一种变电站空陆两栖驱鸟机器人的制作方法
本发明涉及变电站安全防护,尤其涉及一种变电站空陆两栖驱鸟机器人。
背景技术:
1、随着我国经济发展,电力能源在人们的生产与生活中起到不容忽视的作用,变电站的建设也因人们对电力能源的需求得到了极大的推动。鸟害故障作为变电站常见的故障类型,其不仅会对电力网络的正常运行产生影响,同时也会促使电力部门产生不必要的财力、物力与人力损失。因此,驱鸟工作成为变电站建设与后期运维中的重点,对整个电网运行的稳定性与安全性都能够产生重要的影响。鸟害已到了非治理不可的地步。
2、近年国内大批科研机构研制了多种利用物理化学方法进行驱鸟的装置,如智能语音驱鸟器,采用数字语音存储技术,形成针对不同鸟类的声音芯片库,按照随即播放顺序、频率等方式播放高保真声音,实现鸟类驱赶作用,长时间运行鸟儿会适应,驱鸟效果会减弱。或者利用超声波脉冲干扰刺激和破坏鸟类神经系统、生理系统,使其生理紊乱以达到驱鸟、灭鸟的最终目的效果,但是由于生态保护和动物权益,该方法不易大面积推广。所以变电站驱鸟亟需一种生态、高效、低损耗的驱鸟装置。
3、为此,提出一种变电站空陆两栖驱鸟机器人。
技术实现思路
1、本发明的目的在于提供一种变电站空陆两栖驱鸟机器人,通过设置飞行器以及捕鸟机械手,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:
3、一种变电站空陆两栖驱鸟机器人,包括飞行器和全向移动作业底盘,所述飞行器可拆卸连接在全向移动作业底盘上,所述飞行器上设置有捕鸟机械手,所述飞行器内设有动力装置,所述飞行器上固定安装有摄像装置。
4、优选的,所述飞行器包括,飞行器外壳、摄像机座和摄像装置,所述摄像机座位于飞行器下部分,并固定安装在飞行器外壳上,所述摄像装置固定连接在摄像基座内,所述动力装置设置在飞行器外壳内,所述捕鸟机械手设置在飞行器外壳的内部,并从延伸至飞行器外壳侧面。
5、优选的,所述动力装置包括飞行器扇叶、飞行器电动机、扇叶罩,所述飞行器扇叶设置有四个并与所述飞行器顶部均匀分布,所述扇叶罩罩在飞行器扇叶上方用于保护飞行器扇叶,所述扇叶罩固定连接在飞行器上,飞行器电动机固定连接在飞行器上,且飞行器电动机输出端与飞行器扇叶固定连接。
6、优选的,所述全向移动作业底盘包括麦克纳姆轮、减震悬挂装置、移动电动机,所述减震悬挂装置包括弹簧、地盘亚克力减震上板、电机底板、合页,弹簧与地盘亚克力减震上板以及电机底板固定连接,地盘亚克力减震上板与电机底板的连接处设置有合页,移动电动机固定连接在电机底板上,所述麦克纳姆轮设有四个安装在整机底部,并于移动电动机的输出端固定连接。
7、优选的,捕鸟机械手包括电动推杆、捕鸟机械爪、推杆,所述捕鸟机械爪为上、下两段并采用铰链连接,所述上段的一端与飞行器转动连接,所述下段的一端连接有捕鸟机械爪,所述电动推杆的非输出端转动连接在飞行器上,输出端转动连接在下段上。
8、与现有技术相比,本发明的有益效果为:
9、1、本发明所述的一种新型变电站空陆两栖驱鸟机器人通过飞行器带动飞行,可实现任意角度转弯,可快速调整位置,完成工作。
10、2、本发明所述的一种新型变电站空陆两栖驱鸟机器人通过设有摄像装置,操作者可以清楚观测。
11、3、本发明所述的一种新型变电站空陆两栖驱鸟机器人通过设置全向移动作业底盘,可以灵活移动,且结构简单,便于安装和拆卸。
技术特征:
1.一种变电站空陆两栖驱鸟机器人,其特征在于:包括飞行器和全向移动作业底盘,所述飞行器可拆卸连接在全向移动作业底盘上,所述飞行器上设置有捕鸟机械手(1),所述飞行器内设有动力装置,所述飞行器上固定安装有摄像装置(4)。
2.根据权利要求1所述的一种变电站空陆两栖驱鸟机器人,其特征在于:所述飞行器包括,飞行器外壳(2)、摄像机座(3)和摄像装置(4),所述摄像机座(3)位于飞行器下部分,并固定安装在飞行器外壳(2)上,所述摄像装置(4)固定连接在摄像基座内,所述动力装置设置在飞行器外壳(2)内,所述捕鸟机械手(1)设置在飞行器外壳(2)的内部,并从延伸至飞行器外壳(2)侧面。
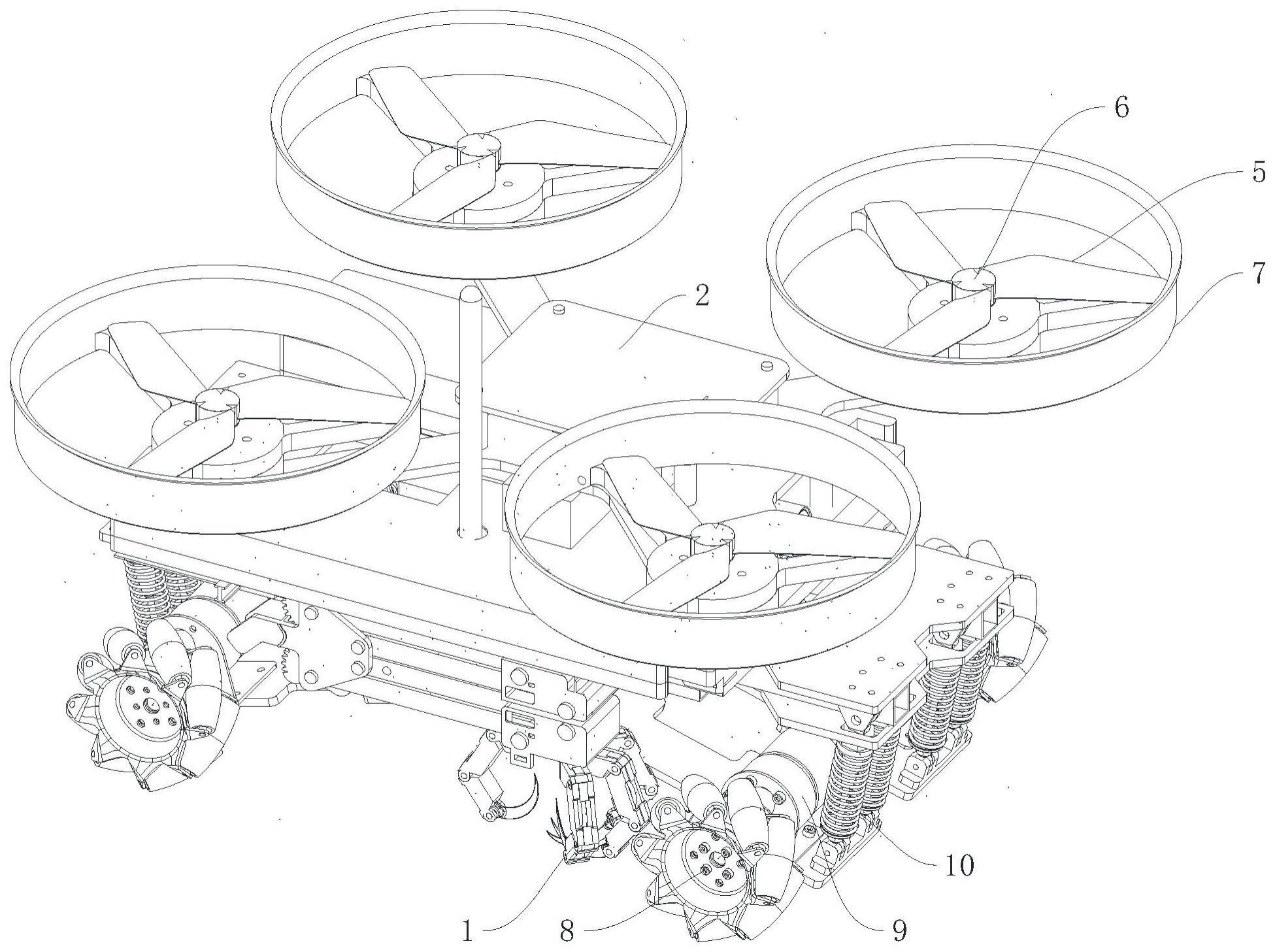
3.根据权利要求1或2所述的一种变电站空陆两栖驱鸟机器人,其特征在于:所述动力装置包括飞行器扇叶(5)、飞行器电动机(6)、扇叶罩(7),所述飞行器扇叶(5)设置有四个并与所述飞行器顶部均匀分布,所述扇叶罩(7)罩在飞行器扇叶(5)上方用于保护飞行器扇叶(5),所述扇叶罩(7)固定连接在飞行器上,飞行器电动机(6)固定连接在飞行器上,且飞行器电动机(6)输出端与飞行器扇叶(5)固定连接。
4.根据权利要求1所述的一种变电站空陆两栖驱鸟机器人,其特征在于:所述全向移动作业底盘包括麦克纳姆轮(8)、减震悬挂装置、移动电动机(9),所述减震悬挂装置包括弹簧(10)、地盘亚克力减震上板(11)、电机底板(12)、合页(13),弹簧(10)与地盘亚克力减震上板(11)以及电机底板(12)固定连接,地盘亚克力减震上板(11)与电机底板(12)的连接处设置有合页(13),移动电动机(9)固定连接在电机底板(12)上,所述麦克纳姆轮(8)设有四个安装在整机底部,并于移动电动机(9)的输出端固定连接。
5.根据权利要求1或2所述的一种变电站空陆两栖驱鸟机器人,其特征在于:捕鸟机械手(1)包括电动推杆(14)、捕鸟机械爪(15)、推杆,所述捕鸟机械爪(15)为上、下两段并采用铰链连接,所述上段(16)的一端与飞行器转动连接,所述下段(17)的一端连接有捕鸟机械爪(15),所述电动推杆(14)的非输出端转动连接在飞行器上,输出端转动连接在下段(17)上。
技术总结
本发明涉及变电站安全防护技术领域,尤其涉及一种变电站空陆两栖驱鸟机器人,具体为一种变电站空陆两栖驱鸟机器人,包括飞行器和全向移动作业底盘,所述飞行器可拆卸连接在全向移动作业底盘上,所述飞行器上设置有捕鸟机械手,所述飞行器内设有动力装置,所述飞行器上固定安装有摄像装置。本发明所述的一种新型变电站空陆两栖驱鸟机器人通过飞行器带动飞行,可实现任意角度转弯,可快速调整位置,完成工作。本发明所述的一种新型变电站空陆两栖驱鸟机器人通过设有摄像装置,操作者可以清楚观测。本发明所述的一种新型变电站空陆两栖驱鸟机器人通过设置全向移动作业底盘,可以灵活移动,且结构简单,便于安装和拆卸。
技术研发人员:王斌,国家栋,梁元清,黄厚鑫,陈绍南,郭丽娟,于树海,苏淑敏,孙睿,杜珂,庞海,罗喜,张豫鹏,黄增柯,郭嘉,张杰,刘帅
受保护的技术使用者:广西电网有限责任公司南宁供电局
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!