一种多旋翼飞行器及飞行控制方法、系统、存储介质与流程
本技术涉及飞行器控制,尤其是涉及一种多旋翼飞行器及飞行控制方法、系统、存储介质。
背景技术:
1、飞行控制算法是现代航空技术中的重要组成部分。它不仅仅可以应用于有人驾驶的飞机,也可以应用于无人机等各种飞行器中。飞行控制算法通过对飞行器的运动进行建模和控制,从而实现飞行器的精确控制和稳定飞行。目前,飞行控制算法已经成为航空技术的一个重要研究领域,各国的航空公司和研究机构都在积极开展相关研究。
2、传统的四旋翼飞行器的飞行控制算法的可靠性非常高,可以在各种环境下控制四旋翼飞行器实现稳定飞行。但是,传统的四旋翼飞行算法的精度相对较低,难以实现对四旋翼飞行器姿态的细微控制,因此无法满足某些高精度应用场景的需求。
3、另外,现有的八旋翼飞行控制算法,整体可实现相较四旋翼更加优秀的姿态控制表现,但为满足八个旋翼系统螺旋桨平面布置不出现干涉的要求,整体机身需设计的很大,机身中央的空间会出现浪费,同时整体结构重量占动力系统输出推力的比值更高,降低了八旋翼飞行器的整体飞行效率。
技术实现思路
1、为了弥补现有技术的不足,本技术提供一种多旋翼飞行器及飞行控制方法、系统、存储介质。
2、第一方面,本技术提供的一种多旋翼飞行器采用如下技术方案:
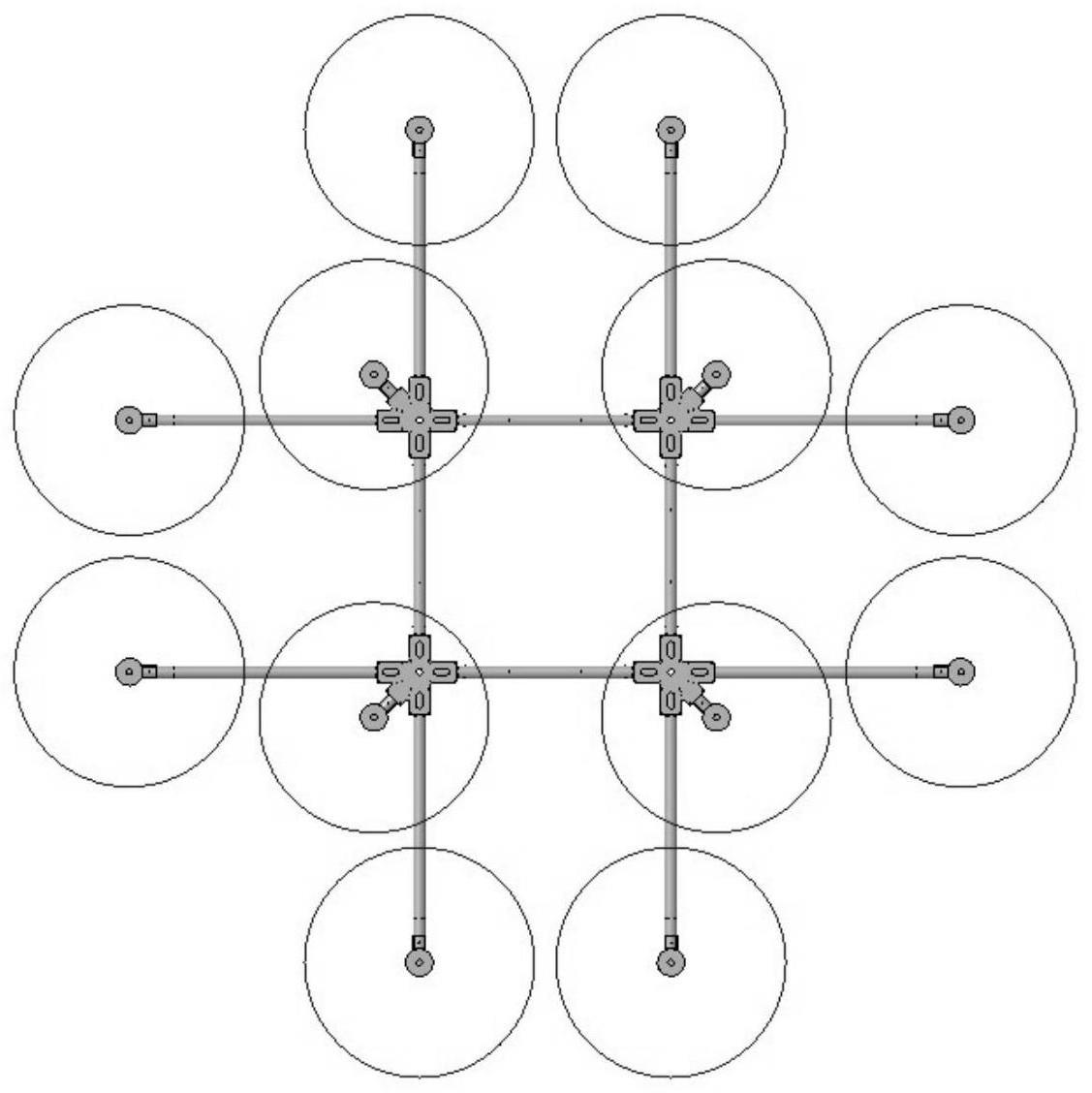
3、一种多旋翼飞行器,所述的多旋翼飞行器采用12个旋翼平面排布,其中,外环设置八个旋翼,内环设置四个旋翼;所述内环的四个旋翼与机身中心的距离相同并在所形成的圆形上均匀分布,在所述四个旋翼处分别设置一个电机和一个螺旋桨;所述外环的八个旋翼与机身中心的距离相同并在所形成的圆形上均匀分布,在所述八个旋翼处分别设置一个电机和一个螺旋桨。
4、通过采用上述技术方案,在八旋翼飞行器中央增加一套四旋翼系统参与控制,从而在不增大机身的情况下同时能够提升飞行效率和控制性能,即实现了更加优秀的控制性能和飞行效率的同时最大化的提升了机身结构的重量利用率,使得该多旋翼飞行器同时具有高可靠性、高效性和高精准度。本技术的所述多旋翼飞行器可以应用于各种领域,如航拍、农业、物流、环保等需要使用高效、稳定的飞行器来实现自动化和精准化执行任务的领域。
5、第二方面,本技术提供的上述多旋翼飞行器的飞行控制方法采用如下技术方案:
6、前述的多旋翼飞行器的飞行控制方法,包括以下步骤:
7、采集多旋翼飞行器的状态参数,并根据所述状态参数对所述飞行器的姿态进行估计;
8、将所估计出的姿态与目标姿态进行对比,获得相应的控制量;
9、基于所述控制量,根据电机的排布和旋转方向,计算各电机的转速;
10、控制各电机在所述转速下运转,并进行反馈控制,直至飞行器达到目标姿态。
11、通过采用上述方法,尤其是在本技术的多旋翼飞行器的结构布局的基础上,基于所述控制量,根据电机的排布和旋转方向,计算各电机的转速,从而控制飞行器达到目标姿态,能够充分有效的利用十二旋翼飞行器的潜力,提高其飞行效率和精度,并且在鲁棒性和稳定性方面具有很大的优势,可以推动飞行技术的发展和应用,为人们带来更多便利和价值。另外,若部分动力系统出现工作异常,本技术的方法会同步进行各电机转速调整,保证多旋翼飞行器具备继续飞行能力。且本技术的飞行控制算法可以适配不同的十二旋翼飞行器结构(比如正井字型或者整体倾斜45度等),实现更加普适和灵活的飞行控制。
12、优选的,当多旋翼飞行器需要同时实现在横滚-俯仰-航向-高度四个方向的飞行控制时,则通过以下方法计算各电机的转速:
13、首先,计算各电机转速的第一输出值=当前上升/下降基础转速+/-横滚轴调速绝对值tx+/-俯仰轴调速绝对值tx;
14、其次,根据各电机转向加入航向轴差速值对所述的各电机转速的第一输出值进行调整:
15、当反扭力方向与航向调整方向相同时,电机转速=电机转速的第一输出值+航向轴差速值;
16、当反扭力方向与航向调整方向不同时,电机转速=电机转速的第一输出值-航向轴差速值。
17、通过采用以上技术方案,从而可以实现每个电机独立精准的转速控制,同时还可以避免电机由于位置不同单轴姿态控制时又等速变换造成的机身额外应力,减少了机身结构的疲劳损伤。
18、优选的,当飞行器需要进行横滚/俯仰机动时,相对于横滚轴或俯仰轴,假设距离机身中心最远端的电机的调速比例为1,则其他电机的当前姿态轴调速绝对值(即速度变化绝对值)tx=(当前电机距离当前旋转轴的距离/所述最远端的电机距离当前旋转轴的距离)*所述最远端的电机的调速绝对值t;其中,所述最远端的电机的调速绝对值t =姿态单轴控制量u(t)*(电机最大油门值-电机最小油门值);在目标旋转角度正方向上的电机速度为增加,在目标旋转角度负方向上的电机速度为减少。
19、这里的x表示电机序号,比如t1为1号电机的调速绝对值,t2为2号电机的调速绝对值,如图4所示,本技术中的十二个电机中,六个电机顺时针旋转,六个电机逆时针旋转,且内环和外环中,相邻电机的转向相反。
20、通过采用上述技术方案,从而可以精准的控制各电机转速变化,以实现更加高效精准的姿态控制;另外,本技术中根据各电机的位置及转向计算出各电机的调速比例(即前述的当前电机距离当前旋转轴的距离/所述最远端的电机距离当前旋转轴的距离,在目标旋转角度正方向上的电机速度为增加,在目标旋转角度负方向上的电机速度为减少),可避免简单电机调速方案调速时由于电机距离机身重心距离不同但速度一致造成机身额外的无用受力载荷。
21、优选的,所述各个电机的航向轴差速值通过以下方式获得:
22、当飞行器需要进行航向调整时,假设距离机身中心最远端的电机的调速比例为1,则其他电机的航向轴差速值=(当前电机距离机身中心的距离/所述最远端的电机距离机身中心的距离)*所述最远端的电机的调速绝对值t;其中,所述最远端的电机的调速绝对值t=姿态单轴控制量u(t)*(电机最大油门值-电机最小油门值);所有电机根据自身转向方向和反扭力方向进行差速调整,目标旋转方向为正方向时电机加速,为负方向电机减速。
23、通过采用上述技术方案,相较部分机型加入可偏转的伺服机构使电机倾角发生变化以此来实现航向控制,本技术的结构重量更轻,控制更加简单且可靠性高。
24、优选的,当飞行器需要进行上升或下降时,根据期望上升或下降的速度调整所有电机的基础转速以实现飞行器整体上升及下降;
25、具体的,以当前所有电机转速的平均值作为基准值(即基础转速),当飞行器需要上升时,则所有电机在所述基准值的基础上增加转速,然后根据此调整后的飞行器的升降速度计算新的基准值,并进行转速调整,直至飞行器的速度达到期望的上升速度;
26、当飞行器需要下降时,则所有电机在所述基准值的基础上减少转速,然后根据此调整后的飞行器的升降速度计算新的基准值,并进行转速调整,直至飞行器的速度达到期望下降的速度。
27、通过采用上述技术方案,可使得无人机高度控制更加精准及平滑,不会出现较多高度振荡。
28、更优选的,所述的增加转速或减少转速具体包括:
29、各个电机的转速变化量输出时以1%作为初始值,一次运算及变速完成后,根据运算前飞行器的升降速度及运算后飞行器的升降速度进行比对,确定下一次的电机的转速变化量:
30、下一次的电机转速变化量=上一次电机转速变化量*(飞行器的目标升降速度/上次运算完成后飞行器的升降速度)。
31、通过采用上述技术方案进行电机速度控制,从而可以使得飞行器用更短的时间更快的达到目标高度。
32、优选的,具体通过以下方式获得所述控制量:
33、姿态单轴控制量u(t) = kp * e(t) + ki * e_i(t) + kd * e'(t);
34、其中,kp、ki、kd分别为当前姿态单轴的误差值e(t)、误差积分值e_i(t)和误差变化率e'(t)控制系数;误差值e(t)表示当前状态与目标状态之间的差值,误差变化率e'(t)表示误差随时间的变化速度,误差积分值e_i(t)表示误差随时间的累积值;
35、其中,
36、e(t) = x_d(t) - x(t);x(t)为当前时刻t的位置状态,x_d(t)为目标位置状态;
37、e'(t) = v_d(t) - v(t);v(t)为当前时刻t的速率,v_d(t)为目标速率;
38、e_i(t) =∫e(t) dt,即从起始时刻0到当前时刻t的积分;
39、单轴的kp、ki、kd值由实际飞行时不断调整kp、ki、kd,并观察飞行器相应姿态控制情况确定:
40、首先由小逐步增大kp值直至姿态控制出现震荡后,再逐步调整ki值以减小姿态控制震荡的幅度,直至无法继续减小为止;最后调整kd值以平滑姿态控制及修正曲线(即调整kd值使得姿态控制震荡的幅度进一步减小,也即,使得角度变化和时间的曲线更加平缓)。
41、通过采用上述技术方案,最终可实现飞行器各姿态轴迅捷且平滑的姿态控制能力,并且能够对外界干扰保持高速精准的响应。
42、第三方面,本技术公开的一种多旋翼飞行器的飞行控制系统采用如下技术方案:
43、一种多旋翼飞行器的飞行控制系统,包括以下步骤:
44、状态参数采集及状态估计模块,用于采集多旋翼飞行器的状态参数,并根据所述状态参数对所述飞行器的姿态进行估计;
45、控制量获取模块,用于将所估计出的姿态与目标姿态进行对比,获得相应的控制量;
46、电机转速计算模块,用于基于所述控制量,根据电机的排布和旋转方向,计算各电机的转速,从而控制飞行器达到目标姿态。
47、第四方面,本技术公开的一种计算机可读存储介质采用如下技术方案:
48、一种计算机可读存储介质,存储有能够被处理器加载并执行实现如前述任一种方法的计算机程序。
49、综上所述,本技术包括以下至少一种有益技术效果:
50、1.本技术在八旋翼飞行器中央增加一套四旋翼系统参与控制,从而在不增大机身的情况下同时能够提升飞行效率和控制性能,即实现了更加优秀的控制性能和飞行效率的同时最大化的提升了机身结构的重量利用率,使得该多旋翼飞行器同时具有高可靠性、高效性和高精准度。
51、2.本技术尤其是在本技术的多旋翼飞行器的结构布局的基础上,基于所述控制量,根据电机的排布和旋转方向,计算各电机的转速,从而控制飞行器达到目标姿态,能够充分有效的利用十二旋翼飞行器的潜力,提高其飞行效率和精度,并且在鲁棒性和稳定性方面具有很大的优势,可以推动飞行技术的发展和应用,为人们带来更多便利和价值。另外,若部分动力系统出现工作异常,本技术的方法会同步进行各电机转速调整,保证多旋翼飞行器具备继续飞行能力。且本技术的飞行控制算法可以适配不同的十二旋翼飞行器结构(比如正井字型或者整体倾斜45度等),实现更加普适和灵活的飞行控制。
- 还没有人留言评论。精彩留言会获得点赞!