一种变距直驱混合动力复合翼垂起无人机
本发明涉及无人机,特别涉及一种变距直驱混合动力复合翼垂起无人机。
背景技术:
1、根据无人机布局架构将无人机进行分类,可以将无人机分为旋翼无人机、固定翼无人机、以及垂起固定翼无人机三类,旋翼无人机依靠其单个或多个置于机身上方的旋翼产生垂直向上的拉力从而使无人机运动。不同的旋翼个数将旋翼无人机区分为单旋翼无人机(直升机)及多旋翼无人机两种。旋翼无人机通过改变旋翼转速或倾角进而改变飞行器的飞行轨迹。旋翼无人机具有结构简单、响应速度快、能够垂直起降的优点,被广泛应用于各种民用领域,但受限于其布局架构以及体积,使其无法满足需要高速远距离飞行的应用场景。
2、固定翼无人机依靠机身两侧固定机翼以及单个或多个推进系统产生升力和向前的飞行速度。固定翼无人机具有飞行速度快、载重大、航程航时长等特点,被广泛应用于需要大载重或长航时飞行的物流运输及电力巡检方面,但由于固定翼无人机必须具有一定的飞行速度机翼才能产生升力,因此无法实现垂直机动,固定翼无人机在起降时需要跑道或弹射器,这极大的限制了其应用场景。
3、垂起固定翼无人机是近年来解决以上两种类型无人机缺陷而推出的一种无人驾驶飞机,此类型无人机既能够像旋翼无人机一样垂直起降,又具有固定翼无人机的高飞行速度、大载重、长航时的特点。根据布局形式可以将垂起固定翼无人机分为升推复合式和倾转动力式两种。升推复合式垂起固定翼无人机(又称复合翼垂起无人机)是将多旋翼与固定翼进行组合,此类无人机在不同的飞行阶段由不同的动力系统提供动力:在起降时由旋翼提供升力;在平飞巡航时,由机翼提供升力。倾转动力式是通过倾转动力机构实现不同方向的飞行:起降时,动力机构产生向上的拉力,在过渡阶段动力机构倾转使其产生前拉的拉力。
4、无人机传统的动力系统能量来源可以分为电池和燃油两类。其中电池主要作为以多旋翼无人机为代表的中小型无人机的能量来源,虽然电动机具备响应快、易控制、重量轻的优点,但受限于当前电池的能量密度问题,在无人机需要完成长航时、大载重任务时,采用电池作为单一能量源会出现续航能力差,飞行时间短的劣势。燃油主要作为以固定翼无人机为代表的中大型无人机的能量来源,由于燃油的高能量密度,内燃机作为无人机的动力系统使得无人机具备较强的飞行续航能力,但其响应速度慢的劣势使得无人机无法满足需要快速响应的应用场景。
5、复合翼垂起无人机由于其布局特点,多采用双源动力系统形式,即在垂起无人机不同的飞行工作模式下采用两种独立的动力来源分别用作推进和悬停起降。目前市面上常用内燃机-动力锂电池作为复合翼垂起无人机的双源动力系统,此类垂起无人机在垂直起降和悬停时采用动力锂电池作为动力来源驱动多旋翼进行垂直机动,此时内燃机处于关闭状态;在巡航时采用内燃机作为动力来源驱动推进螺旋桨进行平飞机动,此时多旋翼处于不工作状态。此类型无人机虽然有效提高了无人机的载荷与航程,但该型无人机存在固有缺陷:一为能量利用率低,双动力源间无能量流动关系,锂电池无法进行充电,因此整机垂直机动时间依然受限于电池容量,致使无人机垂直机动时间较短。二为动力冗余度低,即单个动力源失效后,双源动力间无法形成有效冗余,这极大的降低了无人机的飞行安全性。
6、混合动力推进是解决以上问题的有效方式,其中油电混合动力技术以其显著优势成为解决目前无人机能量利用率低、动力冗余度低、航程航时短等瓶颈的前沿发展方向。当前,油电混动技术多用于多旋翼无人机。油电混动多旋翼无人机由发动机带动发电机进行发电为电动机提供电能,锂电池作为辅助能量源,此种方式极大的提高了多旋翼无人机的航时,但受限于旋翼无人机气动布局,其航程短和有效载荷低的缺陷仍未得到改善。而随着垂起固定翼无人机的面世,油电混合动力技术在垂起固定翼无人机上的应用成为一大研究热点。研究与设计适配于垂起固定翼无人机的混合动力系统能够使垂起无人机具备更强的多模式飞行适应能力,有效提升垂起固定翼无人机的航程航时与能量利用率。
7、在无人机油电混动总成方面。北京瑞深航空科技有限公司成功研制出功率2kw的油电混合动力装置h2,其适用于最大起飞重量18kg以下的多旋翼无人机和垂直起降固定翼无人机使用。搭载3kg商载的情况下,航时可达2小时,最大航时可达到5小时。2017年12月,中科灵动航空科技成都有限公司推出灵动鹰-25六旋翼可折叠油电混合动力无人机,无人机搭载其公司自主研发的油电混动总成,总成采用国际通用92#汽油作为动力,灵动鹰-25在负载5kg时持续飞行时间能达到90min(海拔高度为0m),平飞速度18m/s,控制半径10km(可扩展至30km),最大飞行高度2500m,可以在7级大风、小雨条件下顺利飞行。整机自重约17kg,满油约21kg,使用温度范围-10℃~40℃。2019年,中航金城无人系统公司推出了一款油电混合动力六旋翼无人机。该无人机的油电混合动系统采用串联式,系统模块化程度高,互换性好,能量利用效率高达95%。该无人机最大载重20kg,在满载的条件下,可留空飞行2h,如果空载则最大航时可达3h,覆盖的应用范围较广,整机性能优于大部分多旋翼无人机。2020年,弥勒浩翔科技有限公司成功推出一款油电混合动力多旋翼无人机。该无人机搭载公司自主研发生产的dle70hd两冲程水冷无人机引擎,具有重量轻、功率大、寿命长的特点。使用普通汽油作为基本动力燃料,最大起飞重量可达43kg。满油后最大作业载荷可达10kg(可以使用燃油重量来换取额外载重),一次加油可连续飞行6h,最大水平飞行速度20m/s,最大可承受8级大风,最大飞行高度3000m,航程可达432km,突破了前所未有的长航时以及高效性能。2021年,珠海上飞航空科技有限公司采用轻量化设计,一体化集成方法推出多款油电混合动力系统。这些系统具有模块化便捷维护、实时数据可视、快速拆卸、启发一体功能、支持多电压输出等特点,适用于多旋翼无人机和垂起复合翼无人机等,在国内和国际市场获得了较高的影响力。主要型号有:①f23k油电混合动力系统:持续功率23kw,重量39.5kg(含冷却系统)。②f6000油电混合动力系统:持续功率5600w,最大功率6500w,重量9.5kg。③f7000油电混合动力系统(图3):持续功率6000w,最大功率7000w,重量12kg(含冷却系统。④f16k油电混合动力系统:持续功率14kw,最大功率16kw,重量29.5kg(含冷却系统)。⑤f6000 v2.0油电混合动力系统:持续功率5300w,最大功率:6000w,重量7kg(不含冷却系统)。以上油电混动总成较成熟的应用是在多旋翼无人机上,其原理为采用串联式油电混动总成替代动力锂电池作为动力源,通过活塞发动机输出轴驱动永磁发电机进行发电为多个驱动旋翼的电动机提供电能,同时动力系统中通常也包含一个较小容量的备用锂电池与整流器直流输出端并联,锂电池能够由发电机实现充电。此种方案在内燃机与动力锂电池之间建立了能量流动关系,提升了整机的能量密度,因此也可以称为增程式油电混合动力系统。而此类在两种能量源间建立了能量流动关系的油电混动总成在垂起固定翼无人机上的应用尚不成熟。
8、在垂起固定翼无人机方面,2017年,翔鸿科技自主设计、研发的智慧蜂油电混合动力垂直起降固定翼无人机采用油电混合动力系统为飞行器的长久续航提供可靠的解决方案,该系统发电机与启动器采用一体化设计,一键启动,可进行空中点火,无需人工操作启动器启动发动机;同年中铭智享推出了他们自己研发的油电混合动力垂起无人机。2018年1月,蜂巢航宇hc-520型油电混动全电驱垂直起降固定翼无人机完成各项测试,此无人机最大起飞重量26kg,巡航速度24m/s,最大飞行速度可达35m/s。2018年3月,智航无人机于第18届国际石油装备展发布油电混合垂直起降无人机v-400h,此无人机拥有杰出的高原性能,其额定载荷3kg,续航时间3-5h,航程近300km。2021年8月,汇星海科技(天津)有限公司研发的鸭翼无人机——油电混动垂起固定翼成功试飞,最大起飞重量32kg,续航达6小时。同年9月,大鹏cw-40军民两用无人机亮相珠海航展,cw-40最大起飞重量45kg,采用国产四冲程电喷发动机(可选配汽油版和重油版)、北斗差分gps导航系统、国产自主知识产权航电系统,最大载重10千克,有效控制半径200千米,搭载高性能三光光电吊舱,适用于大面积、长距离视频监控场景。2023年1月,飞龙科技发布了一款专为测绘设计的超长航时混合垂直起降无人机fdg50f,其有效载荷为10公斤,续航时间可达7小时。上述油电混动垂起无人机实际并不是真正的油电混动,而是一种油电双源混合推进垂起无人机,此种无人机的动力系统主要由内燃机、锂电池、电子调速器、电动机、升力旋翼、推进螺旋桨及其他电力电子设备组成。其动力系统布局形式为推拉并行式结构,此结构中电动机与内燃机没有机械耦合,即内燃机或电动机能够单独满足航空器部分飞行工况的功率需求,其能够允许设计者分别对悬停或爬升和巡航性能进行优化。传统的油电双源混合推进垂起无人机具有两种模式,一是内燃机模式,即内燃机作为单一能量源直驱推进螺旋桨为无人机平飞巡航提供推进动力;二是电池模式,即电池同样作为单一能量源驱动电动机为无人机起降或悬停提供动力,此结构虽然在提升无人机航程航时等性能表现方面具有显著作用,但此结构中内燃机与锂电池并未实现机械或功率耦合,两者分别作为垂起无人机两种不同工作模式(垂直机动与平飞巡航)的能量来源,因此仍然具有一些缺陷亟待改善。
9、现有的纯旋翼油电混动无人机对于整机来说虽然提高了航时,但受限于旋翼无人机气动布局,航程短和有效载荷低的缺陷仍未得到较大程度改善,且能量利用效率不高。针对油电混动旋翼无人机的上述问题,部分厂商提出油电混动垂起固定翼无人机,但多为“伪混动”,即油电双源混合推进,实际并未在油电两种能量源之间建立能量流动关系,而类似于油电混动多旋翼无人机在两种能量源间建立了能量流动关系的油电混动总成在垂起固定翼无人机上的应用尚不成熟。
10、油电双源混合推进垂起无人机,在实际使用过程中发现此结构具有以下固有缺陷:
11、(1)能量利用率低。内燃机作为系统内能量源并未完全发挥其作用,其主要在垂起无人机巡航平飞时提供能量来源,然而无人机的巡航平飞并不需要过多功率需求,内燃机因此可能并未处于最佳工作区间内。
12、(2)发电效率低。传统油电双源混合推进垂起无人机动力系统不具备发电机,或者内燃机直驱一个小型发电机以用于机载电子设备供电。然而实际应用时,很难将内燃机驱动推进螺旋桨的效率结合发电机发电效率一同考虑,通常更倾向于前者。
13、(3)动力冗余度低。内燃机与电池之间并未形成能量流动,因此在某一能量源失效后,双能量源间无法形成冗余,尤其电池失效后,无人机无法实现垂直着陆或起降。
14、(4)垂直起降动力源能量密度低。在垂直起飞或降落时,动力来源仍为动力锂电池,而锂电池的能量密度偏低,这极大的限制了传统双源混合推进垂起无人机的垂直机动时间。
技术实现思路
1、本发明解决的目的在于提供一种变距直驱混合动力复合翼垂起无人机,设计出一种适配于垂直起降固定翼无人机的变距直驱混合动力系统,并在此基础上提供一种搭载变距直驱混合动力的垂直起降固定翼无人飞行器,用于实现平飞机动模式与垂直机动模式飞行,采用大展弦比机翼与设计适配于活塞发动机的变距螺旋桨推进装置来提升整机平飞机动模式下性能;采用大尺寸旋翼提升整机垂直机动模式下的垂直机动效率。通过解决以上技术问题使得工业级垂起无人机具备模式与功能多样性,以扩展工业级无人机应用场景。
2、为了达到上述目的,本发明采用的技术方案如下:
3、一种变距直驱混合动力复合翼垂起无人机,包括机体和安装于机体的变距直驱混合动力系统;
4、所述变距直驱混合动力系统包括内燃机、变距螺旋桨、发电机、整流装置、锂电池、电子调速器、电动机和升力旋翼,所述内燃机的前输出轴连接所述变距螺旋桨,所述内燃机的后输出轴连接所述发电机,所述发电机通过所述整流装置连接所述锂电池,所述锂电池和所述整流装置均通过汇流条连接所述电子调速器,所述电子调速器连接所述电动机,所述电动机连接所述升力旋翼。
5、进一步地,所述内燃机和所述发电机安装于同一安装面,并通过减震橡胶垫松约束。
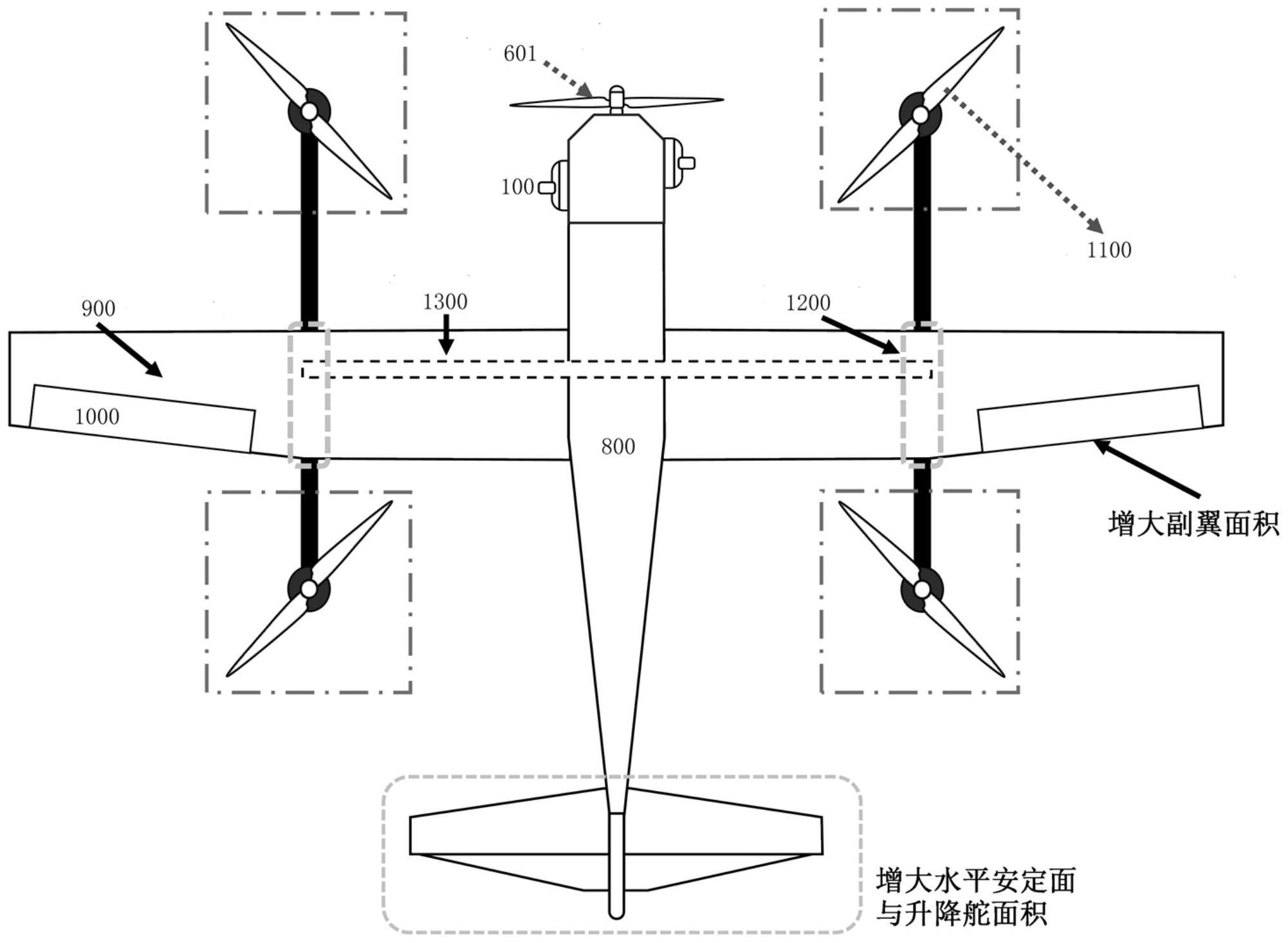
6、进一步地,所述机体包括机身和大展弦比梯形机翼,所述内燃机安装在所述机身头部的防火安装板上,所述变距螺旋桨设置在所述机身的前端,所述升力旋翼设置在所述大展弦比梯形机翼上,所述大展弦比梯形机翼上设置有加强翼梁和加强翼肋,在所述机体包括机身和大展弦比梯形机翼上分别设置有水平安定面。
7、进一步地,所述机身内部设置有飞控系统和油箱,所述飞控系统固定在减震泡沫上并粘贴于机身内壁,以悬于汽油箱上方,所述飞控系统和所述油箱与整机重心线重合,所述内燃机和所述发电机设置在所述机身头部的防火安装板上,所述锂电池与所述整流器设置在所述机身后部,以使整机重心仍保持于三重心重叠部分。
8、进一步地,所述整流器挂于机腹外部。
9、进一步地,所述机身内部在所述发电机的后方设置有动控系统,所述动控系统采用防波胶带包裹。
10、进一步地,通过如下公式对目标起飞重量m进行核算:
11、m≥∑m=m1+m2+m3+m4+m5+m6 (1)
12、其中,m1为固定翼机身重量,m2为变距直驱混合动力系统及其配件重量,m3为多旋翼机架重量,m4为旋翼与电动机组成的电推进动力装置重量,m5为航电与控制系统重量,m6为油箱重量,∑m为无人机总重量;
13、若目标起飞重量不满足公式(1),则根据如下公式进行重量优化:
14、l=m-∑m (2)
15、其中l为整机任务载荷。
16、进一步地,所述变距直驱混合动力复合翼垂起无人机具有三种工作模式,分别为垂直机动工作模式、平飞机动工作模式和过渡转换工作模式;
17、垂直机动工作模式下,无人机以多旋翼形态飞行,无人机执行第一飞行任务,所述第一飞行任务包括定点悬停、垂直起降、低速运动中的一种及其组合;
18、平飞机动工作模式下,无人机以固定翼形态飞行,无人机执行第二飞行任务,所述第二飞行任务包括加速、减速和定点巡航的一种及其组合;
19、过渡转换工作模式下,无人机以固定翼结合多旋翼的形态飞行。
20、进一步地,所述变距直驱混合动力复合翼垂起无人机在一次飞行任务过程中包括如下阶段:垂直起飞段,加速爬升段、定速巡航段、定点悬停段、低速运动段、平飞加速段、平飞减速段、减速下滑段、垂直降落段;
21、在垂直起飞段、定点悬停段、低速运动段和垂直降落段时,执行垂直机动工作模式;
22、在定速巡航段、平飞加速段和平飞减速段时,执行平飞机动工作模式下;
23、在加速爬升段和减速下滑段时,执行过渡转换工作模式。
24、进一步地,无人机以多旋翼形态飞行时,内燃机将自身不少于90%的功率传递至发电机,剩余功率传递至变距螺旋桨;
25、无人机以固定翼形态飞行时,内燃机将自身不少于50%的功率传递至变距螺旋桨,剩余功率传递至发电机。
26、本发明至少具有以下有益效果:
27、本发明设计了一种具备更长垂直机动时间、更高推进效率、更高能量利用率,更节能的混合动力无人机,此类飞行器具有更广泛的应用场景,能够推动中小型工业级无人机乃至无人行业的快速发展。在总体技术方案层面,本发明的提出能够为面向新一代无人业务的中小型工业级垂起固定翼无人机的设计与优化提供一种有效的、可靠的、正确的、稳定的方法
28、在单个技术层面:
29、一、所提出的变距直驱混合动力系统方案,充分考虑了复合翼垂起无人机布局特点,依据可靠方法设计了一种能够最大化发挥动力系统各动力设备的动力特性的拓扑结构,所提出的变距思想能够适配复合翼垂起无人机的多工作模式,将发动机转速稳定在经济区提高动力系统经济性。同时,油电混合动力系统提高了整机的动力冗余度,防止在单个动力源失效时飞行器面临危险条件,搭载此动力系统,能够有效提升复合翼垂起无人机稳定性、能量利用率、动力冗余度、航程航时等方面的性能表现,值得一提的是本发明所提出的同轴变距动力装置在解决复合翼垂起无人机飞行工况转换过程中的平滑过渡问题具有突出优势。
30、二、所提出的变距直驱混动复合翼垂起无人机设计方法能够为搭载变距直驱混合动力垂起无人机的设计提供有益参考,变距直驱混合动力复合翼垂起无人机所具备的长垂直机动时间与高效平飞性能使得此类无人机在面向未来不停机定点物流运输、长航时精准电力巡检等新一代无人业务的广泛应用场景中发挥重要作用。
- 还没有人留言评论。精彩留言会获得点赞!