一种旋翼轮式陆空两栖无人机及其运行方法
本发明涉及无人机,特别是涉及一种旋翼轮式陆空两栖无人机及其运行方法。
背景技术:
1、在水利工程建模过程中,一般采用无人机搭载激光扫描仪对地形进行扫描建模,但是在这些过程中难免会遇到一些沟壑,这些地方要么比较狭小不利于无人机勘测,要么树林过于茂密容易干扰无人机飞行。因此对于这些位置目前采用人工手持扫描仪的方式进行勘测,但对于部分过于险峻的、树林茂密的区域,人工也无法进入,只能放弃。但这会造成勘测不全,容易影响最终的设计、施工。
2、申请人在申请号为2023101553260的中国发明专利申请中已经公开了一种用于解决上述问题的两栖无人机,其主要是将起落架替换为履带,利用履带实现行走。申请人在后续的研发中发现这种方式会明显增加无人机的自重,同时在飞行过程中也会明显增加风阻,从而影响续航时长。
3、对此申请人经过长时间研究后认为最好的方式是将机翼和车轮融合,同时对结构、重量进行优化设计,从而在控制成本、自重的前提下尽量提高续航时间,但目前并没有此类的技术方案。
技术实现思路
1、有鉴于现有技术的上述缺陷,本发明所要解决的技术问题是提供一种旋翼轮式陆空两栖无人机及其运行方法,其无人机将机翼和车轮融合为一体以实现陆空两栖运行。
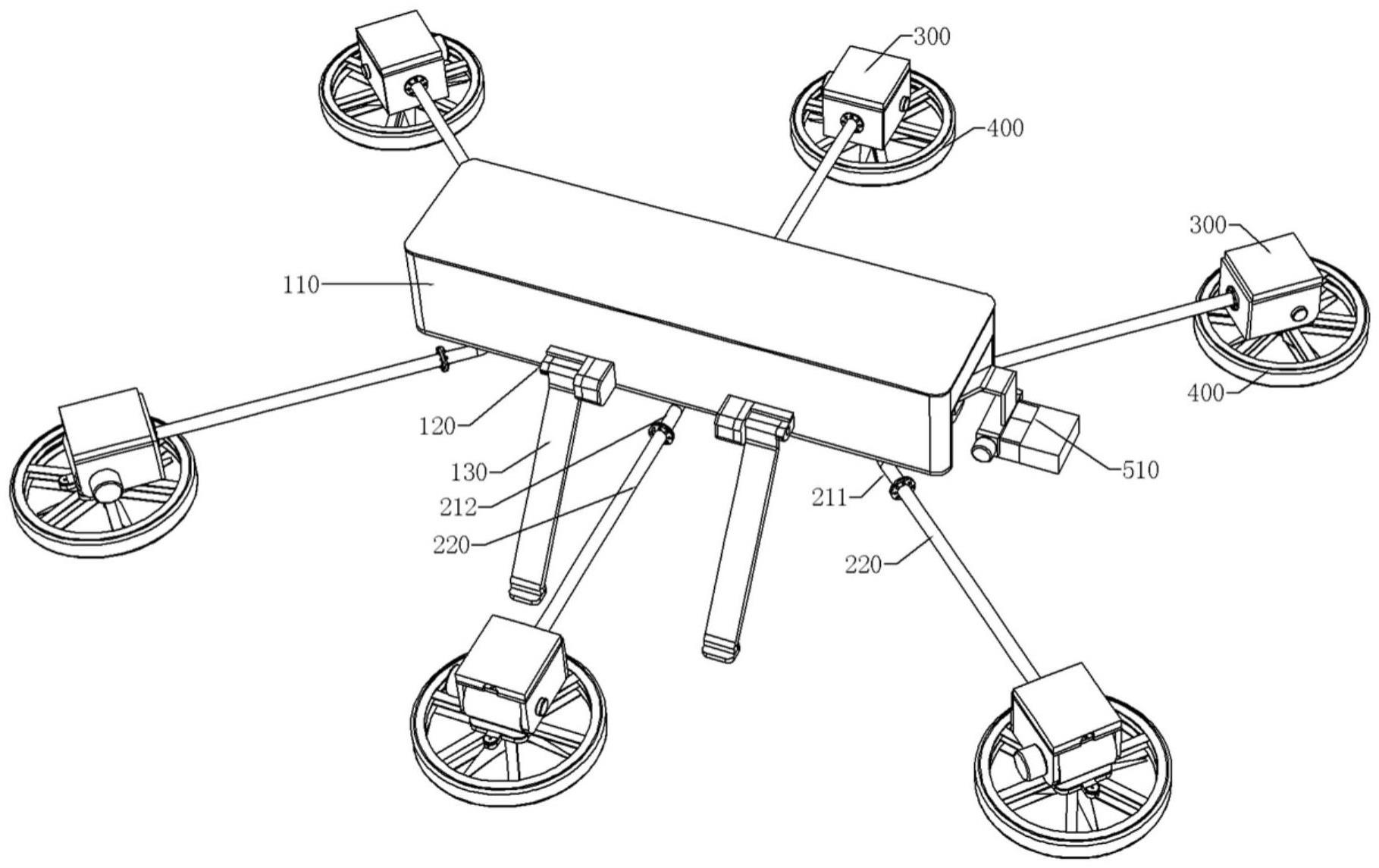
2、为实现上述目的,本发明提供了一种旋翼轮式陆空两栖无人机,包括机身、驱动模块、旋翼轮组件、云台,所述驱动模块直接或间接安装在机身上,所述驱动模块用于驱使旋翼轮组件运行;所述驱动模块、旋翼轮组件有飞行模式、车行模式两种状态,飞行模式、车行模式切换时只需要旋翼轮组件在水平状态和垂直状态之间切换即可;云台安装在机身上,且云台搭载用于测绘或探测的装置;
3、所述旋翼轮组件包括轮架、轮胎、旋翼,轮胎套装在轮架外且与轮架相对固定装配;旋翼安装在轮架内,所述旋翼套不可相对圆周转动地套装在第二动力轴上;轮架上安装有轴管、轴套,轴管至少有两个且沿着轴套的圆周方向均匀分布;第二动力轴的另一端依次穿过轴套、安装套后与第二伞齿轮装配固定,所述第二动力轴与轴套可圆周转动装配、与安装套可圆周转动且不可轴向移动装配;所述安装套上固定有安装环,安装环可圆周转动且不可轴向移动地安装在驱动座上;
4、所述驱动模块包括驱动架、驱动罩、切换壳、驱动座,所述驱动架与外连管装配固定,所述驱动罩安装在驱动架上,所述切换壳安装在驱动架内,且切换壳分别套装在第一动力轴、动力轴套外,所述第一动力轴的一端穿出切换壳、驱动架后与驱动电机的输出轴连接,驱动电机安装在驱动架上,第一动力轴的另一端装入动力轴套内且与之可圆周转动装配,所述动力轴套可圆周转动地安装在驱动架上且动力轴套与切换壳不可相对圆周转动装配;
5、所述动力轴套装入切换壳的一端上设置有第一离合盘;所述第一动力轴分上分别安装有第一伞齿轮、电磁套、离合套,离合套可轴向滑动且不可相对圆周转动地套装在第一动力轴上,离合套还可圆周转动地安装在第一切换架上,所述离合套位于第一切换架的两端上还分别安装有第二离合盘、磁环,所述第二离合盘与第一离合盘正对且可与第一离合盘压紧传动,所述磁环具有磁性且与电磁套环压紧或靠近,离合套位于第一切换架和磁环之间的部分上套装有切换弹簧,切换弹簧用于对磁环施加向电磁套环推动的弹力,以使得初始状态时第二离合盘与第一离合盘保持分离、不传动;
6、所述电磁套环设置在电磁套上,电磁套可圆周转动地套装在第一动力轴上且电磁套外安装有电磁外套,所述电磁外套安装在第二切换架上,所述电磁套外套装有电磁线圈,电磁线圈位于电磁套和电磁外套之间且电磁线圈通过电缆供电;
7、电磁线圈通电后产生磁场,磁场通过电磁套环、电磁套向磁环释放并对磁环产生排斥磁力,磁力驱使磁环挤压切换弹簧向第一离合盘移动直到第二离合盘与第一离合盘压紧传动,此时第一动力轴驱使离合套转动,离合套通过第二离合盘驱使动力轴套转动以驱使切换壳相对于驱动架转动;第一切换架、第二切换架均安装在切换壳内;
8、所述第一伞齿轮与第二伞齿轮啮合传动;所述第二伞齿轮面向驱动座的端面上安装有第一摩擦盘,所述第一摩擦盘与第二摩擦盘正对靠近且可压紧传动,第二摩擦盘可向第一摩擦盘移动以与第一摩擦盘压紧传动;
9、所述第二摩擦盘上还设置有摩擦轴套,所述摩擦轴套套装在轮轴的一端上,所述轮轴的另一端穿过安装环、锁止盘后装入轴管内且与之可轴向滑动装配,所述锁止盘与轮轴、第二摩擦盘不可相对轴向移动装配,所述轮轴位于安装环、锁止盘之间的部分上套装有离合弹簧,离合弹簧对锁止盘施加向锁位环压紧的推力以使得初始状态时锁止盘与锁位环压紧从而使得锁止盘不能相对于驱动座圆周转动,此时第二动力轴只能驱使旋翼转动,从而保持飞行模式。
10、作为本发明的进一步改进,所述机身上安装有旋转连管、固定连管,所述旋转连管可圆周转动且不可轴向移动地安装在机身上,所述固定连管固定在机身上;所述旋转连管、固定连管通过对应的外连管与对应的驱动模块装配固定,每个驱动模块对应一个旋翼轮组件;
11、所述旋转连管上还安装有旋转蜗轮,所述旋转蜗轮与旋转蜗杆啮合传动,所述旋转蜗杆设置在旋转电机轴上,旋转电机轴的一端装入旋转电机内,旋转电机安装在机身内;
12、车行模式时,旋转连管对应的旋翼轮组件向与固定连管对应的旋翼轮组件转动收起,此时为收起状态。
13、作为本发明的进一步改进,旋翼轮式陆空两栖无人机还包括降落杆,所述降落杆的两端上分别设置有铰接端、承压块,所述承压块用于在无人机起降时支撑机身,所述铰接端装入铰接座内,铰接座安装在机身上,且铰接座上分别安装有铰接罩、限位,铰接轴穿过铰接座、铰接端且一端与收展蜗轮装配,所述收展蜗轮与收展蜗杆啮合传动,所述收展蜗杆设置在收展轴上,所述收展轴穿过机身且与之可圆周转动装配,收展轴的两端分别安装展蜗杆;所述收展蜗轮安装在铰接罩内;
14、所述收展轴有两根、降落杆有四根,每根收展轴的两端分别对应一根降落杆,两根收展轴之间通过收展皮带连接并构成带传动机构,其中一根收展轴通过收展动力带与收展电机的输出轴连接并构成带传动机构。
15、作为本发明的进一步改进,轮架上安装有三个轮辋,靠近驱动模块的两个轮辋之间通过轴管、轴套装配固定,旋翼上安装有旋翼套,且旋翼安装在远离驱动模块的两个轮辋之间;所述第二动力轴的一端与最远离驱动模块的轮辋可圆周转动装配;轮辋上设置有轮辋盘,最靠近驱动模块的轮辋盘与锁位环压紧或靠近。
16、作为本发明的进一步改进,所述第二摩擦盘上可圆周转动地安装有端面轴承,所述端面轴承的座圈上安装有第一切换凸块,所述第一切换凸块上设置有第一切换斜面;第一切换斜面与第二切换斜面贴紧配合,所述第二切换斜面设置在第二切换凸块上,所述第二切换凸块安装在切换转盘上,所述切换转盘可圆周转动且不可轴向移动地安装在驱动座上,所述切换转盘外套装固定有切换套,切换套的外壁上安装有切换套块,所述切换套块与切换拉簧的一端装配,切换拉簧的另一端与拉簧块装配,拉簧块安装在驱动座上;所述切换套块与拉索的一端装配固定,拉索的另一端绕过导轮后与解锁块的一端装配,导轮可圆周转动地安装在驱动座上,所述解锁块卡合且滑动地安装在驱动座滑槽内,驱动座滑槽设置在驱动座上,解锁块上还设置有解锁槽,解锁槽内设置有解锁斜面;
17、所述拉簧用于对切换转盘的转动提供阻尼,以使得初始状态时,第二切换斜面的轴向较薄、第一切换斜面的轴向较厚贴紧,此时第二摩擦盘不与第一摩擦盘接触。
18、作为本发明的进一步改进,所述驱动座上分别设置有驱动座孔、驱动座环、第一锁孔、第二锁孔,所述驱动座环设置在驱动座孔内,所述安装环装驱动座环和切换转盘之间以使得安装环不可相对于驱动座轴向移动但能圆周转动;
19、初始状态时,所述摩擦轴套的端面压紧在安装环上以限制第二摩擦盘远离第一摩擦盘的最大位移量;所述锁止盘、锁位环均安装在驱动座孔内;
20、当第二摩擦盘与第一摩擦盘压紧传动时,锁止盘不与锁位环接触,第二摩擦盘带动轮轴转动,轮轴带动轮辋、锁止盘转动,从而带动轮胎转动以实现行走。
21、作为本发明的进一步改进,飞行状态时,旋翼轮组件处于水平状态,所述第二锁孔与电磁伸缩轴卡合装配,所述电磁伸缩轴装入电磁铁内,电磁铁安装在驱动架上,所述驱动座设置有第二锁孔的一端卡装入锁座的锁座槽内,所述锁座安装在驱动架上;此时电磁伸缩轴对驱动座的锁紧,使得驱动壳无法转动,从而保持飞行状态。
22、作为本发明的进一步改进,行走模式时,所述第一锁孔与插锁块的一端卡合装配,插锁块的另一端穿过解锁槽、穿出驱动座后与插锁板装配,所述插锁块上分别安装有滚轮、保持板,所述滚轮与解锁斜面压紧以推动解锁块向远离拉索的方向移动,拉索驱使切换转盘转动以使得第二切换斜面的轴向较厚处、第一切换斜面的轴向较厚处贴紧从而将第二摩擦盘向第一摩擦盘推动直到第二摩擦盘、第一摩擦盘压紧传动,此时第二伞齿轮直接驱使轮辋转动,也就是直接驱使轮胎转动行走;
23、所述插锁板可轴向滑动地套装在插板导向轴上,插板导向轴安装在驱动驱动架上,插锁板与推杆电机的推杆电机轴装配,推杆电机安装在驱动架上、驱动罩内,所述推杆电机启动后驱使推杆电机轴轴向伸缩从而带动插锁同步移动以使得插锁块可进出第一锁孔,从而实现对驱动座的上锁、解锁。
24、作为本发明的进一步改进,动力轴套一端与编码器的输入轴连接,编码器安装在驱动架上;所述电磁套环、电磁套均采用软铁制作。
25、本发明还公开了一种旋翼轮式陆空两栖无人机的运行方法,包括如下步骤:
26、s1、初始状态时为飞行模式且降落杆打开,起飞后为了降低风阻,收展电机启动,驱使收展轴转动从而驱使降落杆向上转动至与外连管趋于平行的状态;起飞过程中,驱动电机驱使旋翼转动提供飞行动力;
27、s2、需要降落时,收展电机启动驱使降落杆恢复至初始状态,降落时利用降落杆支撑机身;
28、s3、需要切换为行走模式时,旋转电机启动,驱使对应的旋转连管携带旋翼轮组件转动90°至各个旋翼轮组件平行的状态;启动电磁铁,电磁铁驱使电磁伸缩轴回缩退出第二锁孔,完成解锁;
29、s4、启动电磁线圈,电磁线圈发出磁场,磁场通过排斥磁力驱使离合套向第一离合盘移动,直到第二离合盘与第一离合盘压紧传动;
30、启动驱动电机,驱动电机驱使第一动力轴转动,第一动力轴通过离合套带动动力轴套转动,动力轴套带动切换壳转动90°至行走状态,然后电磁线圈停止通电、停止驱动电机;此时设置有第一锁孔的驱动座一端卡装入卡锁槽内,启动推杆电机,推杆电机驱使插锁块装入第一锁孔内实现对驱动座的上锁;在此过程中,滚轮与解锁斜面压紧且逐渐推动解锁斜面上移,也就是推动解锁块上移,解锁块通过拉索驱使切换转盘转动,从而驱使第二切换凸块转动以使得第二切换凸块与第一切换凸块配合将第二摩擦盘向第一摩擦盘推动压紧传动;此时锁止盘与锁位环分离,当第二伞齿轮转动时带动第二摩擦盘转动,第二摩擦盘通过轮轴带动轮辋同步转动,也就实现行走;
31、s5、在达到行走状态后,车轮在降落杆的支撑下不与地面接触,启动收展电机,收展电机驱使收展轴转动以驱使降落杆向上转动收起,此时车轮与地面接触支撑机身,驱使车轮转动即可实现陆地行走,而通过旋转电机驱使旋转连管转动即可实现转向功能;
32、s6、需要从行走模式切换至飞行模式时,降落杆由收起下降到展开状态以将轮胎抬升,然后旋转旋翼轮组件至初始状态即可。
33、本发明的有益效果是:
34、本发明将机翼和车轮融合,飞行模式时采用旋翼轮组件的机翼飞行,行走时旋翼轮组件变换为轮胎行走,从而可以有效简化结构、降低自重、降低风阻。同时还可以对车轮进行独立控制以实现陆地行走模式下的高机动性。
- 还没有人留言评论。精彩留言会获得点赞!