一种多功能无人车的制作方法
本发明属于无人车,特别涉及一种多功能无人车。
背景技术:
1、随着无人驾驶技术发展,无人巡逻车成为各个科技公司争相研发的对象,但是无人巡逻车结构简单,机动性能差,应用场景单一,不能适应多种场景下的无人巡逻任务,急需要一种多范围,空地协同一体的无人设备。
2、然而现有大型轮式机器人,由于其内置传感器单一,造成应用场景受限;故亟需一种多功能的同时具有机动性能强的轮式机器人,来走进人们的生活。
技术实现思路
1、为了解决现有技术存在的上述问题,本发明的目的在于提供一种地空协同作业、可实现无人机快速起降且准确锁紧定位的多功能无人车。
2、本发明所采用的技术方案为:
3、一种多功能无人车,包括车框架组件,车框架组件上分别安装有转向系统、前悬挂系统、后悬挂系统,转向系统的输出端与前悬挂系统连接;所述车框架组件上还连接有运动机构,运动机构的输出端连接有停机坪,运动机构推出或收回停机坪,停机坪上停放无人机,停机坪上安装有用于对无人机充电的充电触点和用于对无人机锁紧和定位的锁紧机构。
4、本发明的转向系统驱动前悬挂系统,后悬挂系统提供无人车前进动力。本发明的无人车搭载无人机,可实现地空协同作业。运动机构可将停机坪推出后收回,从而避免无人机起降过程中,无人车的其它结构阻挡无人机,可实现无人机快速起降。锁紧机构能将无人机锁紧并准确定位,保证无人机得到可靠充电。
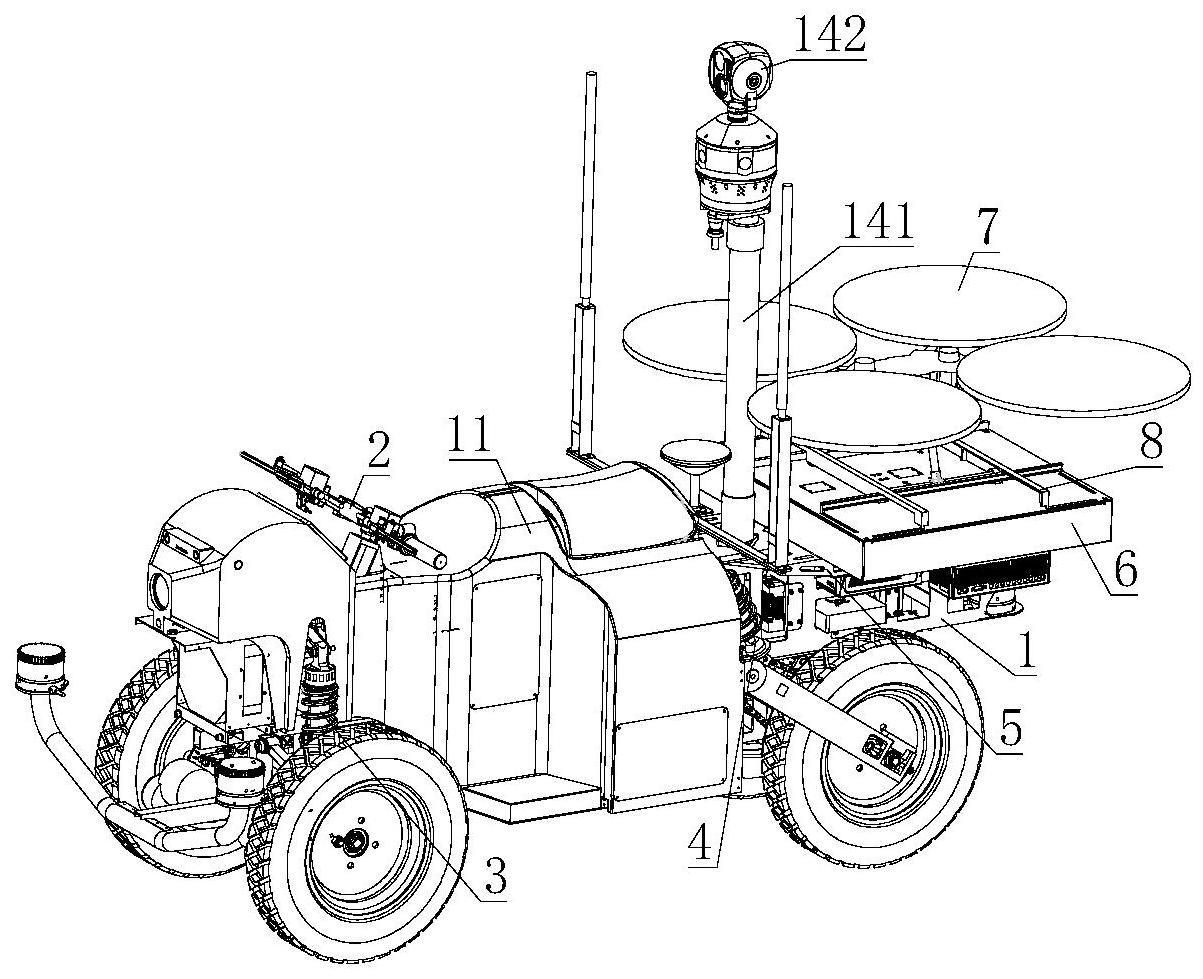
5、作为本发明的优选方案,所述车框架组件上连接有车外壳,车外壳上分别安装有双目相机、鱼眼相机;所述车框架组件包括车架,车架上分别安装有天线、激光雷达、强声器、屏幕和陀螺仪,车架上还通过升降杆连接有声光一体监控设备。本发明的无人车搭载多种传感器及其它设备,能够应对各种复杂环境。
6、作为本发明的优选方案,所述转向系统包括连接于车框架组件上的转向架,转向架上转动连接有转向驱动轴,转向驱动轴上连接有转向叉,转向叉通过转向连杆与前悬挂系统转动连接;所述转向驱动轴的一端连接有电子转向助力电机,转向驱动轴的另一端连接有转向齿轮,转向齿轮传动连接有十字转向节,十字转向节传动连接有转向拉杆,转向拉杆的另一端连接有转把,十字转向节和转向拉杆安装于转向架上。
7、在人工驾驶状态下,驾驶者操作转把,转把带动转向拉杆转动,转向拉杆通过十字转向节驱动转向齿轮转动,从而转向驱动轴带动转向叉转动。转向叉通过转向连杆带动前悬挂系统倾转,实现无人车转向。在自动或者遥控驾驶状态下,电子转向助力电机驱动转向驱动轴转动,从而本发明能实现自动或遥控或人工驾驶。该转向系统结构紧凑,转向灵活。
8、作为本发明的优选方案,所述前悬挂系统包括分别与车框架组件和转向系统转动连接的转向机构,转向机构与车框架组件之间连接有前悬挂,转向机构上转动连接有轮毂传动轴,轮毂传动轴上转动连接有前轮胎,转向机构上还安装有前辅助驱动机构,前辅助驱动机构包括固定于转向机构上的电机固定座,电机固定座上安装有辅助电机,辅助电机的转动轴上连接有单向轴承,单向轴承与轮毂传动轴之间连接有传动机构。
9、辅助电机的转动轴与传动机构之间连接单向轴承,从而辅助电机的转动轴能将动力通过单向轴承传递给传动机构,而传动机构不能将动力传递给辅助电机。在爬坡以及越障等需要高扭矩输出时,单向轴承的棘轮啮合,辅助电机的转动轴通过单向轴承将动力传递给传动机构,传动机构驱动轮毂传动轴和前轮胎转动,从而通过增加辅助电机,增强整车动力特性。在平路运转时,单向轴承的棘轮不啮合,传动机构无法将动力通过单向轴承传递到辅助电机,减少行进阻力。
10、作为本发明的优选方案,所述后悬挂系统包括转动连接于车框架组件上的后轮支架,后轮支架与车框架组件之间连接有后悬挂,车框架组件上安装有主电机,主电机的输出端连接有驱动轴,驱动轴与后轮支架转动连接,驱动轴上连接有后小链轮;还包括心轴,心轴上转动连接有转动法兰组件,转动法兰组件上安装有后轮胎和后大链轮,后小链轮与后大链轮通过链条传动连接。
11、主电机带动驱动轴转动时,驱动轴上的后小链轮通过链条驱动后大链轮转动,从而转动法兰组件带动后轮胎转动。本发明通过后链条传动来驱动后轮胎,从而无人车移动,可传递较大扭矩,并且结构较为简单。
12、作为本发明的优选方案,所述运动机构包括安装平台,安装平台上安装有推举机构;所述推举机构包括转动连接于安装平台上的电动推杆,电动推杆的活塞杆上转动连接有中间轴,中间轴的两端均铰接有横向连杆,横向连杆的两端均铰接有纵向连杆,纵向连杆的一端与安装平台铰接,纵向连杆的另一端与停机坪铰接。
13、停机坪、安装平台和同侧的两根纵向连杆之间组成四边形结构,从而中间轴的两侧分别具有一个四边形结构,两个四边形结构使得停机坪得到稳定支撑。电动推杆通过中间轴控制两个四边形结构变形,从而停机坪能被斜向推出或收回。当停机坪被推出时,停机坪避开了无人车的其它结构,方便无人机起降,夹块起降时间。当停机坪被收回时,停机坪和无人机能靠近无人车其它结构,从而使无人车结构紧凑。
14、作为本发明的优选方案,所述锁紧机构设置于停机坪上的两根横向运动杆和两根纵向运动杆,两根横向运动杆和两根纵向运动杆同步向中心收拢或同步向外分散,两根横向运动杆和两根纵向运动杆连接有锁紧驱动机构;所述停机坪上设置有若干横向布置和若干纵向布置的限位槽,横向运动杆连接横向传动螺母的一端穿过横向布置的限位槽,纵向传动杆穿过纵向布置的限位槽。
15、锁紧驱动机构驱动两根横向运动杆和两根纵向运动杆同步移动。两根横向运动杆和两根纵向运动杆同步向中心收拢时,将无人机的底部从四个方向锁紧。横向布置的限位槽对横向运动杆进行限位,纵向布置的限位槽对纵向运动杆进行限位,且当两根横向运动杆和两根纵向运动杆由一个锁紧驱动机构驱动时,可设置两根横向运动杆和两根纵向运动杆同时到达锁紧极限位置。从而,两根横向运动杆和两根纵向运动杆从四个方向对无人机的底部进行准确限位。在两根横向运动杆和两根纵向运动杆锁紧极限位置所限定的空间内,对应无人机的每个充电头设置充电触点,以使无人机得到精确锁紧定位时,每个充电头均得到可靠充电。
16、作为本发明的优选方案,所述无人机的起落架上安装有充电头,充电头包括充电固定座,充电固定座的下侧连接有弹簧,弹簧的另一端连接有充电铜片。停机坪上的充电触点与充电铜片匹配,停机坪上还设置有用于将充电头压紧的顶板。
17、顶板将充电固定座压紧,从而弹簧被压缩,充电铜片与停机坪上的充电触点压紧,保证可靠充电。当无人机起飞时,顶板移开,充电铜片可与充电触点顺利分离,避免充电装置对无人机的起降造成影响。
18、作为本发明的优选方案,所述顶板的底面为斜面,充电固定座顶部的一侧为斜面;锁紧无人机时,充电固定座的斜面与顶板的斜面压紧。当顶板的底面和充电头的一侧均为斜面时,顶板朝向充电头移动过程中,顶板的斜面逐步将充电头的斜面压紧,进一步提高充电铜片与充电触点接触效果。
19、作为本发明的优选方案,所述车框架组件内还设置有电池快拆机构,电池快拆机构包括安装底架,安装底架上连接有安装框架,安装底架的入口侧连接有导入底架,安装底架远离导入底架的一侧安装有限位块,导入底架上可拆卸连接有用于顶紧电池的固定组件,电池安装于安装底架、安装框架、限位块和固定组件之间。
20、导入底架能将电池顺利导入安装底架、安装框架、限位块所限定的空间,并由固定组件压紧,快拆结构简单,电池拆装方便。固定组件与导入底架可拆卸连接,当方便不同尺寸的电池时,可更换相应尺寸的固定组件,保证不同尺寸的电池均能被可靠固定,且可实现快速拆装。
21、本发明的有益效果为:
22、本发明的转向系统驱动前悬挂系统,后悬挂系统提供无人车前进动力。本发明的无人车搭载无人机,可实现地空协同作业。运动机构可将停机坪推出后收回,从而避免无人机起降过程中,无人车的其它结构阻挡无人机,可实现无人机快速起降。锁紧机构能将无人机锁紧并准确定位,保证无人机得到可靠充电。
- 还没有人留言评论。精彩留言会获得点赞!