太阳帆板驱动机构工作状态自主检测及异常处置方法及系统
本发明涉及航天器控制,具体而言涉及一种太阳帆板驱动机构工作状态自主检测及异常处置方法。
背景技术:
1、近年来,随着国内外多个低轨通信卫星星座计划的提出和卫星相继发射,地面测控中心需要同时维护的卫星数量越来越多。由于卫星轨道的空间环境比较恶劣,虽然星上设备研制时设计了相应防护措施,但也很难避免不出现在轨异常情况。若完全依靠地面测控中心判断和处置在轨的异常,由于测控弧段的限制,异常判断和处置的时效性难以保证。低轨通信卫星为了满足载荷工作的指向需求,同时保证能源供应,星上常会配置太阳帆板驱动机构,用于带动太阳帆板转动使其保持对日指向。一旦太阳帆板驱动机构在轨出现工作状态异常,若不能及时发现并处置,将可能会导致太阳帆板产生的电能下降,甚至危及整星能源安全。
技术实现思路
1、为了克服上述技术缺陷,本发明的第一个方面提供一种太阳帆板驱动机构工作状态自主检测及异常处置方法,其包括:
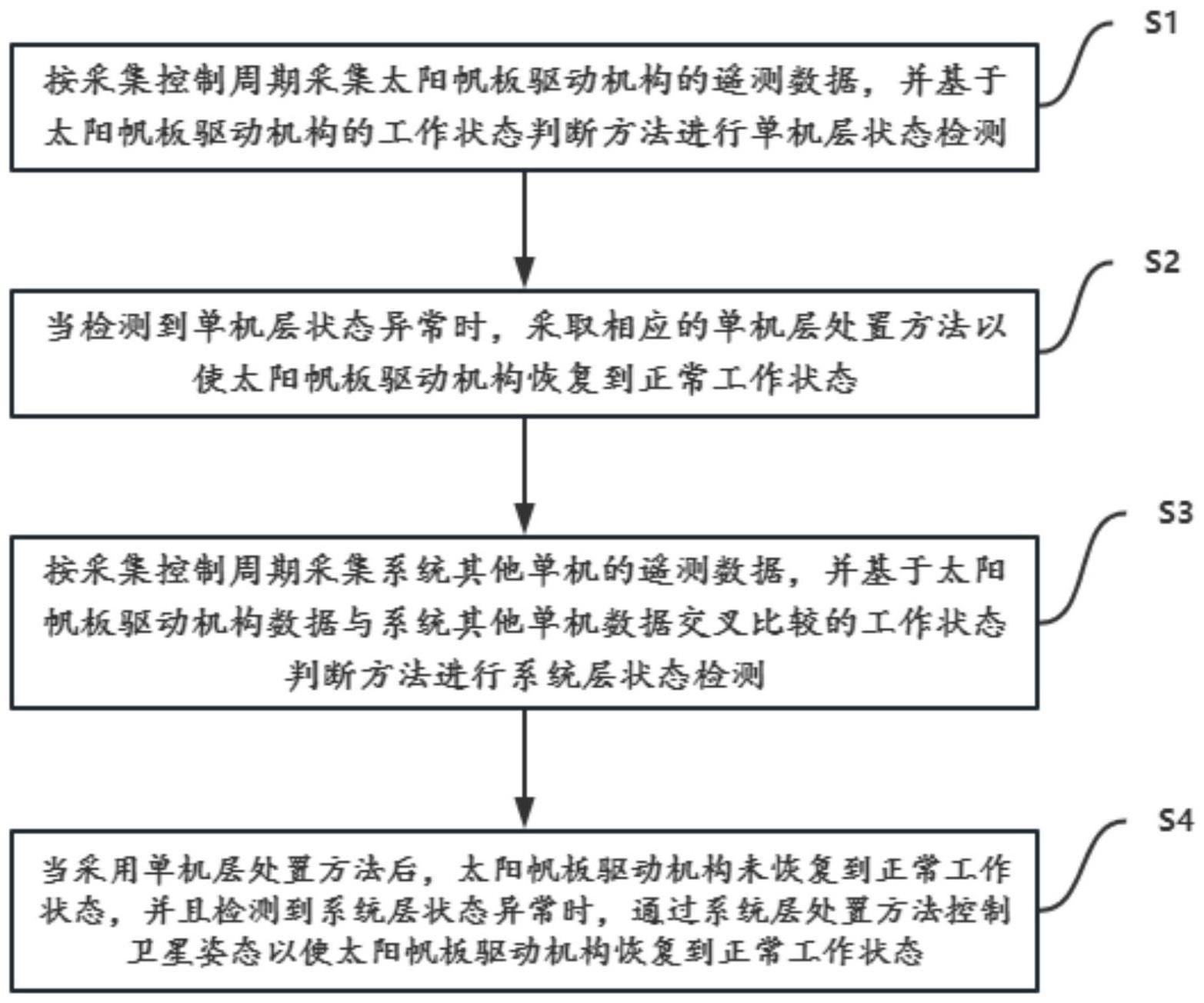
2、步骤s1:按采集控制周期采集太阳帆板驱动机构的遥测数据,并基于太阳帆板驱动机构的工作状态判断方法进行单机层状态检测;
3、步骤s2:当检测到单机层状态异常时,采取相应的单机层处置方法以使太阳帆板驱动机构恢复到正常工作状态。
4、进一步地,在步骤s1中,所述遥测数据包括工作电压v、工作电流i、转动机构温度t、软件计数角度θs和电位计测量角度θdwj,所述太阳帆板驱动机构工作状态判断方法包括:
5、(1)数据采集状态的判断:太阳帆板驱动机构上电后,若星载计算机连续n1个采集控制周期采集到的太阳帆板驱动机构的遥测数据源码均无变化或者未采集到太阳帆板驱动机构的遥测数据,则判定数据采集状态异常,并按采集控制周期将数据采集异常计数countercj+1;否则,判定数据采集状态正常,将countercj置零;
6、(2)工作电压状态的判断:当数据采集状态为正常且工作电压v连续n2个采集控制周期均不在区间[(1-δ1)v0,(1+δ2)v0]时,则判定工作电压状态异常;否则,判定工作电压状态为正常;
7、(3)工作电流状态的判断:当数据采集状态为正常且太阳帆板驱动机构转动时的工作电流i连续n3个采集控制周期均不在区间[(1-δ3)i0,(1+δ4)i0]时,则判定工作电流状态异常;否则,判定工作电流状态为正常;
8、(4)工作温度状态的判断:当数据采集状态为正常且转动机构温度t连续n4个采集控制周期超过tm+δt1或者温度上升超过δt2时,则判定工作温度状态异常;否则,判定工作温度状态为正常;
9、(5)测角状态的判断:当数据采集状态为正常且驱动机构的软件计数角度θs与电位计测量角度θdwj差值的绝对值连续n5个采集控制周期大于δ5时,则判定测角状态异常;否则,判定测角状态正常;
10、(6)零位状态的判断:当驱动机构处在跟踪模式进行对日指向时,若软件计数角度θs>(360°+δ6)时,仍未触发软件计数角度清零时,则判定零位状态异常;否则,判定零位状态正常;
11、其中,n1,n2,n3,n4,n5为计数阈值,取整数,为避免单次采集数据影响判断,取值要求大于1;δ1,δ2,δ3,δ4为电压和电流波动百分比,根据工作电压及电流的波动范围选择,取值范围为(0,1);tm为转动机构工作温度设计上限,δt1,δt2为驱动机构短时可允许的温度波动阈值,δt1>0,δt2>0;δ5为测角状态判断阈值,取值应大于电位计测角精度,δ5>0;δ6为零位状态判断角度阈值,δ6>0;v0表示驱动机构正常工作时工作电压设计值;i0表示驱动机构正常工作时的工作电流设计值;t1、t2为驱动机构短时可允许的温度波动阈值;
12、当数据采集状态、工作电压状态、工作电流状态、工作温度状态、测角状态、零位状态中的一个或多个存在异常时,则判断为太阳帆板驱动机构工作状态异常。
13、进一步地,在步骤s2中,所述相应的单机层处置方法包括:
14、(1)当数据采集状态异常,或者工作电压状态异常,或者工作电流状态异常或者工作温度状态异常时,星载计算机程控发送驱动机构进入待机模式指令,停止驱动机构转动;
15、(2)当测角状态异常,或者零位状态异常时,星载计算机程控发送驱动机构进入回零模式指令,使驱动机构先转动回到零位,校正软件计数角度;当测角状态正常且零位状态正常后,再恢复到跟踪模式以对日指向;
16、(3)当转动状态异常且转动状态异常计数counterdr<cdr3时,星载计算机先程控发送驱动机构进入回零模式指令,校正软件计数角度;当完成软件计数角度校正后再发送驱动机构进入跟踪模式指令,重新使太阳帆板驱动机构实现对日指向。
17、(4)当驱动机构进入回零模式后,在驱动机构未完成回零之前,按采集控制周期将回零时间计数counterzero+1;驱动机构完成回零时,将counterzero清零;
18、(5)当工作电流状态与工作温度状态均异常时,星载计算机程控发送太阳帆板驱动机构复位指令;
19、(6)当计数满足:ccj1<countercj<ccj2,或者cdr1<counterdr<cdr2,或者czero1<counterzero<czero2时,星载计算机程控发送太阳帆板驱动机构复位指令;
20、(7)当计数满足:ccj2<countercj<ccj3,或者cdr2<counterdr<cdr3,或者czero2<counterzero<czero3时,星载计算机程控发送太阳帆板驱动机构主备机切换指令,即若当前为主机加电工作时,则对主机断电,备机加电,切换成备机工作;若当前为备机加电工作时,则对备机断电,主机加电,切换成主机工作;
21、(8)当计数满足:countercj>ccj3,或者counterdr>cdr3,或者counterzero>czero3时,星载计算机停止太阳帆板驱动机构复位或主备机切换操作;
22、其中,ccj1,ccj2,ccj3为数据采集状态异常处置计数阈值,ccj3>ccj2>ccj1>0;cdr1,cdr2,cdr3为转动状态异常计数阈值,cdr3>cdr2>cdr1>0;czero1,czero2,czero3为判断回零异常的计数阈值,取值上czero3>3×360°/(ω0t),czero2>2×360°/(ω0t),czero1>360°/(ω0t);ω0为驱动机构回零模式下的转动角速度值,t为采集控制周期。
23、进一步地,太阳帆板驱动机构工作状态自主检测及异常处置方法进一步包括:
24、步骤s3:按采集控制周期采集系统其他单机的遥测数据,并基于太阳帆板驱动机构数据与系统其他单机数据交叉比较的工作状态判断方法进行系统层状态检测;
25、步骤s4:当采用单机层处置方法后,太阳帆板驱动机构未恢复到正常工作状态,并且检测到系统层状态异常时,通过系统层处置方法控制卫星姿态以使太阳帆板驱动机构恢复到正常工作状态。
26、进一步地,在步骤s3中,所述太阳帆板驱动机构数据与系统其他单机数据交叉比较的工作状态判断方法包括:
27、(1)基于太阳帆板上安装的太阳敏感器数据及卫星本体系太阳矢量数据比较判断太阳帆板驱动机构转动状态:
28、在光照区由太阳帆板上太阳敏感器数据及太阳帆板驱动机构的转动角度计算太阳矢量s′b如下:
29、s′b=rbmrmlsl
30、再计算s′b与卫星本体坐标系中太阳矢量sb之间的夹角δ的余弦值:
31、
32、若连续n6个采集控制周期均有cosδ<λ,则判定太阳帆板驱动机构转动状态异常,并按周期将转动状态异常计数counterdr+1;否则,按周期将转动状态异常计数counterdr-1;
33、其中,sl由太阳帆板上太阳敏感器数据得到的太阳敏感器坐标系下太阳矢量,维数1*3;sb可由卫星本体上太阳敏感器数据得到或者通过卫星姿态计算得到,维数1*3;rml为太阳敏感器相对太阳帆板的安装矩阵,维数3*3;rbm为由太阳帆板驱动机构转角计算得到的太阳帆板相对卫星本体坐标系的转换矩阵,维数3*3;n6为计数阈值,取整数,n6>1;λ为夹角的余弦阈值,0<λ<1;||表示对矢量求模值;
34、(2)基于太阳帆板上产生的电流及卫星本体系太阳矢量数据比较判断太阳帆板驱动机构转动状态:
35、在光照区计算当前太阳帆板驱动机构转动角度下太阳帆板产生的理论电流值id,计算公式如下:
36、lb=rbm·lm
37、
38、再计算太阳帆板上产生的电流值ib与太阳帆板产生的理论电流值id之间的百分比偏差η:
39、
40、若连续n7个采集周期有|η|>η0,则判定太阳帆板驱动机构转动状态异常,并按周期将转动状态异常计数counterdr+1;否则,按周期将转动状态异常计数counterdr-1;
41、其中,lb是根据当前太阳帆板驱动机构转动角度计算得到的卫星本体坐标系下太阳帆板法线矢量;lm为太阳帆板上电池片的法线矢量,维数1*3;im为太阳光垂直照射太阳帆板平面时太阳帆板可产生的最大电流;n7为计数阈值,取整数,n7>1;η0为电流差的百分比阈值,0<η0<1。
42、进一步地,在步骤s4中,所述系统层处置方法包括:
43、(1)当countercj>ccj3时,星载计算机程控发送驱动机构进入待机模式指令,停止驱动机构转动;同时星载计算机根据当前太阳帆板的法线位置矢量控制卫星姿态,通过转动卫星完成太阳帆板对日指向;
44、(2)否则,当counterzero>czero3时,星载计算机程控发送驱动机构进入待机模式指令,停止驱动机构转动,同时星载计算机根据当前太阳帆板的法线位置矢量控制卫星姿态,通过转动卫星完成太阳帆板对日指向;
45、(3)否则,当counterdr>cdr3时,星载计算机程控发送驱动机构进入回零模式指令,使驱动机构回到零位;同时星载计算机根据太阳帆板驱动机构在零位时太阳帆板的法线位置矢量控制卫星姿态,通过转动卫星完成太阳帆板对日指向。
46、本技术的第二个方面提供一种太阳帆板驱动机构工作状态自主检测及异常处置系统,其包括:
47、单机层状态检测模块,所述单机层状态检测模块被配置为按采集控制周期采集太阳帆板驱动机构的遥测数据,并基于太阳帆板驱动机构的工作状态判断方法进行单机层状态检测;
48、单机层处置模块,所述单机层处置模块被配置为当检测到单机层状态异常时,采取相应的单机层处置方法以使太阳帆板驱动机构恢复到正常工作状态。
49、进一步地,太阳帆板驱动机构工作状态自主检测及异常处置系统进一步包括:
50、系统层状态检测模块,所述系统层状态检测模块被配置为按采集控制周期采集系统其他单机的遥测数据,并基于太阳帆板驱动机构数据与系统其他单机数据交叉比较的工作状态判断方法进行系统层状态检测;
51、系统层处置模块,所述系统层处置模块被配置为当采用单机层处置方法后,太阳帆板驱动机构未恢复到正常工作状态,并且检测到系统层状态异常时,通过系统层处置方法控制卫星姿态以使太阳帆板驱动机构恢复到正常工作状态。
52、本技术的第三个方面提供一种电子设备,其包括存储器和处理器以及存储在存储器上并在处理器上运行的计算机指令,所述计算机指令被处理器运行时,完成上述太阳帆板驱动机构工作状态自主检测及异常处置方法。
53、本技术的第四个方面提供一种计算机可读存储介质,其用于存储计算机指令,所述计算机指令被处理器执行时,完成上述太阳帆板驱动机构工作状态自主检测及异常处置方法。
54、采用了上述技术方案后,与现有技术相比,具有以下有益效果:
55、本发明的太阳帆板驱动机构工作状态的自主检测和异常时的处置方法基于太阳帆板驱动机构自身的状态数据,星上敏感器数据和太阳帆板产生的电流等数据,根据星上可实施的太阳帆板驱动机构工作状态判断方法,并针对异常状态提供了一套星上可实施的异常应对处置方法,以实现星上及时自主地完成太阳帆板驱动机构异常状态判定和处置,降低因太阳帆板驱动机构工作状态异常带来的卫星能源不足地风险。
- 还没有人留言评论。精彩留言会获得点赞!