电传飞行控制系统和方法与流程
本发明涉及飞机领域,尤其涉及一种电传飞行控制系统和方法。
背景技术:
1、在飞机设计过程中,存在以下问题:飞控系统计算机发生共模故障,可能导致冗余计算机全部丧失,飞机处于不可控状态;飞机全部液压系统失效,将导致飞控系统丧失控制能力;飞机电源系统失效,将可能导致电传飞控系统丧失供电,进而导致飞机控制能力降低。
2、在现有的电传飞控系统架构体系中,为了避免这些问题,通常采用复杂的余度配置和故障重构逻辑,但目前的几类飞控系统架构分别存在着余度/重构关系复杂或备份能力较弱的缺点。
3、例如,一种4余度ace(作动器控制电子)核心部分采用相似设计,其通过研制保证的方法表明对25.1309条款的符合性,但没有采用彻底的非相似设计或备份设计。另一种多重主/次级计算机叠加备份计算机(bcm)使得故障重构等控制逻辑异常复杂,设备数量较多,且备份计算机的引入会带来驾驶舱传感器余度增加、重量增加、系统切换逻辑复杂等诸多问题。
4、因此,本领域需要一种改进的电传飞行控制系统和方法。
技术实现思路
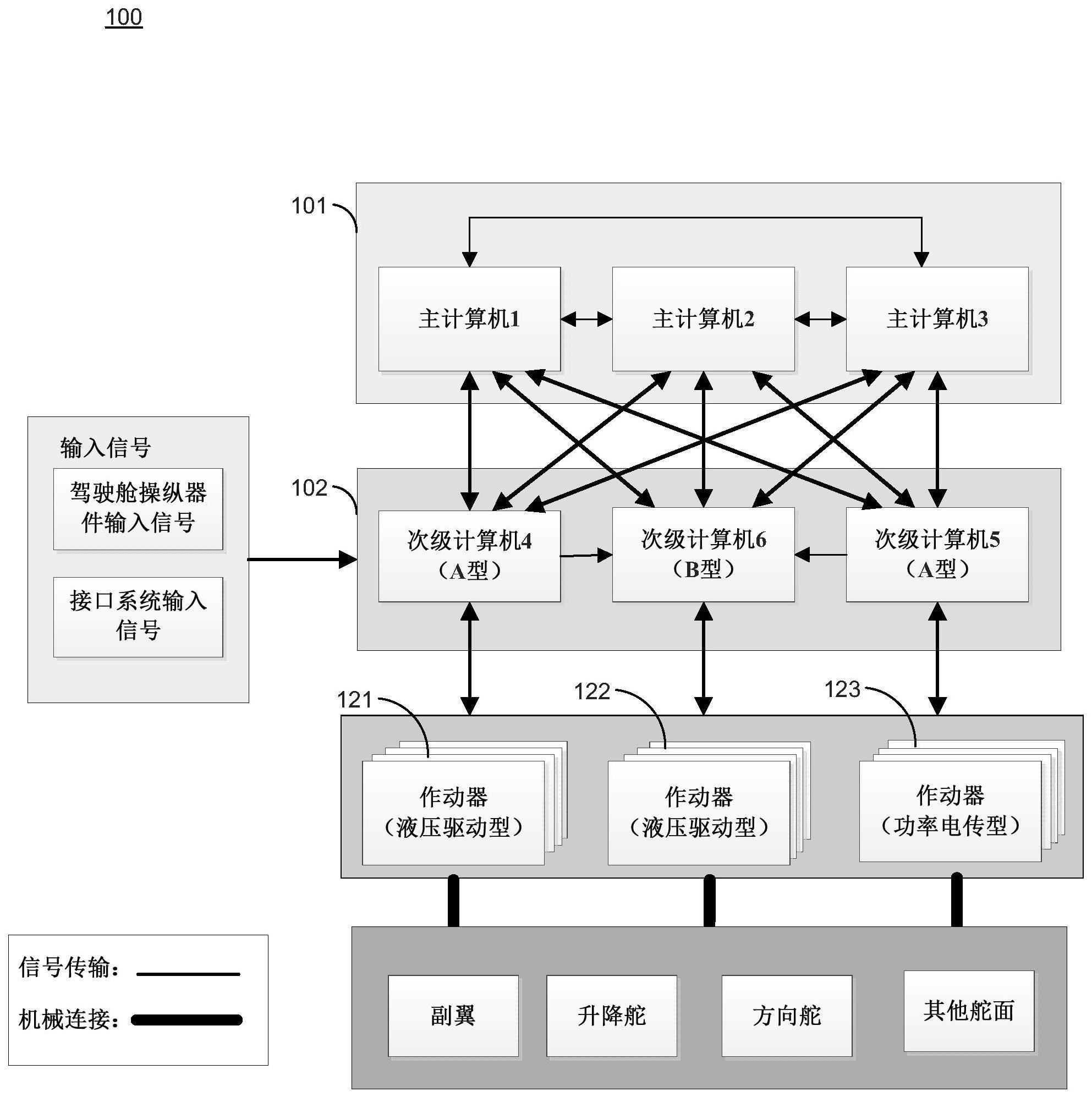
1、由此,本发明提出了一种改进的电传飞行控制系统和方法,克服了现有技术中飞控系统架构存在的余度/重构关系复杂或备份能力较弱的缺点。具体而言,本发明提出的电传飞行控制系统和方法可以有利地解决以上提出的一种或多种技术问题。例如,通过采用非相似的次级计算机,可高效地规避飞控计算机共模问题。在优选实施例中,本发明的系统采用多电架构,以功率电传作动器替换部分液压作动器,从而在双发失效、电源系统失效、全部液压失效等多种故障模式下,此飞控系统仍然可实现对飞机的最小可接受控制,保证飞机安全飞行和着陆。在另一优选实施例中,一个或多个次级计算机可具有备份电源,使得在飞机电源系统失效的情况下仍能实现对飞机的最小可接受控制。
2、在本发明的一个实施例中,提供了一种电传飞行控制系统,其包括:主计算机,所述主计算机根据操纵输入来计算舵面控制指令;第一次级计算机,所述第一次级计算机基于所述主计算机提供的所述舵面控制指令来生成第一舵面驱动信号;第二次级计算机,所述第二次级计算机基于所述主计算机提供的所述舵面控制指令来生成第二舵面驱动信号,所述第二次级计算机与所述第一次级计算机是非相似的;第一作动器,所述第一作动器根据由所述第一次级计算机提供的第一舵面驱动信号来驱动飞机舵面;以及第二作动器,所述第二作动器根据由所述第二次级计算机提供的第二舵面驱动信号来驱动所述飞机舵面。
3、在一方面,所述第一次级计算机由主电源供电,并且所述第二次级计算机由主电源和备份电源供电。
4、在一方面,所述第二次级计算机在接收到所述第一次级计算机的抑制信号的情况下抑制所述备份电源的供电,并且所述第二次级计算机在未接收到所述第一次级计算机的抑制信号的情况下,如果所述主电源丧失供电,则所述第二次级计算机激活所述备份电源并由所述备份电源供电。在电源主电源故障或第一次级计算机共模故障工况下,通过激活第二次级计算机的备用电源,可保证飞机仍能安全飞行和着陆。
5、在一方面,所述第一作动器包括功率电传作动器或液压作动器,并且所述第二作动器包括液压作动器。
6、在一方面,所述电传飞行控制系统还包括:第三次级计算机,所述第三次级计算机基于所述主计算机提供的所述舵面控制指令来生成第三舵面驱动信号,所述第三次级计算机与所述第一次级计算机是相似或非相似的,所述第三次级计算机与所述第二次级计算机是非相似的;以及第三作动器,所述第三作动器根据由所述第三次级计算机提供的第三舵面来驱动所述飞机舵面,其中所述第一作动器包括液压作动器,并且所述第三作动器包括功率电传作动器。
7、在一方面,所述第一次级计算机和所述第一作动器形成实现飞机最小可接受控制的第一控制通道;并且所述第二次级计算机和所述第二作动器形成实现飞机最小可接受控制的第二控制通道。
8、在本发明的一个实施例中,提供了一种飞机,其包括如上任一项所述的电传飞行控制系统。
9、在本发明的一个实施例中,提供了一种电传飞行控制方法,其包括:使用主计算机根据操纵输入来计算舵面控制指令;使用第一次级计算机基于所述主计算机提供的所述舵面控制指令来生成第一舵面驱动信号;使用第二次级计算机基于所述主计算机提供的所述舵面控制指令来生成第二舵面驱动信号,所述第二次级计算机与所述第一次级计算机是非相似的;使用第一作动器根据由所述第一次级计算机提供的第一舵面驱动信号来驱动飞机舵面;以及使用第二作动器根据由所述第二次级计算机提供的第二舵面驱动信号来驱动所述飞机舵面。
10、在一方面,所述第一次级计算机由主电源供电,并且所述第二次级计算机由主电源和备份电源供电。
11、在一方面,所述电传飞行控制方法还包括:所述第二次级计算机在接收到所述第一次级计算机的抑制信号的情况下抑制所述备份电源的供电,并且所述第二次级计算机在未接收到所述第一次级计算机的抑制信号的情况下,如果所述主电源丧失供电,则所述第二次级计算机激活所述备份电源并由所述备份电源供电。
12、在一方面,所述第一作动器包括功率电传作动器或液压作动器,并且所述第二作动器包括液压作动器。
13、在一方面,所述电传飞行控制方法还包括:使用第三次级计算机基于所述主计算机提供的所述舵面控制指令来生成第三舵面驱动信号,所述第三次级计算机与所述第一次级计算机是相似或非相似的,所述第三次级计算机与所述第二次级计算机是非相似的;以及使用第三作动器根据由所述第三次级计算机提供的第三舵面来驱动所述飞机舵面,其中所述第一作动器包括液压作动器,并且所述第三作动器包括功率电传作动器。
14、在一方面,所述第一次级计算机和所述第一作动器形成实现飞机最小可接受控制的第一控制通道;并且所述第二次级计算机和所述第二作动器形成实现飞机最小可接受控制的第二控制通道。
技术特征:
1.一种电传飞行控制系统,其特征在于,包括:
2.如权利要求1所述的电传飞行控制系统,其特征在于:
3.如权利要求2所述的电传飞行控制系统,其特征在于:
4.如权利要求1所述的电传飞行控制系统,其特征在于:
5.如权利要求4所述的电传飞行控制系统,其特征在于,还包括:
6.如权利要求1所述的电传飞行控制系统,其特征在于:
7.一种飞机,包括如权利要求1-6中任一项所述的电传飞行控制系统。
8.一种电传飞行控制方法,其特征在于,包括:
9.如权利要求8所述的电传飞行控制方法,其特征在于:
10.如权利要求9所述的电传飞行控制方法,其特征在于,还包括:
11.如权利要求8所述的电传飞行控制方法,其特征在于:
12.如权利要求11所述的电传飞行控制方法,其特征在于,还包括:
13.如权利要求8所述的电传飞行控制方法,其特征在于:
技术总结
公开了一种电传飞行控制系统和方法。主计算机根据操纵输入来计算舵面控制指令,第一次级计算机和第二次级计算机分别基于主计算机提供的舵面控制指令来生成第一舵面驱动信号和第二舵面驱动信号。第二次级计算机与第一次级计算机是非相似的。第一作动器和第二作动器分别根据第一舵面驱动信号和第二舵面驱动信号来驱动飞机舵面。第一作动器和第二作动器可包括不同类型的作动器。在主电源供电故障或第一次级计算机共模故障工况下,可激活第二次级计算机的备用电源,保证飞机仍能安全飞行和着陆。还公开了电传飞行控制方法。
技术研发人员:唐志帅,郭建伟,胡令令,司马骏,吕延平,柳建锋
受保护的技术使用者:中国商用飞机有限责任公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!