一种斜装姿态控制飞轮角动量优化分配方法与流程
本发明涉及卫星姿态控制领域。更具体地,涉及一种斜装姿态控制飞轮角动量优化分配方法。
背景技术:
1、目前,使用飞轮进行卫星姿态控制是基于角动量守恒原理,通过卫星和飞轮间的角动量交换实现卫星的姿态机动,或者通过飞轮吸收卫星所受的空间环境力矩实现卫星的姿态保持。在飞轮姿态控制过程中通过伪逆分配实现三轴姿态控制力矩指令向多轴飞轮控制力矩指令的转换,单纯采用伪逆分配策略算法简单,但是对飞轮组各飞轮角动量的欠约束易造成在姿态控制过程中随着空间环境力矩的累积,某一飞轮相比飞轮组其他飞轮的转速快速上升直至转速饱和,此时整个飞轮组的合成角动量未达到飞轮组的角动量包络体,但由于个别飞轮转速饱和造成该飞轮控制失效,从而造成姿态控制扰动,出现此种情况说明未能充分利用斜装飞轮组的控制能力。
2、针对以上斜装飞轮组姿态控制过程中某一飞轮转速过早饱和造成卫星姿态扰动的问题,本发明提出了一种斜装飞轮组姿态控制过程中飞轮角动量优化分配的方法,可以避免某一飞轮转速过早饱和造成卫星姿态扰动。
技术实现思路
1、本发明的目的在于提供一种斜装姿态控制飞轮角动量优化分配方法,以解决现有技术存在的问题中的至少一个。
2、为达到上述目的,本发明采用下述技术方案:
3、本发明第一方面提供一种斜装姿态控制飞轮角动量优化分配方法,包括:
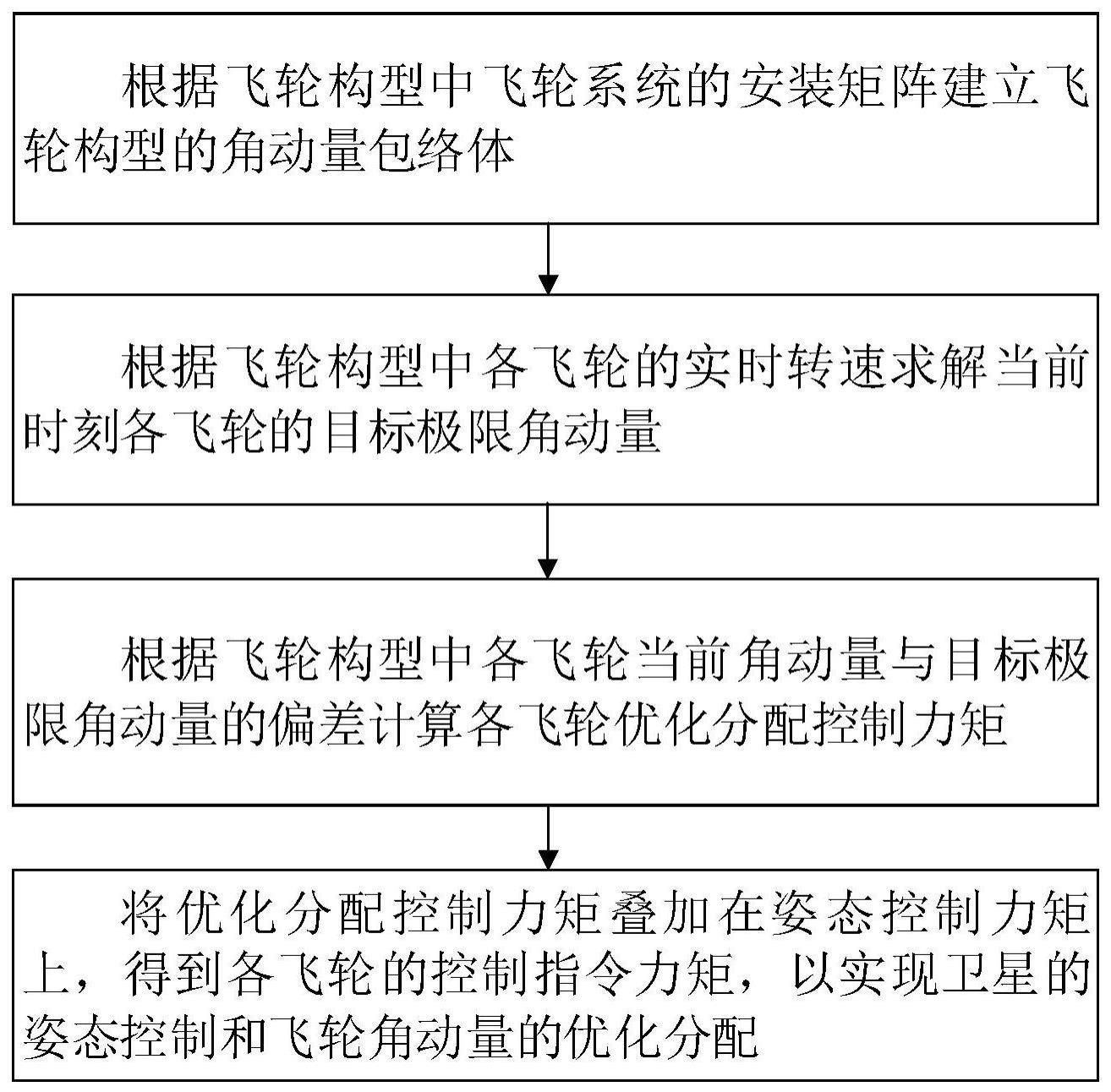
4、根据飞轮构型中飞轮系统的安装矩阵建立飞轮构型的角动量包络体;
5、根据飞轮构型中各飞轮的实时转速求解当前时刻各飞轮的目标极限角动量;
6、根据飞轮构型中各飞轮当前角动量与目标极限角动量的偏差计算各飞轮优化分配控制力矩;
7、将优化分配控制力矩叠加在姿态控制力矩上,得到各飞轮的控制指令力矩,以实现卫星的姿态控制和飞轮角动量的优化分配。
8、可选地,飞轮构型中飞轮系统的安装矩阵
9、
10、其中,各飞轮的角动量hw=[h1 h2 h3 h4]t,h1、h2、h3和h4均∈(-h,+h),h为飞轮的最大角动量,上表t表示转置;h1为第一飞轮的角动量,h2为第二飞轮的角动量,h3为第三飞轮的角动量,h4为第四飞轮的角动量,四斜装构型的飞轮系统四个飞轮绕卫星本体的y轴安装;四个飞轮的角动量轴线方向与卫星本体y轴的夹角为β,四个飞轮的角动量轴线在卫星本体xoz平面内投影与卫星本体x轴和z轴的夹角均为α。
11、可选地,所述建立飞轮构型的角动量包络体还包括得到飞轮系统在卫星本体下的角动量包络
12、hsr=c·hwr (2)
13、其中hwr为各飞轮最大角动量在空间任一方向上投影的矢量和,hsr为方向上角动量包络的一点。
14、可选地,根据角动量包络得到飞轮构型的角动量包络体,所述角动量包络体原点对称,包括14个顶点,24条棱,12个面,每个面都是四边形;其中
15、当任意两飞轮饱和时,飞轮组合成角动量矢量末端位于包络体的面上;
16、任意三个三飞轮饱和时,飞轮组合成角动量矢量末端位于包络体的棱上;
17、四飞轮饱和时,飞轮组合成角动量矢量末端位于包络体的顶点上;
18、其他情况下飞轮组合成角动量矢量末端位于包络体内部,飞轮组包括第一飞轮、第二飞轮、第三飞轮和第四飞轮。
19、可选地,求解当前时刻各飞轮的目标极限角动量包括
20、s1设当前时刻各飞轮转速为hwt=[h1t h2t h3t h4t]t,根据安装矩阵得到当前时刻各飞轮合成角动量的矢量方向rt=c·hwt/||c·hwt||;
21、s2设包络体上任一包络面为λi,其顶点为(ai1 ai2 ai3 ai4),该包络面的法线为
22、s3设则当ni·rt≠0且bi>0时,向量rt与包络面λi所在平面存在交点bi,其中oaij为原点o到包络面λi的任一顶点aij的矢量;
23、s4根据四边形内点判据,若有:
24、
25、则交点bi位于四边形ai1ai2ai3ai4内;向量rt与包络面λi相交,其交点为各飞轮在向量rt方向合成的最大角动量。
26、可选地,在向量rt与包络面λi交点处有两个飞轮饱和,两个飞轮未饱和,未饱和飞轮的角动量
27、
28、式中,hl和hm分别为两个饱和飞轮角动量,hk和hj分别为未饱和飞轮角动量,cjk为未饱和的两个飞轮的安装矩阵,clm为两个饱和飞轮的安装矩阵,向量rt方向上各飞轮的目标极限角动量为hl、hm、hk和hj。
29、可选地,各飞轮角动量附加分配控制力矩
30、tb=(i-ct(cct)-1c)δh (5)
31、δh为角动量优化分配的偏差,即各飞轮当前目标极限角动量与当前实际角动量的差,i为相应维度的单位阵。
32、可选地,各飞轮的控制指令力矩为:
33、t=tc+ktb (6)
34、式中,tc为姿态控制力矩,k为增益系数。
35、本发明第二方面提供一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现本发明第一方面提供的方法。
36、本发明第三方面提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现本发明第一方面提供的方法。
37、本发明的有益效果如下:
38、本发明所述方法可避免在控制过程中飞轮组未达到目标极限角动量前单个飞轮转速饱和,从而避免单飞轮转速饱和导致的对卫星姿态控制精度下降,最大化的利用了飞轮组的控制能力。本发明适用于所有四斜装飞轮构型,不增加硬件成本,不对卫星姿态控制产生影响。
技术特征:
1.一种斜装姿态控制飞轮角动量优化分配方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,
3.根据权利要求2所述的方法,其特征在于,所述建立飞轮构型的角动量包络体还包括得到飞轮系统在卫星本体下的角动量包络
4.根据权利要求3所述的方法,其特征在于,根据角动量包络得到飞轮构型的角动量包络体,所述角动量包络体原点对称,包括14个顶点,24条棱,12个面,每个面都是四边形;其中
5.根据权利要求4所述的方法,其特征在于,求解当前时刻各飞轮的目标极限角动量包括
6.根据权利要求5所述的方法,其特征在于,
7.根据权利要求2所述的方法,其特征在于,
8.根据权利要求7所述的方法,其特征在于,
9.一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1-8中任一项所述的方法。
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现如权利要求1-8中任一项所述的方法。
技术总结
本发明实施例公开一种斜装姿态控制飞轮角动量优化分配方法。在一具体实施方式中,该方法包括:根据飞轮构型中飞轮系统的安装矩阵建立飞轮构型的角动量包络体;根据飞轮构型中各飞轮的实时转速求解当前时刻各飞轮的目标极限角动量;根据飞轮构型中各飞轮当前角动量与目标极限角动量的偏差计算各飞轮优化分配控制力矩;将优化分配控制力矩叠加在姿态控制力矩上,得到各飞轮的控制指令力矩,以实现卫星的姿态控制和飞轮角动量的优化分配。本发明避免在控制过程中飞轮组未达到目标极限角动量前单个飞轮转速饱和,从而避免单飞轮转速饱和导致的对卫星姿态控制精度下降,最大化的利用了飞轮组的控制能力。
技术研发人员:王鹏飞,杨正楠,辛星,付志明
受保护的技术使用者:航天科工空间工程发展有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!