一种系留无人机起落架自动收放装置及其控制方法与流程
本发明属于系留无人机起落架收放,具体涉及一种系留无人机起落架自动收放装置及其控制方法。
背景技术:
1、无人机(uav)是无人驾驶飞机(unmanned aerial vehicle)的简称,是21世纪高新技术迅速发展下的产物;其具有体积小、结构简单、使用成本低、易于控制等优点,能够在复杂危险的环境中工作。随着科学技术的发展和生产生活的需要,无人机被广泛应用在电力巡检、防灾救援、隧洞勘探等执行复杂任务的领域。但由于无人机受能源问题、无线干扰等限制,不能长时间滞空飞行,且无法携带较大功率的设备。在无线数据传输设备受到干扰时,无线数据传输速度受到限制,容易造成突发事故。为了解决上述问题,系留无人机应运而生。
2、系留无人机为多旋翼无人机的一种特殊形式,使用系留线缆传输的地面电源作为动力来源,以代替传统的锂电池,其特点是运行时间长、通信稳定性好。系留无人机由地面高压直流稳压系统、放线器、同步绕线轮、系留电缆、空中稳压模块和备用电池组成,高压直流稳压系统和同步绕线轮安装在放线器上,系留电缆与稳压模块和备用电池连接,很好地解决了无人机面临的长航时、高负载问题。然而,由于系留无人机工作环境复杂,无法始终保证降落面的平整,这大大降低了无人机升降的安全性和稳定性。此外,系留无人机的起落架与系留线缆难免会存在空间上的冲突,从而造成起落架收放失败。因此,设计一种系留无人机起落架自动收放装置及方法,实现复杂降落面的水平降落、尽可能避免系留线缆与起落架的冲突,是保证系留无人机安全稳定起落的重要研究内容。
3、现有的系留无人机起落架收放系统主要存在如下问题:
4、1、起落架收放单元只含有一套工作电机,工作电机故障将导致起落架收放系统故障,安全余度较低。
5、2、系留无人机工作环境复杂,无法始终保证降落面的平整,无人机升降的安全性和稳定性低。
6、3、起落架与系留线缆存在空间上的冲突,易出现起落架被系留线缆缠绕而导致收放失败的情况。
技术实现思路
1、针对于上述现有技术的不足,本发明的目的在于提供一种系留无人机起落架自动收放装置及其控制方法,以解决现有技术中系留无人机的起落架收放单元中只含有一套工作电机所造成的安全余度低和系留无人机在不平稳地面升降稳定性低的问题。
2、为达到上述目的,本发明采用的技术方案如下:
3、本发明的一种系留无人机起落架自动收放装置,包括:起落架收放单元和控制器;其中起落架收放单元的数量为四个;
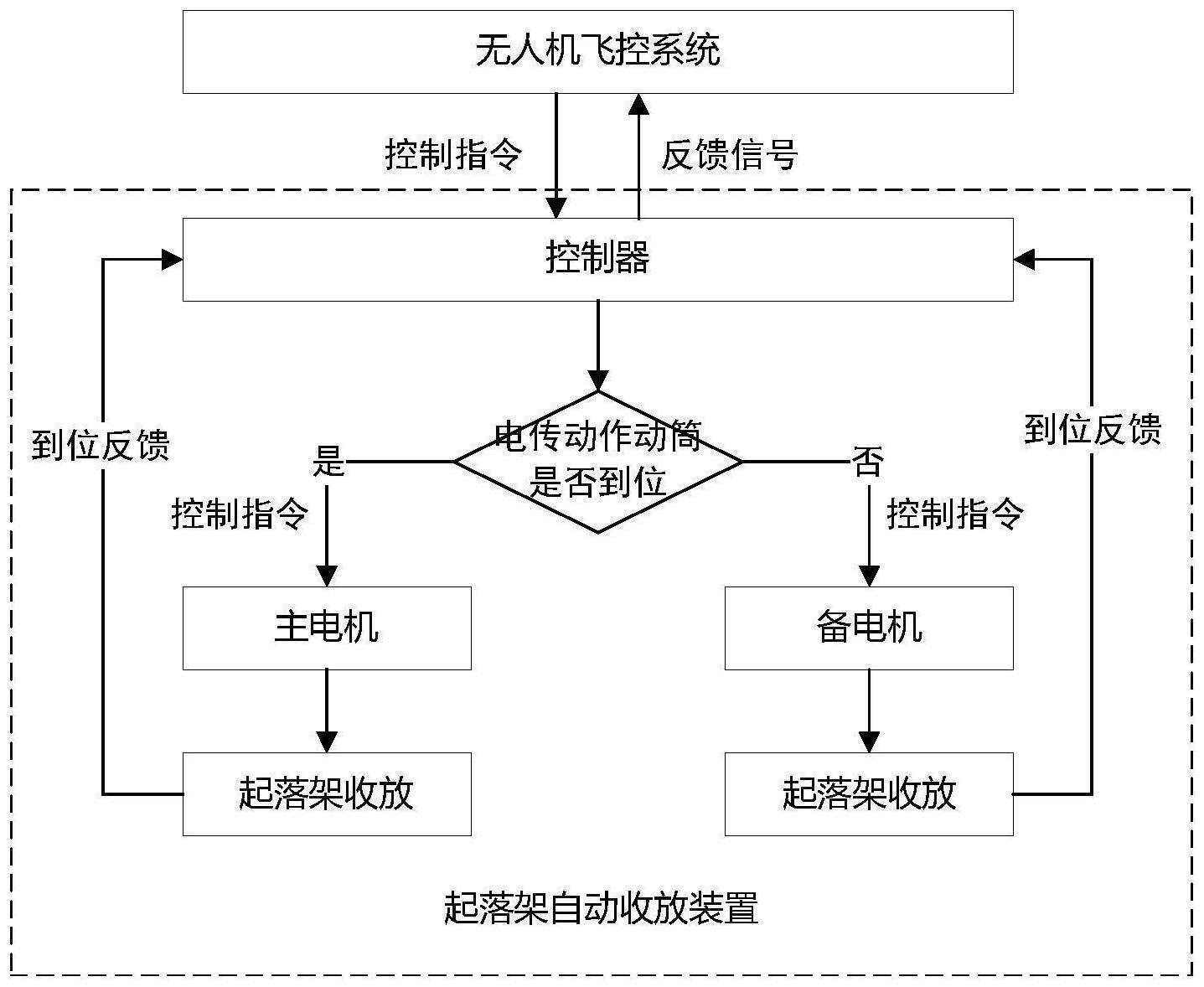
4、所述起落架收放单元包含超声波传感器、缓冲底座和电传动作动筒;所述超声波传感器安装于电传动作动筒的外壁上,用于采集各电传动作动筒距地面的距离,并将距离数据传输给控制器;缓冲底座设置于电传动作动筒的底部,用于无人机与地面接触时的缓冲;电传动作动筒设于无人机机体的下方,用于驱动缓冲底座的收放;所述电传动作动筒由下连接机构、主电机、备电机、主减速器、备减速器、上连接机构、活塞筒、活塞杆、到位检测装置、滚珠丝杠机构、齿轮传动机构组成;所述主电机、备电机、主减速器、备减速器固定于活塞筒的外侧,主电机的输出端连接主减速器,备电机的输出端连接备减速器,其中主电机和备电机型号完全一致且均安装了光电转速传感器;所述下连接机构、上连接机构分别位于活塞筒的下方和上方,下连接机构与缓冲底座连接,上连接机构与无人机机体连接;活塞杆、滚珠丝杠机构、齿轮传动机构安装于活塞筒的内部,活塞杆的下端固定连接下连接机构,活塞杆的上端连接滚珠丝杠机构中的螺母前端;滚珠丝杠机构的丝杠与齿轮传动机构的下端相结合,用于将齿轮传动机构的旋转运动转化为直线运动,以驱动活塞杆的收放;到位检测装置由压力传感器和固定支架组成,压力传感器通过固定支架安装于活塞筒的内部,活塞杆处于初始位置时,滚珠丝杠机构的螺母后端与压力传感器相接触;齿轮传动机构的上端分别连接主减速器、备减速器中的齿轮,用于将减速器的机械能传递给滚珠丝杠机构;
5、所述控制器与无人机飞控系统双向通信,并控制四个起落架收放单元的主电机、备电机,所述控制器还分别接收超声波传感器和压力传感器发出的信号数据。
6、进一步地,所述滚珠丝杠机构包含:丝杠、螺母、滚珠和滚珠回流管;齿轮传动机构连接滚珠丝杠机构中的丝杠,并驱动丝杠转动,丝杠与螺母上的半圆形螺旋槽组成截面为圆形的螺旋滚道,滚珠位于该螺旋滚道中;当丝杠旋转时,滚珠在螺旋滚道内滚动,驱动螺母直线运动,从而实现活塞杆的伸缩。
7、进一步地,所述丝杠一端设置于活塞杆中,二者相对滑动。
8、进一步地,所述主电机、备电机、主减速器、备减速器通过螺钉固定于活塞筒的外侧。
9、进一步地,所述活塞杆的下端通过螺钉固定连接下连接机构。
10、本发明的一种系留无人机起落架自动收放装置的控制方法,基于上述装置,步骤如下:
11、系留无人机起飞状态下:
12、1)无人机飞控系统接收到地面站发送的起飞指令后,无人机进入到起飞状态,控制器计算各电传动作动筒的工作时间;
13、2)当无人机离地到达一定距离后,控制器分别向各主电机发送控制指令,各主电机驱动对应电传动作动筒完成收入动作;当主电机故障时,控制器向备电机发送控制指令,备电机驱动电传动作动筒实现收入动作;
14、3)某个电传动作动筒完全收入时,对应的压力传感器向控制器发出完成收入信号,控制器控制该电传动作动筒对应的电机停止工作;
15、系留无人机降落状态下:
16、4)无人机飞控系统接收到地面站发送的降落指令后,无人机进入到降落状态,控制器计算各电传动作动筒的工作时间;
17、5)当无人机离地到达一定距离后,控制器分别向各电传动作动筒对应的主电机发送控制指令,主电机驱动电传动作动筒完成放出动作;当主电机故障时,控制器会向备电机发送控制指令,备电机驱动电传动作动筒实现放出动作;
18、6)各电传动作动筒对应的主电机工作tji时长后,活塞杆伸出到指定位置,控制器控制电传动作动筒对应的电机停止工作,电传动作动筒的放出过程结束。
19、进一步地,所述步骤1)中,无人机起飞过程中各电传动作动筒的工作时间tqi与该无人机是否存在上一次降落过程有关,tqi的计算公式如下:
20、
21、进一步地,所述步骤2)中,当无人机起飞离地到达一定距离后,控制器分别向各主电机发送tqi时长的控制信号,各主电机逆向转动,经主减速器后带动齿轮传动机构逆向转动,从而带动滚珠丝杠机构和活塞杆向内收入;若某个电传动作动筒对应的主电机发生停机故障,该主电机内部的光电转速传感器会向控制器发出故障信号;控制器接收到主电机故障信号后,向该电传动作动筒对应的备电机发送控制信号,以继续完成电传动作动筒向内收入。
22、进一步地,所述步骤4)中,无人机降落过程中,控制器通过以下步骤计算得出各电传动作动筒的工作时间tji,具体计算步骤如下:
23、41)求各电传动作动筒的最大离地距离d,计算公式如下:
24、d=max(d1,d2,d3,d4)
25、其中,d1,d2,d3,d4表示各电传动作动筒的离地距离;
26、42)计算各电传动作动筒离地距离di与最大离地距离d之间的差距di:
27、di=d-di i=1,2,3,4
28、43)计算各电传动作动筒伸出的长度xi:
29、xi=l-di i=1,2,3,4
30、其中,l表示电传动作动筒中活塞杆从初始位置到完全伸出的长度;
31、44)控制器将各电传动作动筒伸出的长度xi转化为各电传动作动筒对应电机工作的时间ti,转换公式如下:
32、
33、其中,k1表示电机转速与减速器转速的转换系数,k2表示丝杠结构中丝杠转速和螺母水平位移速度的转换系数,vi表示电机的工作转速;
34、45)对各电传动作动筒的工作时间tji进行存储,用于无人机起飞过程中读取。
35、进一步地,所述步骤2)中,当无人机降落至离地到达一定距离后,控制器分别向各电传动作动筒对应的主电机发送tji时长的控制信号,各主电机正向转动,经主减速器后带动齿轮传动机构正向转动,从而带动滚珠丝杠机构和活塞杆向外伸出;若某电传动作动筒对应的主电机发生停机故障,该主电机内部的光电转速传感器向控制器发出故障信号;控制器接收到主电机故障信号后,向该电传动作动筒对应的备电机发送控制信号,以继续完成电传动作动筒向外伸出。
36、本发明的有益效果:
37、本发明的装置可自动收放,减小了操作者控制无人机起降的操作难度;可以根据地面的平整情况来实时调整电传动作动筒的放出长度,实现无人机在复杂降落面的水平降落;垂直自动收放的电传动作动筒可以有效避免电传动作动筒与系留线缆的缠绕。
38、此外,本发明使用主、备两套控制装置,提高了无人机电传动作动筒收放的稳定性和安全余度。
- 还没有人留言评论。精彩留言会获得点赞!