无人机模块的重构方法、电子设备与流程
本发明涉及飞行器,尤其涉及一种无人机模块的重构方法、电子设备。
背景技术:
1、针对飞行器的结构优化问题,枚举算法先找到所有非同构配置,再在其中选择最优的构型配置,其计算效率极为低下。并且,随着模块化无人机数量的增加,所有可能构型的集合呈指数增长,因此通过穷举搜索找到最优的配置变得不切实际。
技术实现思路
1、本发明旨在至少在一定程度上解决相关技术中的技术问题之一。为此,本发明的目的在于提出一种无人机模块的重构方法、电子设备,以提高无人机模块重构的效率和有效性。
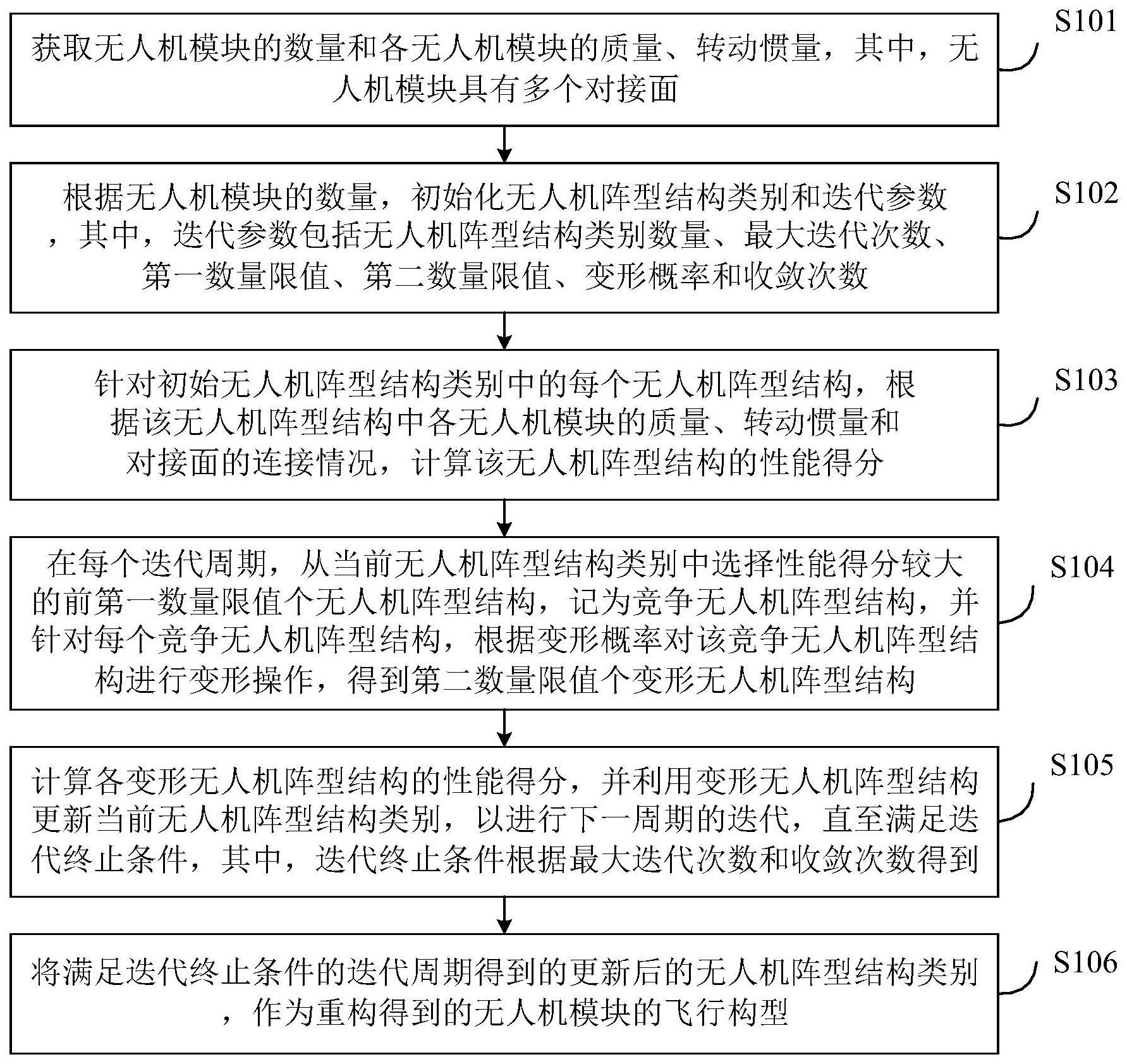
2、为达到上述目的,本发明第一方面的实施例提出了一种无人机模块的重构方法,所述方法包括:获取无人机模块的数量和各所述无人机模块的质量、转动惯量,其中,所述无人机模块具有多个对接面;根据所述无人机模块的数量,初始化无人机阵型结构类别和迭代参数,其中,所述迭代参数包括无人机阵型结构类别数量、最大迭代次数、第一数量限值、第二数量限值、变形概率和收敛次数;针对初始无人机阵型结构类别中的每个无人机阵型结构,根据该无人机阵型结构中各所述无人机模块的质量、转动惯量和对接面的连接情况,计算该无人机阵型结构的性能得分;在每个迭代周期,从当前无人机阵型结构类别中选择性能得分较大的前所述第一数量限值个无人机阵型结构,记为竞争无人机阵型结构,并针对每个所述竞争无人机阵型结构,根据所述变形概率对该竞争无人机阵型结构进行变形操作,得到所述第二数量限值个变形无人机阵型结构;计算各所述变形无人机阵型结构的性能得分,并利用所述变形无人机阵型结构更新所述当前无人机阵型结构类别,以进行下一周期的迭代,直至满足迭代终止条件,其中,所述迭代终止条件根据所述最大迭代次数和所述收敛次数得到;将满足所述迭代终止条件的迭代周期得到的更新后的无人机阵型结构类别,作为重构得到的所述无人机模块的飞行构型。
3、另外,本发明上述实施例的无人机模块的重构方法还可以具有如下附加的技术特征:
4、根据本发明的一个实施例,计算无人机阵型结构的性能得分,包括:根据所述无人机阵型结构中各所述无人机模块的连接情况和根节点处无人机模块的坐标位置,得到所述无人机阵型结构中各所述无人机模块的坐标位置;根据所述无人机阵型结构中各所述无人机模块的坐标位置和质量,计算所述无人机阵型结构的几何中心位置,并计算所述结构树中各所述无人机模块的坐标位置与所述几何中心位置之间的相对位置;根据所述相对位置和各所述无人机模块的转动惯量,构建目标函数;求解所述目标函数的最大值,并将所述最大值作为所述无人机阵型结构的性能得分。
5、根据本发明的一个实施例,通过下式计算所述无人机阵型结构的几何中心位置:
6、
7、其中,d0表示所述几何中心位置,表示所述无人机阵型结构的总质量,n表示所述无人机模块的数量,mi表示第i个无人机模块的质量,di表示第i个无人机模块的位置坐标。
8、根据本发明的一个实施例,所述根据所述相对位置和各所述无人机模块的转动惯量,构建目标函数,包括:根据所述相对位置和各所述无人机模块的转动惯量,得到所述无人机阵型结构的总转动惯量;根据所述总转动惯量和所述相对位置构建目标矩阵;根据所述目标矩阵构建所述目标函数。
9、根据本发明的一个实施例,所述目标函数通过下式表示:
10、
11、其中,表示所述目标矩阵,表示所述总转动惯量,ji表示第i个无人机模块的转动惯量,xi、yi分别表示第i个无人机模块相对所述几何中心位置的横坐标和纵坐标,cond(·)表示矩阵的条件数,σmax(·)表示矩阵的最大奇异值。
12、根据本发明的一个实施例,所述根据所述变形概率对该竞争无人机阵型结构进行变形操作,得到所述第二数量限值个变形无人机阵型结构,包括:生成预设范围内的随机数,其中,所述变形概率的取值在所述预设范围内;当所述随机数小于所述变形概率时,对所述竞争无人机阵型结构进行变形操作,以得到所述第二数量限值个变形无人机阵型结构。
13、根据本发明的一个实施例,所述对所述竞争无人机阵型结构进行变形操作,包括:随机选择所述竞争无人机阵型结构中相连的两个对接面进行断开,得到第一子阵型群和第二子阵型群;随机选择所述第一子阵型群上的一个空闲对接面,记为第一空闲对接面,并随机选择所述第二子阵型群上的一个空闲对接面,记为第二空闲对接面;将所述第一空闲对接面与所述第二空闲对接面进行连接,得到变形无人机阵型结构。
14、根据本发明的一个实施例,得到所述变形无人机阵型结构之后,所述方法还包括:对所述第一子阵型群和所述第二子阵型群中规模较小子阵型群进行旋转,得到旋转无人机阵型结构;判断所述旋转无人机阵型结构是否存在模块位置重叠现象;若不存在,则将所述旋转无人机阵型结构作为最终的变形无人机阵型结构。
15、根据本发明的一个实施例,所述方法还包括:当所述随机数大于或等于所述变形概率时,利用对应的竞争无人机阵型结构更新所述当前树状结构类别。
16、为达到上述目的,本发明第二方面的实施例提出了一种电子设备,包括存储器、处理器和存储在所述存储器上的计算机程序,所述计算机程序被所述处理器执行时,实现上述的无人机模块的重构方法。
17、本发明实施例的无人机模块的重构方法、电子设备,在每个迭代周期,从当前无人机阵型结构类别中选择性能得分较大的前第一数量限值个无人机阵型结构,记为竞争无人机阵型结构,并针对每个竞争无人机阵型结构,根据变形概率对该竞争无人机阵型结构进行变形操作,得到第二数量限值个变形无人机阵型结构;根据各变形无人机阵型结构中各无人机模块的质量、转动惯量和对接面的连接情况,计算各变形无人机阵型结构的性能得分,并利用变形无人机阵型结构更新当前无人机阵型结构类别,以进行下一周期的迭代,直至满足迭代终止条件,迭代终止条件根据最大迭代次数和收敛次数得到;将满足迭代终止条件的迭代周期得到的更新后的无人机阵型结构类别,作为重构得到的无人机模块的飞行构型。由此,可提高无人机模块重构的效率和有效性。
18、本发明附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:
1.一种无人机模块的重构方法,其特征在于,所述方法包括:
2.根据权利要求1所述的无人机模块的重构方法,其特征在于,计算无人机阵型结构的性能得分,包括:
3.根据权利要求2所述的无人机模块的重构方法,其特征在于,通过下式计算所述无人机阵型结构的几何中心位置:
4.根据权利要求2所述的无人机模块的重构方法,其特征在于,所述根据所述相对位置和各所述无人机模块的转动惯量,构建目标函数,包括:
5.根据权利要求4所述的无人机模块的重构方法,其特征在于,所述目标函数通过下式表示:
6.根据权利要求1所述的无人机模块的重构方法,其特征在于,所述根据所述变形概率对该竞争无人机阵型结构进行变形操作,得到所述第二数量限值个变形无人机阵型结构,包括:
7.根据权利要求6所述的无人机模块的重构方法,其特征在于,所述对所述竞争无人机阵型结构进行变形操作,包括:
8.根据权利要求7所述的无人机模块的重构方法,其特征在于,得到所述变形无人机阵型结构之后,所述方法还包括:
9.根据权利要求6所述的无人机模块的重构方法,其特征在于,所述方法还包括:
10.一种电子设备,包括存储器、处理器和存储在所述存储器上的计算机程序,其特征在于,所述计算机程序被所述处理器执行时,实现根据权利要求1-9中任一项所述的无人机模块的重构方法。
技术总结
本发明公开了一种无人机模块的重构方法、电子设备,方法包括:在每个迭代周期,从当前无人机阵型结构类别中选择性能得分较大的前第一数量限值个无人机阵型结构,记为竞争无人机阵型结构,并针对每个竞争无人机阵型结构,根据变形概率对该竞争无人机阵型结构进行变形操作,得到第二数量限值个变形无人机阵型结构;根据各变形无人机阵型结构中各无人机模块的质量、转动惯量和对接面的连接情况,计算各变形无人机阵型结构的性能得分,并利用变形无人机阵型结构更新当前无人机阵型结构类别,以进行下一周期的迭代,直至满足迭代终止条件,迭代终止条件根据最大迭代次数和收敛次数得到;将满足迭代终止条件的迭代周期得到的更新后的无人机阵型结构类别,作为重构得到的无人机模块的飞行构型。该方法可提高无人机模块重构的效率和有效性。
技术研发人员:苏垚,王濛,刘航欣
受保护的技术使用者:北京通用人工智能研究院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!