制模块发射电子信号给电子感应阀控制水龙头开水,当高水位探针检测到水位高时水位控制模块将信息传递给无人机的控制模块发射电子信号给电子感应阀,控制水龙头关水。
21.无人机的控制模块中加入了记录起降原点和建立坐标的功能模块,以及发射电子信号模块控制电子感应阀,信号发射板8上在靠近发射板的四个角处分别设置有红外信号发射点,在信号接收板7上设置与信号发射板上的信号发射点相对应的红外信号接收点,使得无人机回到起降点后可以自动识别并到达指定位置降落停好,无人机停好后(也就是信号接收板位于信号发射板上方时),无人机的控制模块发射电子信号给电子感应阀控制水水龙头开水,当高水位探针检测到水位高时水位控制模块将信息传递给无人机的控制模块发射电子信号给电子感应阀控制水水龙头关水。
22.优选的,所述水箱开口处设置有一圈磁性密封条31,水箱盖朝下的一面设置有与水箱箱体上相对应的磁性密封条。
23.优选的,所述信号发射板上在靠近发射板的四个角处分别设置有红外信号发射点,在信号接收板上设置与信号发射板上的信号发射点相对应的红外信号接收点。
24.优选的,水龙头为扁平状水龙头,出水方向垂直朝下,占用空间少更利于加水。
25.优选的,所述水箱和水箱盖由聚乙烯或聚丙烯材料做成,能够极大程度的减小无人机的自重,降低电池消耗。
26.优选的,所述无人机金属部分由铝合金材料制成。
27.以上所述仅为实用新型的较佳实施例而已,并不用以限制实用新型,凡在实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1