一种适用电力巡检的无人机的制作方法
本发明属于无人机,具体是指一种适用电力巡检的无人机。
背景技术:
1、高压输电线路存在着分布范围广,故障种类多、检修难度大的特点,为无人机电力巡检技术的推广应用创造了条件,对于人手比较欠缺的基层供电公司来说,运用无人机电力巡检技术成为必然选择。当前国内的无人机,普遍存在续航能力不足的问题,如果需要无人机在较长线段进行任务,以当下的无人机续航能力,无疑是一个难点。
技术实现思路
1、针对上述情况,为克服现有技术的缺陷,本发明提供了一种抗震能力强、续航效果好、拍摄稳定的适用电力巡检的无人机,通过高压线障碍物跨越机构的长度补偿跨越组件,可平稳跨越高压电线上的障碍物,进而调高电力巡检的效率,利用卡合螺旋桨的倾斜度可防止无人机在跨越障碍时掉落。
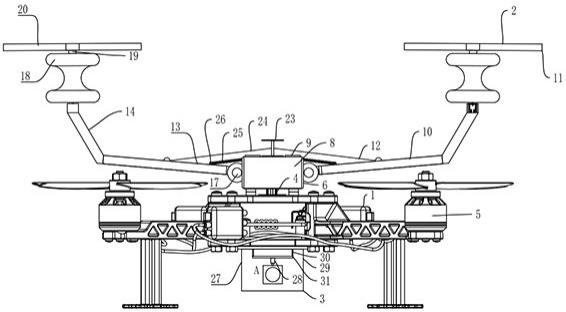
2、本发明采取的技术方案如下:本发明提供了一种适用电力巡检的无人机,包括巡检主体、引力补偿贴合辅助机构、高压线障碍物跨越机构和防外力摇晃画面稳定机构,所述高压线障碍物跨越机构设于巡检主体上,所述防外力摇晃画面稳定机构设于巡检主体的下端,所述引力补偿贴合辅助机构设于巡检主体上;所述高压线障碍物跨越机构包括障碍物外推拉伸组件、长度补偿跨越组件和轨道固定组件,所述障碍物外推拉伸组件设于巡检主体上,所述长度补偿跨越组件设于障碍物外推拉伸组件的一端,所述轨道固定组件设于巡检主体上。
3、进一步地,所述巡检主体包括无人机、设备腔、摄像头、电源和太阳能光伏板,所述无人机设于巡检主体上,所述设备腔可拆卸设于无人机上,所述摄像头设于防外力摇晃画面稳定机构内,所述电源设于设备腔内,所述太阳能光伏板设于设备腔的外部上端。
4、进一步地,所述障碍物外推拉伸组件包括连接管一、连接杆一、弹簧一、缓冲杆和铰链一,所述铰链一设于设备腔的侧壁上,所述连接管一的一端设于铰链一上,所述缓冲杆的一端滑动设于连接管一内,所述弹簧一套接设于缓冲杆上,所述弹簧一的一端设于缓冲杆的一端,所述弹簧一的另一端设于连接管一的内部另一端,所述连接杆一的一端设于缓冲杆的另一端。
5、进一步地,所述长度补偿跨越组件包括电缆卡合滚轴、转动轴、卡合螺旋桨和驱动电机,所述驱动电机设于连接杆一的内部上端,所述电缆卡合滚轴设于驱动电机的输出端,所述转动轴设于电缆卡合滚轴的上端,所述卡合螺旋桨设于转动轴的上端。
6、进一步地,所述轨道固定组件包括电机二、线盘、绳索、弹簧二和铰链二,所述电机二设于设备腔的内部上端,所述线盘设于电机二的输出端,所述绳索的一端设于线盘上,所述绳索的另一端设于连接管一的侧壁上,所述铰链二设于连接管一的外臂上,所述弹簧二的一端设于铰链二上,所述弹簧二的另一端设于设备腔的侧壁上。
7、进一步地,所述防外力摇晃画面稳定机构包括重力下坠时角度自调整组件和悬浮式减震组件,所述重力下坠时角度自调整组件设于无人机的下端,所述悬浮式减震组件设于重力下坠时角度自调整组件的下端。
8、进一步地,所述重力下坠时角度自调整组件包括透密防护罩、连接杆二、固定环、平衡调整环一、平衡调整环二、连接轴一、连接轴二和衔接件,所述透密防护罩设于无人机的下端,所述连接杆二设于透密防护罩的内部上端,所述固定环设于连接杆二的下端,所述连接轴一的一端设于固定环的内环上,所述平衡调整环一的外壁设于连接轴一的另一端,所述连接轴二的一端设于平衡调整环一的内环上,所述平衡调整环二的外环设于连接轴二的另一端,所述衔接件设于平衡调整环二的内环上。
9、进一步地,所述悬浮式减震组件包括缓冲管一、缓冲管二、磁块一、磁块二和磁块三,所述缓冲管一设于衔接件的下端,所述磁块一设于缓冲管一的内部上端,所述磁块三设于缓冲管一的内部下端,所述磁块二滑动设于缓冲管一内,所述缓冲管二的一端设于磁块二的下端,所述缓冲管二滑动内套接设于磁块三上,所述摄像头设于缓冲管二的下端。
10、进一步地,所述引力补偿贴合辅助机构包括强磁铁一、强磁铁二、电机三、丝杠、套管、伸缩件和推板,所述强磁铁一设于设备腔的下端,所述强磁铁二设于无人机的上端,所述电机三设于设备腔的内部下端,所述丝杠设于电机三的输出端,所述套管套接设于丝杠上,所述丝杠和连接轴一螺纹连接,所述推板设于丝杠的下端,所述伸缩件的一端设于设备腔的内部下端,所述伸缩件的另一端设于推板上。
11、进一步地,所述磁块一的下端和磁块二的上端磁性相同,所述磁块二的下端和磁块三的上端磁性相同,所述强磁铁一的下端和强磁铁二的上端磁性相反,所述太阳能光伏板电连接电源,所述电源电连接电机二,所述电源电连接电机三。
12、采用上述结构本发明取得的有益效果如下:本发明提供了一种适用电力巡检的无人机,实现了如下有益效果:
13、为了提高无人机巡检的续航时间,本发明提出了高压线障碍物跨越机构的长度补偿跨越组件,可平稳跨越高压电线上的障碍物,进而调高电力巡检的效率,利用卡合螺旋桨的倾斜度可防止无人机在跨越障碍时掉落。
14、为了进一步提高实用性和可推广性,本发明提出了防外力摇晃画面稳定机构,通过平衡调整环一和平衡调整环二的自动平衡调整,摄像头始终保持稳定状态,有利于对电线塔的拍摄检测。
15、透密防护罩的作用是防止风对摄像头的影响。
16、因为磁块二悬浮在磁块一和磁块二之间,缓冲管二在磁块二的下端,摄像头在缓冲管二的下端,所以对摄像头的震动影响很小,有利于保护设备和拍摄的稳定性。
17、电线塔检测完后无人机回到设备腔的下端,利用强磁铁一和强磁铁二进行固定,减小了无人机回收的操作难度。
技术特征:
1.一种适用电力巡检的无人机,包括巡检主体(1)和引力补偿贴合辅助机构(4),其特征在于:所述适用电力巡检的无人机(1)还包括高压线障碍物跨越机构(2)和防外力摇晃画面稳定机构(3),所述高压线障碍物跨越机构(2)设于巡检主体(1)上,所述防外力摇晃画面稳定机构(3)设于巡检主体(1)的下端,所述引力补偿贴合辅助机构(4)设于巡检主体(1)上;所述高压线障碍物跨越机构(2)包括障碍物外推拉伸组件(10)、长度补偿跨越组件(11)和轨道固定组件(12),所述障碍物外推拉伸组件(10)设于巡检主体(1)上,所述长度补偿跨越组件(11)设于障碍物外推拉伸组件(10)的一端,所述轨道固定组件(12)设于巡检主体(1)上。
2.根据权利要求1所述的一种适用电力巡检的无人机,其特征在于:所述巡检主体(1)包括无人机(5)、设备腔(6)、摄像头(7)、电源(8)和太阳能光伏板(9),所述无人机(5)设于巡检主体(1)上,所述设备腔(6)可拆卸设于无人机(5)上,所述摄像头(7)设于防外力摇晃画面稳定机构(3)内,所述电源(8)设于设备腔(6)内,所述太阳能光伏板(9)设于设备腔(6)的外部上端。
3.根据权利要求2所述的一种适用电力巡检的无人机,其特征在于:所述障碍物外推拉伸组件(10)包括连接管一(13)、连接杆一(14)、弹簧一(15)、缓冲杆(16)和铰链一(17),所述铰链一(17)设于设备腔(6)的侧壁上,所述连接管一(13)的一端设于铰链一(17)上,所述缓冲杆(16)的一端滑动设于连接管一(13)内,所述弹簧一(15)套接设于缓冲杆(16)上,所述弹簧一(15)的一端设于缓冲杆(16)的一端,所述弹簧一(15)的另一端设于连接管一(13)的内部另一端,所述连接杆一(14)的一端设于缓冲杆(16)的另一端。
4.根据权利要求3所述的一种适用电力巡检的无人机,其特征在于:所述长度补偿跨越组件(11)包括电缆卡合滚轴(18)、转动轴(19)、卡合螺旋桨(20)和驱动电机(21),所述驱动电机(21)设于连接杆一(14)的内部上端,所述电缆卡合滚轴(18)设于驱动电机(21)的输出端,所述转动轴(19)设于电缆卡合滚轴(18)的上端,所述卡合螺旋桨(20)设于转动轴(19)的上端。
5.根据权利要求4所述的一种适用电力巡检的无人机,其特征在于:所述轨道固定组件(12)包括电机二(22)、线盘(23)、绳索(24)、弹簧二(25)和铰链二(26),所述电机二(22)设于设备腔(6)的内部上端,所述线盘(23)设于电机二(22)的输出端,所述绳索(24)的一端设于线盘(23)上,所述绳索(24)的另一端设于连接管一(13)的侧壁上,所述铰链二(26)设于连接管一(13)的外臂上,所述弹簧二(25)的一端设于铰链二(26)上,所述弹簧二(25)的另一端设于设备腔(6)的侧壁上。
6.根据权利要求5所述的一种适用电力巡检的无人机,其特征在于:所述防外力摇晃画面稳定机构(3)包括重力下坠时角度自调整组件(27)和悬浮式减震组件(28),所述重力下坠时角度自调整组件(27)设于无人机(5)的下端,所述悬浮式减震组件(28)设于重力下坠时角度自调整组件(27)的下端。
7.根据权利要求6所述的一种适用电力巡检的无人机,其特征在于:所述重力下坠时角度自调整组件(27)包括透密防护罩(29)、连接杆二(30)、固定环(31)、平衡调整环一(32)、平衡调整环二(33)、连接轴一(34)、连接轴二(35)和衔接件(48),所述透密防护罩(29)设于无人机(5)的下端,所述连接杆二(30)设于透密防护罩(29)的内部上端,所述固定环(31)设于连接杆二(30)的下端,所述连接轴一(34)的一端设于固定环(31)的内环上,所述平衡调整环一(32)的外壁设于连接轴一(34)的另一端,所述连接轴二(35)的一端设于平衡调整环一(32)的内环上,所述平衡调整环二(33)的外环设于连接轴二(35)的另一端,所述衔接件(48)设于平衡调整环二(33)的内环上。
8.根据权利要求7所述的一种适用电力巡检的无人机,其特征在于:所述悬浮式减震组件(28)包括缓冲管一(36)、缓冲管二(37)、磁块一(38)、磁块二(39)和磁块三(40),所述缓冲管一(36)设于衔接件(48)的下端,所述磁块一(38)设于缓冲管一(36)的内部上端,所述磁块三(40)设于缓冲管一(36)的内部下端,所述磁块二(39)滑动设于缓冲管一(36)内,所述缓冲管二(37)的一端设于磁块二(39)的下端,所述缓冲管二(37)滑动内套接设于磁块三(40)上,所述摄像头(7)设于缓冲管二(37)的下端。
9.根据权利要求8所述的一种适用电力巡检的无人机,其特征在于:所述引力补偿贴合辅助机构(4)包括强磁铁一(41)、强磁铁二(42)、电机三(43)、丝杠(44)、套管(45)、伸缩件(46)和推板(47),所述强磁铁一(41)设于设备腔(6)的下端,所述强磁铁二(42)设于无人机(5)的上端,所述电机三(43)设于设备腔(6)的内部下端,所述丝杠(44)设于电机三(43)的输出端,所述套管(45)套接设于丝杠(44)上,所述丝杠(44)和连接轴一(34)螺纹连接,所述推板(47)设于丝杠(44)的下端,所述伸缩件(46)的一端设于设备腔(6)的内部下端,所述伸缩件(46)的另一端设于推板(47)上。
10.根据权利要求9所述的一种适用电力巡检的无人机,其特征在于:所述磁块一(38)的下端和磁块二(39)的上端磁性相同,所述磁块二(39)的下端和磁块三(40)的上端磁性相同,所述强磁铁一(41)的下端和强磁铁二(42)的上端磁性相反,所述太阳能光伏板(9)电连接电源(8),所述电源(8)电连接电机二(22),所述电源(8)电连接电机三(43)。
技术总结
本发明属于无人机技术领域,具体是指一种适用电力巡检的无人机,包括巡检主体、引力补偿贴合辅助机构、高压线障碍物跨越机构和防外力摇晃画面稳定机构,所述高压线障碍物跨越机构设于巡检主体上,所述防外力摇晃画面稳定机构设于巡检主体的下端,所述引力补偿贴合辅助机构设于巡检主体上;本发明提供了一种抗震能力强、续航效果好、拍摄稳定的适用电力巡检的无人机,通过高压线障碍物跨越机构的长度补偿跨越组件,可平稳跨越高压电线上的障碍物,进而调高电力巡检的效率,利用卡合螺旋桨的倾斜度可防止无人机在跨越障碍时掉落。
技术研发人员:张永钢,郭咏
受保护的技术使用者:江苏伊卡洛斯电力无人机通用技术有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!